軟件定義網絡環境下停車引導控制系統設計
2018-12-14 12:56:08劉國滿陳成偉
自動化與儀表 2018年11期
關鍵詞:區域
劉國滿,盛 敬,陳成偉
(1.南昌工程學院 江西省精密驅動與控制重點實驗室,南昌 330099;2.汕頭大學 機械工程學院,汕頭 515063)
隨著我國汽車工業的蓬勃發展,社會車輛占有率不斷提高,城市交通面臨著巨大的壓力。特別在我國大城市的中心地帶,出現了“一位難求”問題[1]。對于大型停車場來說,由于停放的車輛較多,尋找停車位的路線復雜,若沒有適當的停車引導控制,停車場內極易發生車輛擁堵、相碰以及亂停亂放等現象。
本文提出了一種基于SDN環境下的停車引導控制系統,該引導控制系統通過區域分支調度器實時向SDN控制服務器上報控制區域內的停車位狀態情況以及當前其所控制路段行駛的車輛的交通狀況信息,SDN控制服務器按照目的停車位地址最大匹配算法進行停車車輛運行路線的計算和生成,以方便停車車輛能快速行駛到合適的目的停車位,方便了人員在大型停車場上進行停車和取車操作。
1 系統整體設計
圖1所示為停車引導控制系統結構示意,其由SDN控制服務器、區域分支調度器和車輛運行引導模塊或設備三部分組成。SDN控制服務器負責停車運行路線的計算和向區域分支調度器下發停車運行路線,區域分支調度器負責本地控制區域交通狀態情況的上報和根據停車引導路線進行運行指令的下發,車輛運行引導模塊或設備負責對停車的車輛運行操作的控制,如:左轉、右轉以及直行等操作。具體實施過程為車輛從入口處進入停車場時,由停車場SDN控制服務器根據所停的車輛的類型和大小,選擇一個合適的停車位,并將該目的停車位地址信息發送給所停的車輛運行引導模塊或設備上,當車輛行駛到相應區域時,有相應區域上分支調度器,根據該車輛需要到達的目的停車位,查找控制器上所保存的引導路線,指導該車輛在區域上運行路線。
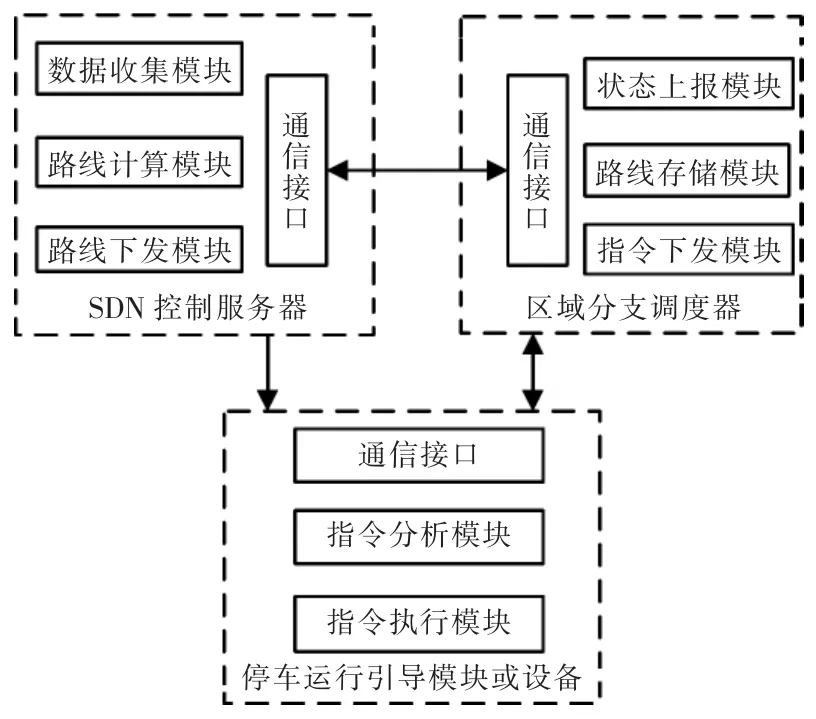
圖1 基于SDN停車引導控制系統結構示意Fig.1 Parking guidance control system structure diagram
停車場SDN控制服務器主要通過有線或無線網絡方式,根據當前停車場上停車位的空閑狀態和停車場道路上交通狀況,為每個區域停車位根據最大匹配算法計算出一條最優引導路線,發送給停車場上每個分支區域調度器,由區域分支調度器對停車的車輛運行引導模塊或設備進行行駛路線調度。另外,區域分支調度器根據其控制區域內的停車位空閑狀態和道路交通變化情況,實時上傳給停車場SDN控制服務器,由SDN控制服務器根據最新停車位空閑狀態和道路交通情況,由SDN控制服務器按照停車位地址最大匹配算法進行行駛路線計算和生成。而對于區域分支調度器主要通過無線通信方式,如:WiFi,ZigBee或藍牙通訊等,根據區域分支調度器上所生成的路線圖,發送運行指令給車輛運行引導模塊或設備,相應指令數據主要包括直行,左轉,右轉以及開始停車操作指令。其主要運行過程流程圖如圖2所示。
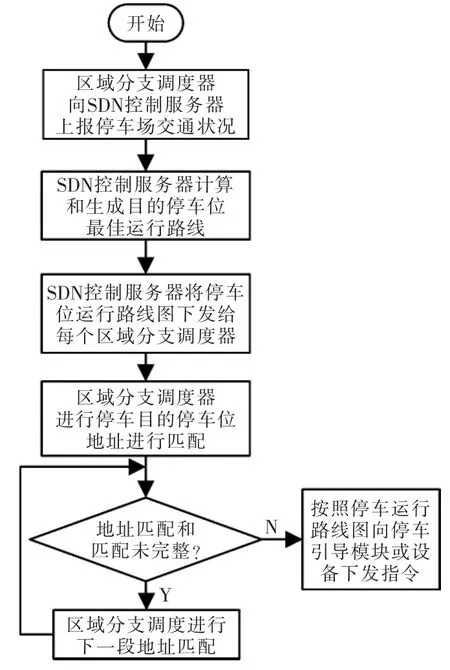
圖2 軟件定義網絡環境下停車引導運行流程Fig.2 Flow chart of parking guidance operation
2 關鍵技術
2.1 停車位地址編號
為了減少引導路線計算和配置的工作量,停車引導控制系統采用地址最大匹配算法進行停車位地址匹配和比較,確定車輛的停放過程的運行路線。在SDN控制服務器中對停車場上每個停車位進行地址編號時,應該盡量考慮到同一個區域上停車位運行路線一致性。相比不同區域,同一區域內所有停車位采用統一運行路線的原則可能會給部分停車位帶來引導路線較長的問題,難以實現所有車輛停放過程視為全局最優運行路線。
由于停車位采用分區域管理機制,參考IP網絡地址編配方式對停車位進行地址編號,對同一個區域內的所有停車位,在外界區域上保存同樣運行路線,以便實現基于地址最大匹配算法和原則進行運行車輛的引導,如若將一個停車場分成256大區域,且每個大區域均分成256個小區域,每個區域內又可以設定256內停車位。
2.2 路線引導算法
當車輛進入某一停車區域時,由該區域分支調度控制器對該車輛上車載設備進行問詢,根據該車輛所分配的目的停車位地址,先根據地址最大匹配原則進行地址匹配,其引導過程流程如圖3所示。實施過程如下:一個車輛所分配的停車位為128.255.100,若所進入區域編號為128.254區域時,若采取最大匹配原則,則大區域128匹配上后,再對里面小區域進行匹配,若匹配不上,則根據SDN控制服務器所下發的引導路線策略,選擇左轉,右轉和直行三種方式行駛。若小區域數值也匹配上,則根據引導路線策略,開始減速運行,開始進行車位號查找和匹配,以便行駛到相應停車位后,開始進行后續智能停車操作。
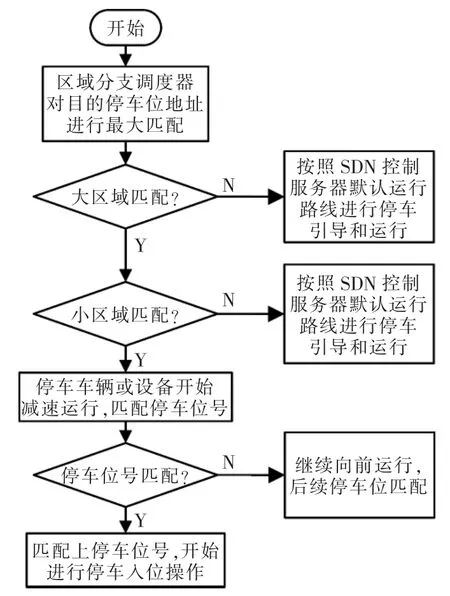
圖3 停車引導算法流程Fig.3 Flow chart of parking guidance algorithm
3 硬件系統設計
3.1 引導系統驅動模塊
在引導系統驅動模塊中,采用L298N驅動模塊對車輪上電機進行控制,實現引導系統的運行的停止、制動、正轉和反轉等功能[2]。其L298N驅動模塊線路連接圖如圖4所示,其電機正反轉運動原理如表1所示。
在ENA使能狀態,才可以通過IN1,IN2輸入口對電機的運行方向。若需要對電機進行調速,則在使能端口輸出PWM脈沖,來實現電機調速功能[3]。
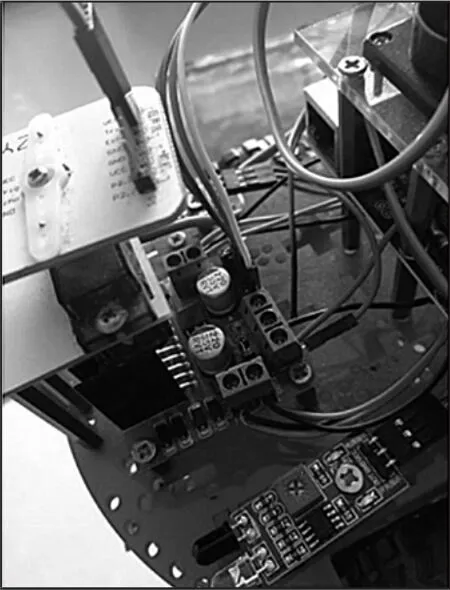
圖4 L298N驅動模塊線路連接圖Fig.4 L298N driver module line connection diagram
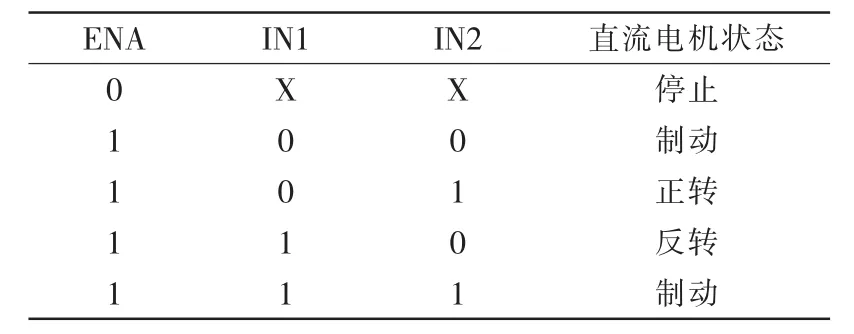
表1 電機正反轉原理Tab.1 Motor forward and reverse principle
3.2 引導系統控制系統
引導系統的控制系統采用STC89C52RC單片機系統,一種STC公司生產的低功耗、高性能CMOS 8位微控制器,具有8 K字節系統可編程Flash存儲器[4],在單芯片上,擁有靈巧的8位CPU和在系統可編程Flash,使得STC89C52為眾多嵌入式控制應用系統提供靈活、超有效的解決方案。在系統主要在停車運行引導模塊或設備上采用單片機進行控制,以便接收到區域分支調度器下發過來的運行指令時,進行解析處理和發送控制指令給相應控制單元,進行車輛運行方向和速度的調節。
4 軟件系統設計
4.1 PWM調速原理及實現
PWM是指將輸出信號的基周期固定,通過調整基本周期內工作周期的大小來控制輸出功率的方法。在PWM驅動控制的調整系統中,按一個固定周期的頻率來接通和斷開電源,并根據需要改變改變一個周期內“接通”和“斷開”時間的長短。因此,PWM又稱為“開關驅動裝置”[5]。脈沖作用下,當電機通電時,速度增加;點擊斷電時。速度逐漸減少。只要按一定規律改變通、斷電時間,即可讓點擊轉速得到控制。其PWM信號圖如圖5所示。
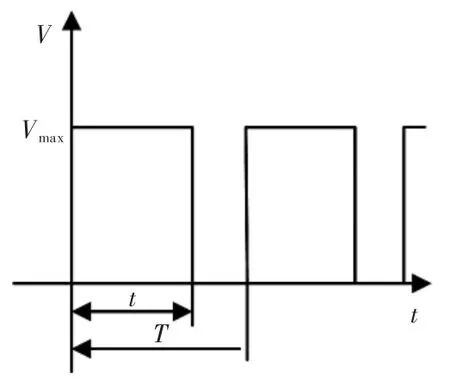
圖5 PWM信號示意圖Fig.5 PWM signal diagram
其中PWM信號中的占空比D=t/T,其中t表示一個周期內高電平的時間,T表示一個運行周期時間,通過改變這個占空比D的值,可以來改變電機的速度[6]。其主要實現代碼如下:
(1)void pwm_out_left_moto (void)//左電機調速,調節push_val_left的值改變電機轉速
(2)void pwm_out_right_moto (void)//右電機調速,調節push_val_left的值改變電機轉速。
4.2 循跡模塊
紅外循跡模塊對環境光線適應能力強,在位于地下停車場這種地方只有一種光線它能很好地感應黑線而基本不會出現失誤,紅外循跡模塊具有一對紅外線發射與接收管,發射管發射出一定頻率的紅外線,當檢測方向遇到反射面(白色地板)時,紅外線發射回來被接收管接收[7],經過比較器電路處理器后,此時智能車后退方向往反方向行走;如模塊探測到黑線,則智能車倒退方向為同方向,同時信號輸出接口輸出數字信號(一個低電平信號);其工作電壓為3.3 V~5 V。
此套紅外光電傳感器固定在底盤后方同時貼近地面,用來智能車倒退探測黑線的貼近地面。正常行駛時,發射管發射紅外光照射地面,光線經白紙反射后被接收管接收,輸出高電平信號;智能車經過黑線時,發射端發射的光線被黑線吸收,接收端接收不到反射光線[8],傳感器輸出低電平信號后送ST89C52單片機處理,判斷執行哪一種預先編制的程序來控制智能車的行駛狀態,其實現主要算法流程如圖6所示。
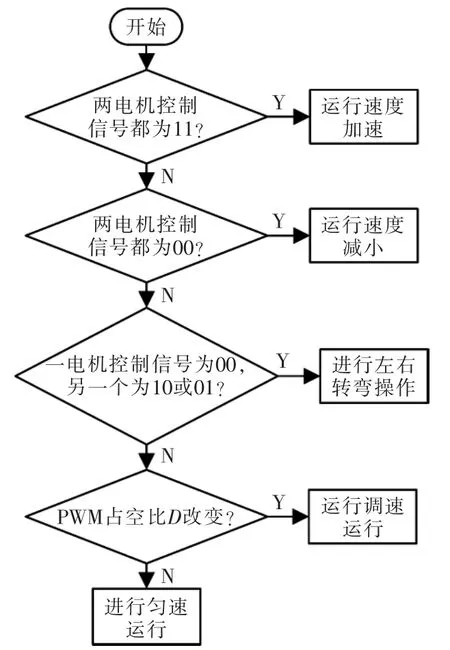
圖6 循跡算法流程Fig.6 Sequential algorithm flow chart
4.3 通信模塊
系統測試模塊基于藍牙通信技術,實現分支區域調度器與車輛上運行引導模塊或設備之間的通信功能,其實現過程中主要分成了三大模塊。
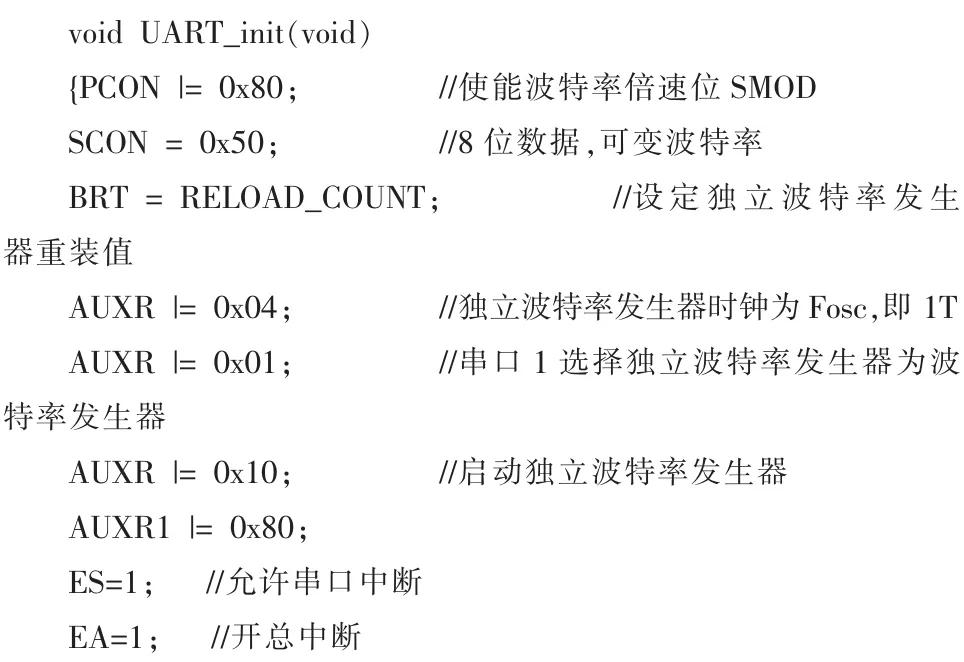
1)UART 口初始化功能(UART_INIT)
該功能主要對UART口進行通信參數的初始化和設置,其主要實現代碼如下:
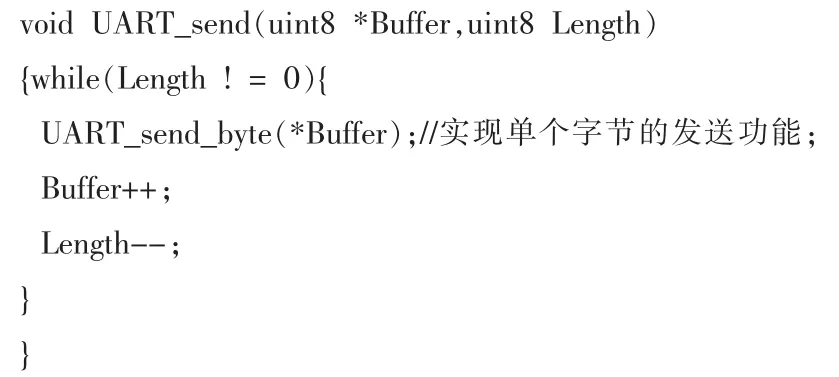
2)藍牙發送功能
該功能模塊主要用來實現將需要發送的緩沖區內的數據指令發送出去[9],其實主要代碼如下所示:
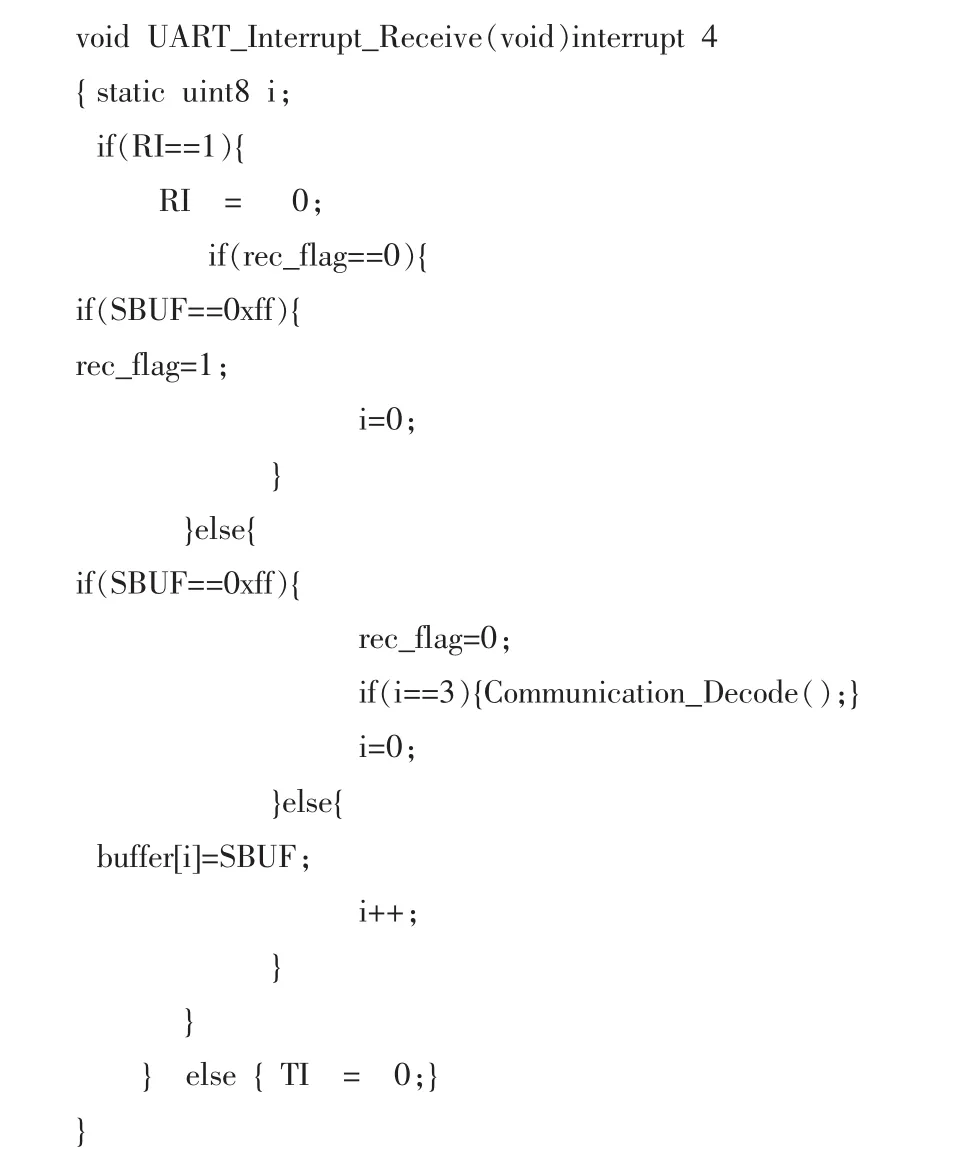
3)藍牙接收功能
該功能模塊主要通過中斷信號方式,當有需要數據進行接收,進行藍牙接收功能的處理[7],其實現代碼如下:
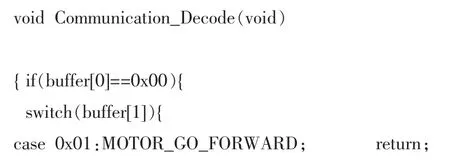
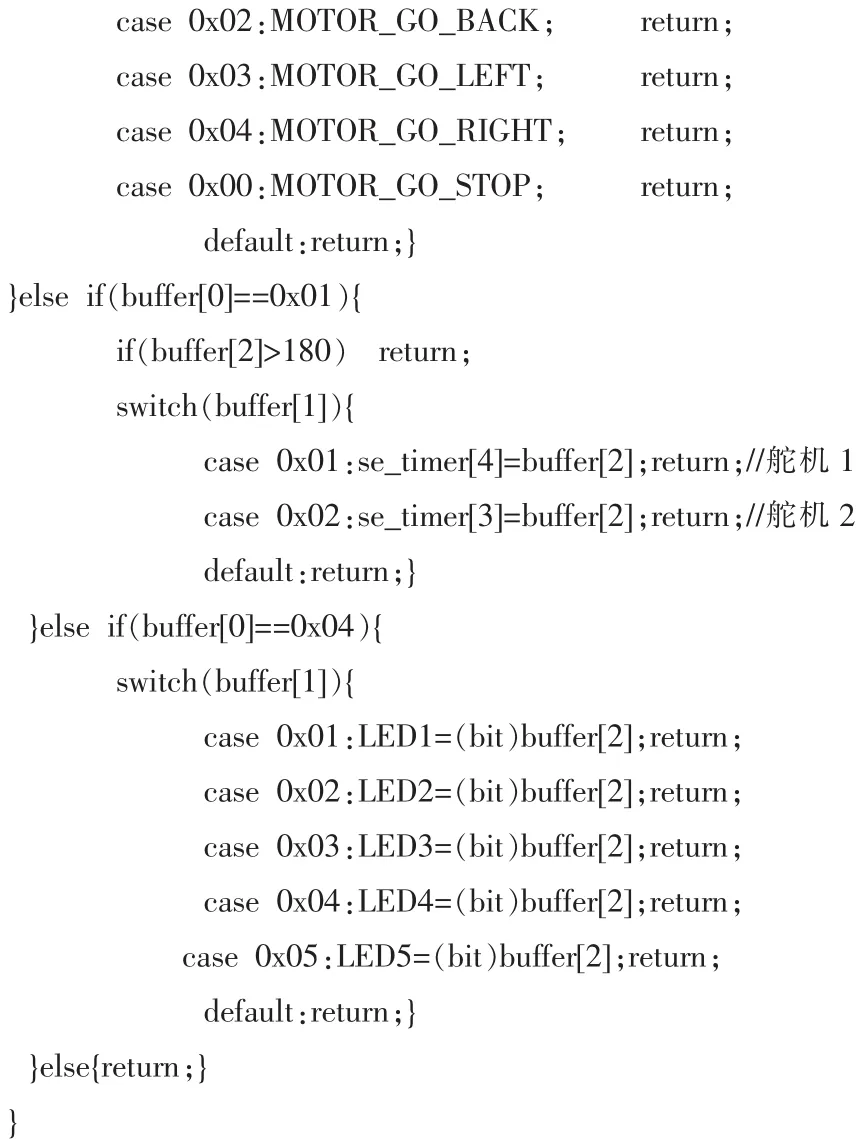
4.4 停車引導系統指令數據解析模塊
該模塊主要對分支區域調度器發送給車輛上運行引導模塊或設備上指令數據進行解析,以便根據解析結果,車輛采取相應處理操作和動作。其實現主要代碼如下:
5 測試與驗證
在停車引導系統的測試環節,采用小車樣機在模擬停車場環境下進行停車操作測試。每個區域內分支調度器根據所停車輛的目的停車位,根據地址最大匹配原則[10]進行路線查找,發送指令數據給小車樣機上運行引導控制系統,指導小車的運行。測試過程如圖7所示。
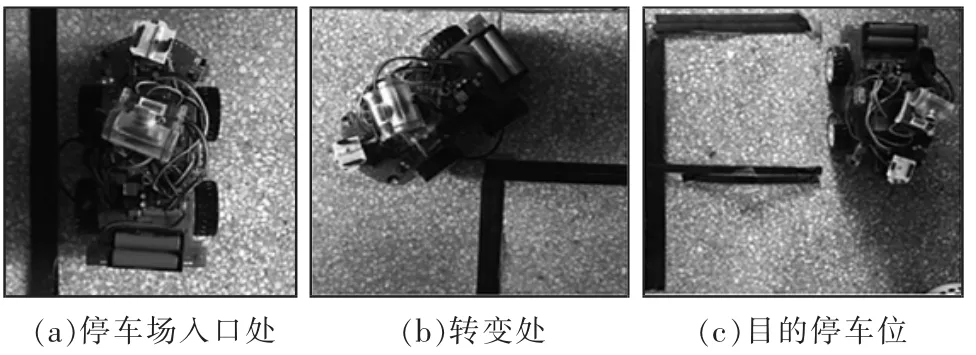
圖7 測試過程Fig.7 Test process
首先小車樣機停在模擬停車場入口處,由用戶電腦作為SDN控制服務器,通過藍牙通信,給小車下發一個目的停車位地址,并向其區域分支調度器下發到達該目的停車位具體引導路線圖。當小車開始運行時,其上運行引導模塊或設備就不斷定時地向區域分支調度器進行廣播自己所需到達目的停車位地址[11],由區域分支調度器根據最大地址匹配算法,進行該目的停車位地址的尋找,并將小車運行引導模塊或設備下發運行指令,進行直行或轉彎等運行操作[12],直至最后小車運行到目的停車位,開始后續的停車操作。
6 結語
本文主要設計一種在軟件定義網絡環境下停車引導控制系統,實現了控制和運行的分離,簡化了停車引導控制系統的復雜性,減少系統的硬件成本。由于車輛的停車運行路線是由停車場SDN控制服務器統一計算和調度,避免了停車場擁堵現象的發生。最后當前所研究的停車引導系統,只解決了從停車場入口處到目的停車位之間運行路線引導,并沒有考慮到如何將車輛自動導入車庫,這可能需要后續考慮的問題。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15