分布式基陣聯合定位算法仿真分析
2018-11-09 07:40:54王志剛陳韶華
水下無人系統學報 2018年5期
王志剛, 陳韶華, 王 維
?
分布式基陣聯合定位算法仿真分析
王志剛, 陳韶華, 王 維
(中國船舶重工集團公司 第710研究所, 湖北 宜昌, 443003)
在諸多水中目標定位的方法中, 相對于純方位目標定位與跟蹤算法計算量大、實時性差、定位和估計精度不高的不足, 多基陣聯合定位系統具有較強的抗干擾能力和生存能力。基于此, 文中提出了一種適用于水聲網絡的分布式基陣聯合定位方法, 分別給出了Jacobi迭代法、三角重心法和最小二乘法等算法的仿真計算模型, 比較分析了3種不同定位方法在不同基陣數和分布態勢下的定位仿真性能。仿真結果表明, 基于三基陣的Jacobi迭代法定位精度和收斂性要優于其他2種算法。最后, 根據應用情況提出了適合分布式基陣聯合定位的陣型、基陣數以及陣間距等參數, 以期提高對目標的定位性能和網絡生存能力, 為多基陣目標定位的工程應用提供參考。
水中目標定位; 分布式基陣; 水聲網絡; 純方位目標定位; Jacobi迭代法; 多基陣聯合定位
0 引言
由于單基陣的探測范圍小、定位精度不高,測距誤差較大, 因而難于滿足定位要求[1]。在實際應用中常常采用多陣聯合的形式擴大探測范圍和提高定位精度[2]。
純方位目標定位與跟蹤是無源定位跟蹤技術的一個重要分支, 單基陣測量的目標參數中以目標方位比較容易獲得,因此常常利用所測得的目標方位角信息來估計目標的位置、速度及加速度等。文獻[3]詳細介紹了多基陣純方位目標定向、定位的原理和方法。文獻[4]論述了定位算法評價方法和目標可觀察性分析。文獻[5]~[7]介紹了多基陣分布式探測定位時, 各個基陣分別探測估計目標方位, 經姿態補償修正到統一坐標系與時間同步后, 采用多基陣聯合定位算法利用每個子陣對方向角估計的結果, 通過幾何算法來精確目標位置。
分布式基陣聯合定位常用于水聲網絡對目標的探測、定位與跟蹤研究中, 同時應滿足高定位精度和較強的網絡生存能力。對此, 文中比較分析了Jacobi迭代法、三角重心法和最小二乘法(least squares method, LSM) 3種定位方法的性能特點。并根據應用情況提出了適合分布式基陣聯合定位的陣型、基陣數以及陣間距等參數, 可為分布式基陣目標定位的工程應用提供參考。
1 水面目標定位原理

1.1 Jacobi迭代法目標位置估計


則由以上定位線方程可得

迭代法具有收斂速度快的特性, 在滿足一定定位精度的條件下, 可以節省計算時間。但是迭代法是否收斂及其收斂速度與初始值的選擇有關。解決好初始值的問題是保證迭代法良好性能的前提條件。
1.2 重心法目標位置估計
重心法定位的優點在于方法簡單、計算量小,對硬件的要求較低, 但其定位精度依賴于單基陣測向精度, 定位精度較低。
1.3 LSM目標位置估計

解得目標位置估計
LSM具有很好的估計特性, 但受測量誤差的影響較大, 使用LSM進行定位解算會產生一定的誤差, 對定位精度有一定的影響。此方法對非線性方程線性化計算需要的條件比較嚴格, 但是如果能夠合理地布置基陣的位置和選擇基陣的數量, 精確地測得方位角, LSM就能夠快速準確地計算出目標位置[9]。
2 仿真結果與分析
假設目標為一水面艦船, 利用不同基陣數目、算法和陣型對目標進行定位。根據三角陣大小變化分別進行仿真。
2.1 不同基陣數目對同一目標的定位
對于多基陣純方位目標跟蹤情形, 在跟蹤算法確定的前提下, 目標的跟蹤或定位精度不僅與所選擇的基陣數目有關, 還與目標和基陣間的相對位置有關, 因此如何動態選擇基陣具有非常重要的實際意義[10]。
假設目標位置為(2 000, 2 000), 基陣1位置為(1 000, 0), 基陣2位置為(0, 1 000), 基陣3位置為(0, 0), 基陣態勢圖如圖4所示。單基陣定向誤差設均值為0, 方差為3。利用基陣1和2對目標進行雙基陣定位, 基陣1、基陣2和基陣3對目標進行三基陣定位, 分別對同一目標進行多次采樣測量, 其仿真結果如圖5所示。圖中顯示了不同的基陣數對同一目標定位時的誤差。
由圖5可以明顯看出, 對于同一目標而言, 3個基陣定位誤差(1,2和3)要比2個基陣(1與2)定位的誤差小得多。根據數據融合理論, 定位基陣數越多對目標的定位越精確[7], 4個基陣對目標的定位精度要比3個基陣高。但是, 4個以上的基陣對目標的定位算法更為復雜、運算量更大,對目標跟蹤定位精度的提高意義不大。此外, 當網絡內對單一目標定位的基陣數增加時, 網絡維護的成本(時間)增加, 同時對單基陣對目標的解算時間、基陣間數據傳輸時間以及數據處理時間來說, 基陣越多時效性越差。所以, 對于網絡基陣并不意味著對目標的定位基陣數越多越好, 3個基陣就能夠實現對目標實時地跟蹤和定位。
三基陣按照不同的分布態勢對目標進行定位,其分布態勢如圖4和圖6所示。對目標的定位仿真結果如圖7所示。圖中顯示了3個基陣在不同態勢下對同一目標的定位誤差, 可知, 態勢二定位誤差要比態勢一定位誤差小。
當1和2不動,3從(0, 0)點開始沿45°方向朝目標點移動時, 三基陣定位誤差逐漸減小,如圖8所示。因此, 在大規模水下網絡定位時, 優先選用圖6分布態勢進行定位, 若目標正好處于2個基陣的連線上, 這時目標的定位精度最差[11]。
2.2 不同方法對同一目標的定位
假設目標位置為(2 000, 2 000), 基陣1初始位置為(1 000, 0), 基陣2初始位置為(0, 1 000), 基陣3初始位置為(1 000, 1 000), 為每個探測基陣隨機加入不同的方向角誤差, 測量點數為100, 基陣態勢如圖5所示。按照三基陣重心法、Jacobi迭代法和LSM分別進行計算定位誤差, 結果如表1所示。
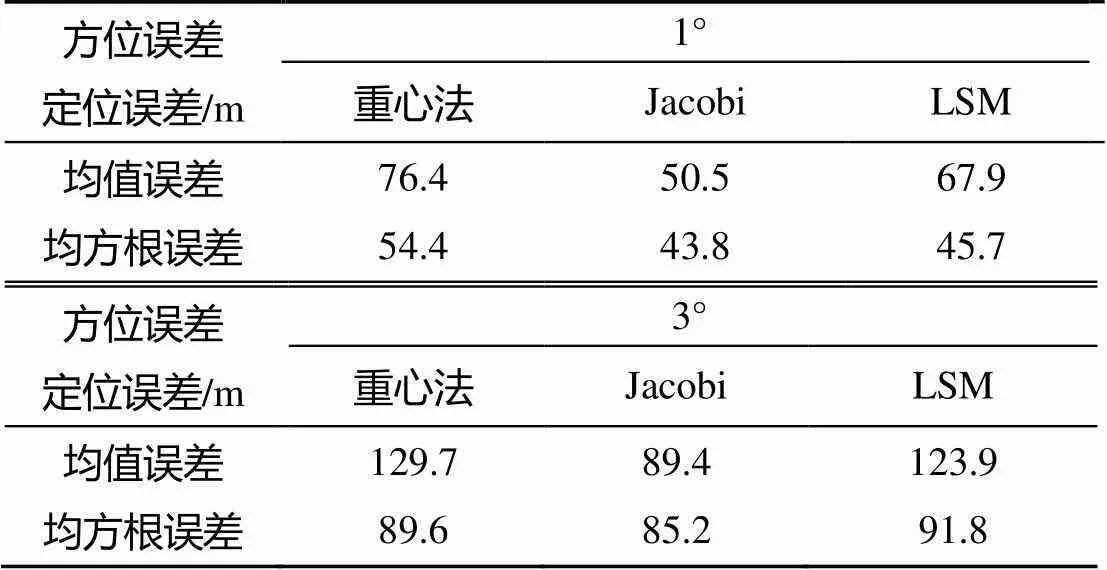
表1 不同定位方法誤差比對
由仿真結果可見, 對于同一陣型同一目標而言, 方向角誤差越小, 定位精度越高; 對于不同的定位方法而言, 重心法和LSM的定位誤差和均方根誤差均較大, Jacobi迭代法則最小。因此, 多基陣聯合定位時, 使用Jacobi迭代法其定位精度和收斂性要優于其他2種算法。
在工程實現中, 與其他2種定位方法相比, Jacobi迭代法代碼量較大, 運算時間較長, 對硬件資源需求較高。但是, 結合當前DSP芯片數據處理速度能力和Flash存儲容量, 該方法能夠實時實現。工程應用中由于Jacobi迭代法定位精度高, 是優先選擇的方法。
3 結束語
文中對分布式基陣純方位角聯合定位進行了仿真, 分析了3種不同定位方法在不同基陣數量以及不同布放態勢下的定位誤差, 提出了一種適用于水聲網絡的多基陣定位方法。從以上仿真結果可以看出:
1) 相同基陣不同算法對同一目標定位時, Jacobi迭代法誤差最小;
2) 基陣數量越大, 定位誤差越小。三基陣對目標的定位誤差小于雙基陣, 按照數據融合理論, 基陣越多定位誤差則越小。實際應用中考慮到定位算法復雜程度及運算量大小、各基陣的數據處理時間、基陣間的數據傳輸時間以及最后數據處理時間等因素會隨定位基陣數量增加而增加, 為了盡可能提高定位的時效性, 實現對目標跟蹤定位的實時性, 對單一目標的跟蹤定位基陣數不宜超過3個;
3) 基于水聲網絡對目標跟蹤還應有效解決網絡的生存能力和參數的快速精確估計等問題。結合目前水聲通信距離、單基陣對目標的探測距離、水聲網絡生存能力及未來水下武器自導能力等因素, 建議分布式基陣布放間距在1 000~1 500 m。各基陣間距過小, 對網絡的控制范圍有影響, 不利于水聲網絡大范圍聯合探測定位; 各基陣間距過大, 基陣間信息傳輸時延大, 網絡開銷也大, 對目標跟蹤定位的時效性差; 信息傳輸可靠性低, 基陣間距離增加, 信息傳輸過程中受干擾和基陣隱蔽性就會降低。
下一步工作將通過湖上試驗對定位算法進行進一步優化完善。
[1] 祝龍石, 莊志洪, 張清泰. 利用圓陣實現聲目標的全空域被動定位[J]. 聲學學報, 1999, 24(2): 204-209.Zhu Long-shi, Zhuang Zhi-hong, Zhang Qing-tai. An Omni-direction Passive Localization Technology of Acou- stic Target with Plane Circular Array[J]. Acta Acustica, 1999, 24(2): 204-209.
[2] 王昭, 李宏, 趙俊渭, 等. 空氣聲被動定位的誤差分析[J]. 應用聲學, 2000, 19(2):39-43. Wang Zhao, Li Hong, Zhao Jun-wei, et al. Error Analysis of Acoustic Passive Localization in the Air[J]. Applied Acoustic, 2000, 19(2): 39-43.
[3] 劉艷麗. 被動聲探測系統對目標定向、定位算法的研究[D] . 西安: 西北工業大學, 2006.
[4] 徐本連. 雙(多)基純方位目標定位與跟蹤算法研究[D]. 南京: 南京理工大學, 2006.
[5] 張安民. 純方位目標運動分析與魚雷智能導引律研究[D]. 西安: 西北工業大學, 2002.
[6] 杜選民, 姚藍. 多基陣聯合的無源純方位目標運動分析研究[J]. 聲學學報, 1999, 24(6): 604-610.Du Xuan-min, Yao Lan. Passive Bearings-only Target Mo- tion Analysis Based on Association of Multiple Arrays[J]. Acta Acustica, 1999, 24(6): 604-610.
[7] 關欣, 何友, 衣曉. 雙基陣純方位水下被動目標跟蹤性能仿真分析[J]. 系統仿真學報, 2003, 15(10): 1464-1466.Guan Xin, He You, Yi Xiao. Emulational Analysis on the Per- formance of Underwater Bearing-only Passive Target Track- ing Using Two Arrays[J]. Journal of System Simulation 2003, 15(10): 1464-1466.
[8] Landau B V, West W. Estimation of the Source Location and the Determination of the 50% Probability Zone for an Acoustic Source Locating System(SLS) Using Multiple Systems of 3 Sensors[J]. Applied Acoustics, 1997, 52(1): 85-100.
[9] Fan Z P, Ma J, Jiang Y P, et al. A Goal Programming Approach to Group Decision Making Based on Multiplicative Preference Relations[J]. European Journal of Operational Re- search, 2006, 174(1): 311-321.
[10] Kaplan L M.Node Selection for Target Tracking Using Bear- ing Measurements from Unattended Ground Sensors [C]// 2003 IEEE Aerospace Conference Proceedings. Piscat- away, NJ, USA: IEEE, 2003, 2137-2152.
[11] Kaplan L M.Transmission Range Control During Autonomous Node Selection for Wireless Sensor Networks[C]//2004 IEEE Aerospace Conference Proceedings. Piscataway, NJ, USA: IEEE, 2004, 2072-2087.
Simulation Analysis of Joint Localization Algorithm Based on Distributed Arrays
WANG Zhi-gang, CHEN Shao-hua, WANG Wei
(The 710 Research Institute, China Shipbuilding Industry Corporation, Yichang 443003, China)
A multi-array joint localization system has the performances of strong anti-interference and survivability, compared with the bearing-only target localization and tracking algorithm, which needs a large amount of calculation and is of poor real-time performance and low accuracy of localization and estimation. In this paper, a distributed arrays based on joint localization algorithm is proposed for underwater acoustic network. Simulation models of the localization methods of Jacobi iteration, triangular center of gravity, least square method(LSM) are presented. The simulation performances of three localization methods for different array numbers and distribution situations are analyzed and compared. Simulation results show that the Jacobi iteration method with tri-array can achieve better positioning accuracy and convergence performance than the other two methods. Furthermore, the suitable parameters of array layout, array numbers, and distances among arrays for distributed arrays joint localization are proposed to improve the target localizing performance and the network survivability. This study may provides a reference for engineering application of multi-array target positioning.
underwater target localization; distributed array; underwater acoustic network; bearing-only target localization; Jacobi iteration method; multi-array joint localization
TJ630.34; TB566; TN959.1
A
2096-3920(2018)05-0433-06
10.11993/j.issn.2096-3920.2018.05.009
2018-08-08;
2018-09-08.
國家重點研發計劃(2016YFC1400200).
王志剛(1980-), 男, 高級工程師, 主要研究方向為水下系統與網絡技術.
王志剛, 陳韶華, 王維. 分布式基陣聯合定位算法仿真分析[J]. 水下無人系統學報, 2018, 26(5): 433-438.
(責任編輯: 楊力軍)