基于迭代觀測更新濾波的單站無源定位算法
2019-09-02 12:27:16畢曉文陳安全
水下無人系統學報 2019年4期
熊 露, 諶 劍, 畢曉文, 陳安全
基于迭代觀測更新濾波的單站無源定位算法
熊 露1, 諶 劍2, 畢曉文1, 陳安全3
(1. 陸軍工程大學軍械士官學校 雷達系, 湖北 武漢, 430075; 2. 海軍工程大學 控制科學與工程博士后科研流動站, 湖北 武漢, 430033; 3. 海軍士官學校 信息與通信系, 安徽 蚌埠, 233012)
單站無源定位具有較強的隱蔽性, 能夠避免多個觀測平臺之間數據的融合與同步等問題。針對單站無源定位算法性能易受測量誤差一致性和初始狀態誤差等因素影響的問題, 文中從線性估計理論出發, 提出了一種基于迭代觀測更新濾波(IMUF)的單站無源定位算法。首先, 將經典的一步離散線性估計器觀測更新改寫為連續時間上的逐步更新過程, 推導了連續逐步狀態及其誤差矩陣的演化方程, 然后進一步離散化得到迭代觀測更新方程, 并采用Sigma點方法對其中的高斯矩進行近似計算, 得到了一種具有類似Kalman濾波運算形式, 適用于單站無源定位問題的迭代觀測更新濾波算法。仿真試驗證明, 較之傳統算法, 該算法能夠有效處理非一致性觀測誤差和大初始狀態誤差下的性能惡化問題, 在濾波收斂性與估計準確性方面更有優勢。
單站無源定位; 迭代觀測更新濾波; 線性估計器; Sigma點方法
0 引言
單站無源定位僅采用一個觀測平臺對目標進行定位跟蹤, 其本身不向外輻射能量, 具有較強的隱蔽性, 避免了多個觀測平臺之間數據的融合與同步等問題。非線性濾波算法是單站無源定位的關鍵技術之一, 但由于觀測模型可觀測性弱, 此時觀測噪聲尺度差異、初始條件誤差較大等原因容易導致算法定位誤差增大、收斂性下降甚至估計結果發散, 因此尋求一種定位精度高、收斂速度快、性能穩定的濾波算法是單站無源定位技術需要解決的一個核心問題[1]。
經典的擴展卡爾曼濾波(extended Karman filter, EKF)算法通過對非線性方程進行1階Taylor級數展開來逼近真實的狀態分布, 當模型非線性較強時可能導致濾波性能不穩定甚至結果發散[2]。Sigma點類算法[3-4]通過采用一組確定的加權采樣點來捕獲高斯隨機變量經過非線性變換后的均值和方差, 一方面避免了EKF在系統模型較為復雜時雅克比矩陣難于求解的問題; 另一方面其結果能夠匹配到對應的真值Taylor展開項的第2階(second order), 在適合的初始條件下相比EKF提高了高斯矩近似精度, 但在先驗誤差增大時則容易產生非局部采樣效應(non- local sampling effect)[5-6], 導致濾波性能不穩定, 參數調諧困難[7]。此外在多傳感源條件下, 當觀測噪聲呈現較大量級差異時將可能導致非線性條件下的高斯假設失效, 從而造成濾波性能惡化[8-10]。
針對上述問題, 文中從基本的線性估計理論出發, 將離散線性估計器一步觀測更新改寫為連續(偽)時間上的逐步更新過程, 推導了連續逐步狀態及其誤差矩陣的演化方程, 并進一步通過對其離散化后應用Sigma點矩近似方法, 得到了一種新的迭代觀測更新算法。通過與經典方法的仿真對比試驗表明, 迭代觀測更新濾波算法能夠有效處理非一致性觀測誤差和大初始狀態誤差下的性能下降問題, 具有更佳的濾波收斂性與估計準確性; 且算法實現結構與經典Kalman濾波器相似, 具有較好的可行性。
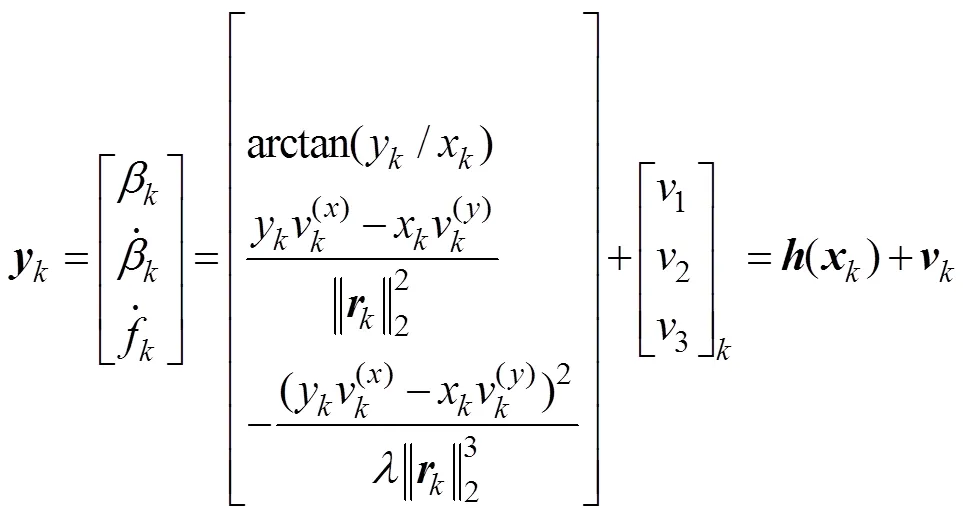
1 單站無源定位問題狀態空間描述

其中,
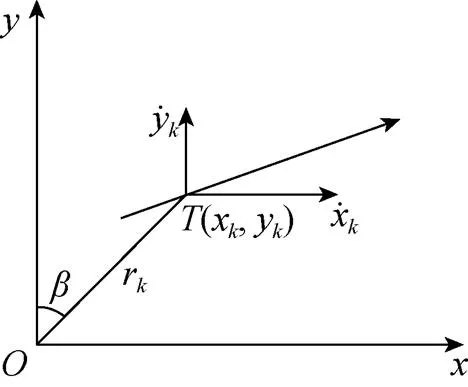
圖1 觀測站與目標輻射源位置關系示意圖
式(1)中噪聲增益項為
通過將跟蹤問題系統抽象為基于狀態空間模型描述的濾波估值問題, 即可采用濾波算法對狀態進行遞推估計, 從而實現實時單站無源定位。
2 迭代更新濾波算法設計
線性估計將估計值看作是觀測值的線性函數, 此時問題等效為找到如下估計值

根據無偏性要求可得

其中
則根據式(5)可得

且可得線型最小均方差(linear minimum me- an square error, LMMSE)估計器的MSE矩陣






注意到對于線性估計器, 根據連續時間濾波理論[12]可近似有




3 數值仿真與分析
為了檢驗 IMUF算法的性能, 將其與經典的EKF、無損卡爾曼濾波(unscented Kalman filter, UKF)以及容積卡爾曼濾波(cubature Kalman filter, CKF)算法進行計算機仿真試驗, 利用這3種方法為IMUF提供濾波性能參考[14-15], 并對比所得的數值結果。
根據上述設置, 得初始狀態及誤差矩陣分別為

從圖2中可見, 當初始條件設置與實際情況誤差較小時, 文中提出的IMUF算法與UKF和CKF算法相當并略優于兩者; 而從圖3中則可看出, IMUF在處理大初始條件誤差時能夠快速收斂, 且收斂至穩定時的性能要明顯優于UKF和CKF算法; 對于文中的無源定位問題, 由于實際情況中一般難以根據觀測數據直接推算初始位置, 故IMUF更實用。同時可注意到, 由于觀測模型具有較強的非線性, 基于1階近似的EKF算法在2種初始誤差條件下均給出了較差的估計結果。
圖4~5分別給出了在狀態模型中引入目標機動時, 在初始條件I和II下位置和速度估計的RRMSE, 可見目標機動對于各個濾波器的性能都造成了較大影響, 但文中算法在各個條件下均保持了良好的收斂性, 且整體誤差顯著低于其他幾種典型方法。
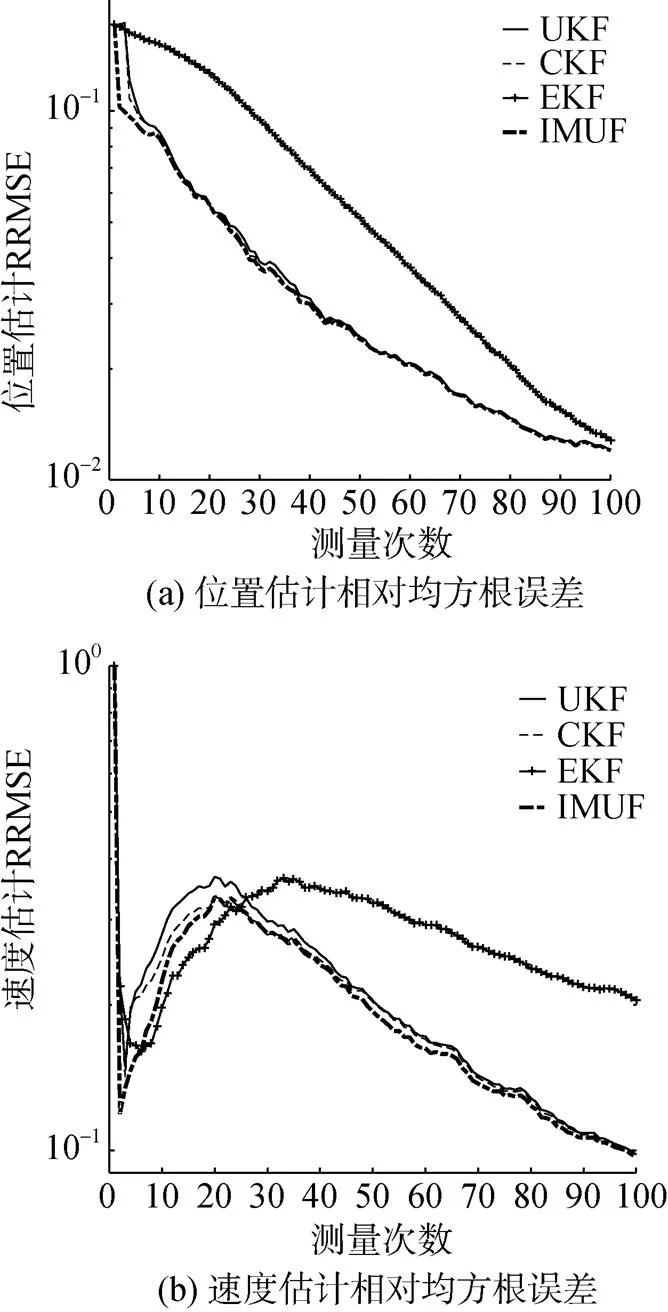
圖2 初始條件I下位置與速度估計相對均方根誤差
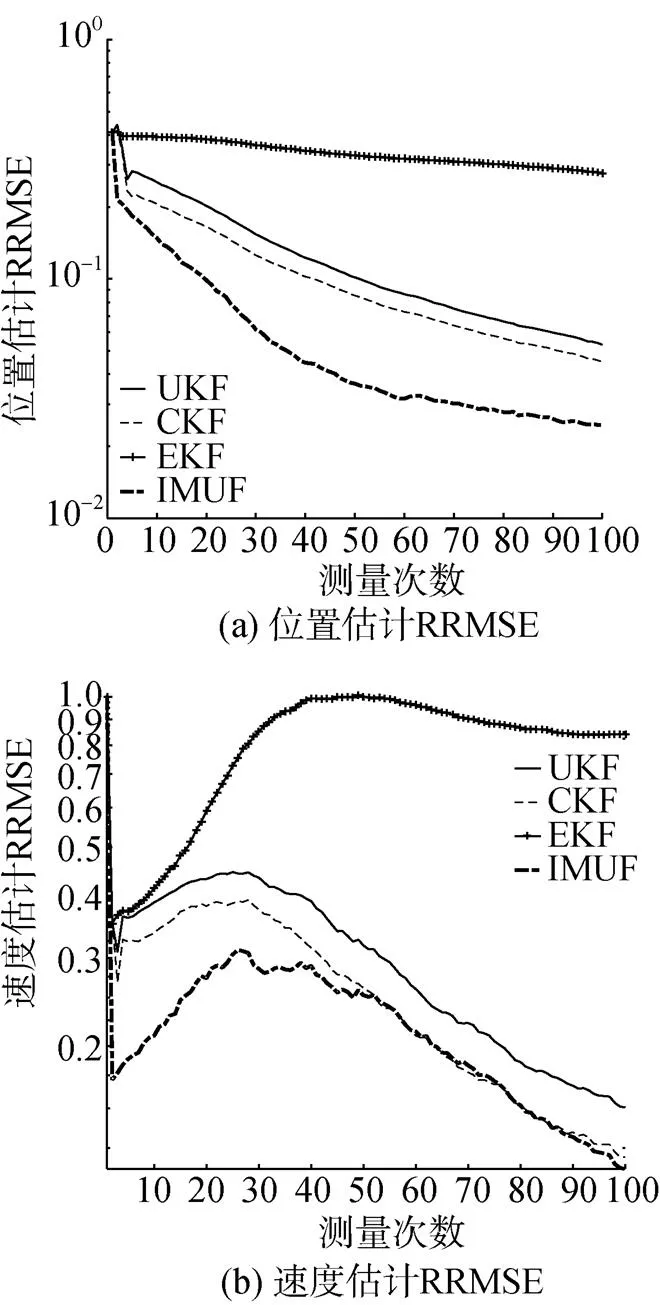
圖3 初始條件II下位置與速度估計RRMSE
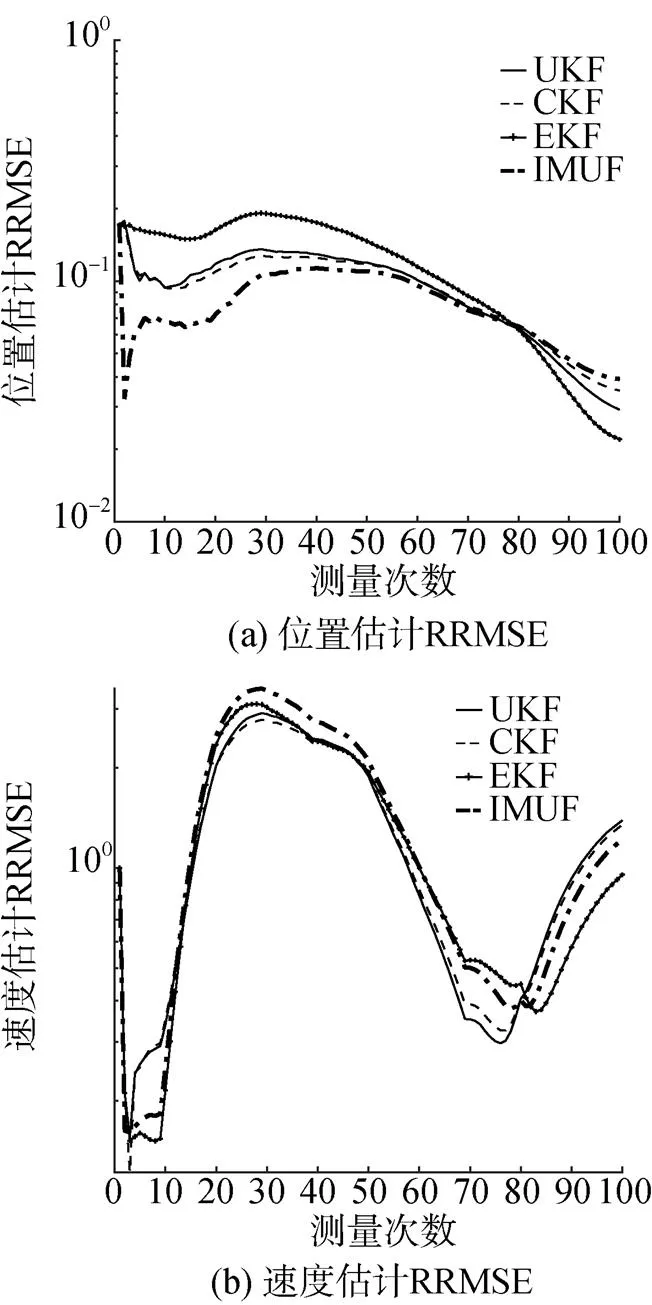
圖4 目標機動時初始條件I下位置與速度估計RRMSE
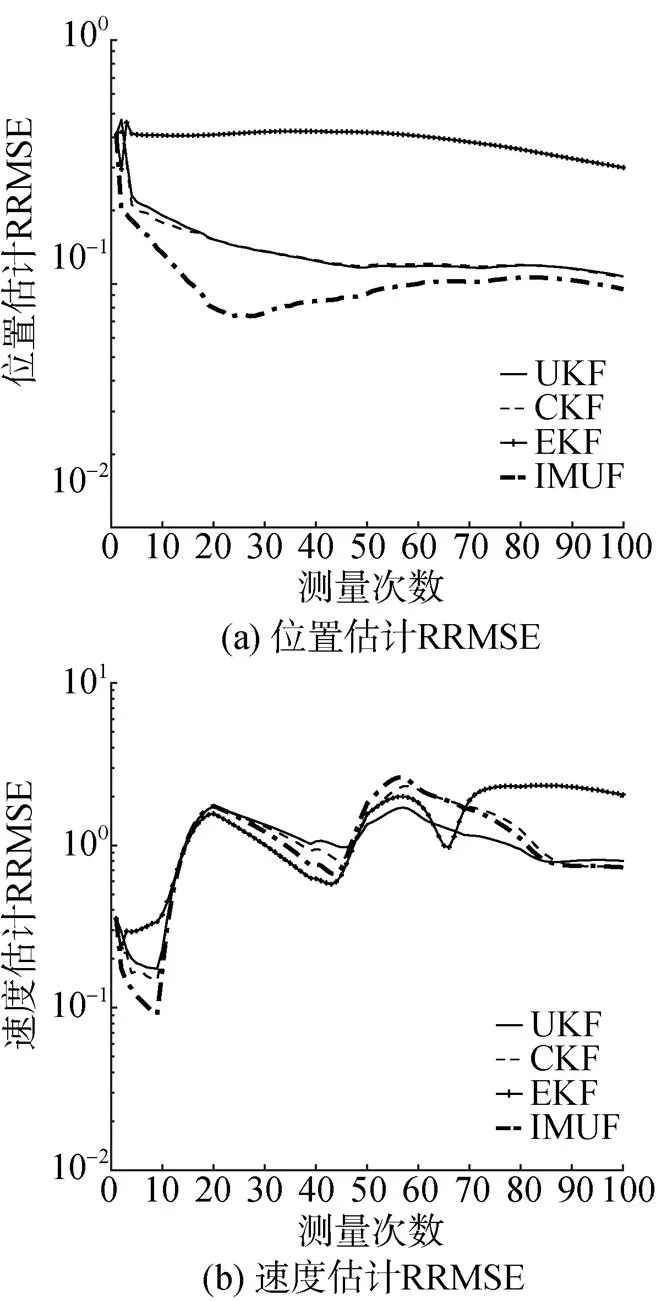
圖5 目標機動時初始條件II下位置與速度估計RRMSE
4 結束語
文中提出了一種應用于單站無源跟蹤的迭代觀測更新濾波算法。將經典的一步離散線性估計器觀測更新改寫為連續時間上的逐步更新過程, 推導了連續逐步狀態演化規律, 并進一步離散化得到了實用迭代觀測更新算法。通過與經典方法的仿真對比試驗表明, 迭代觀測更新濾波算法具有更好的收斂性與穩定性, 以及更佳的濾波準確性; 且算法實現結構與經典Kalman濾波器相似, 具有較好的可行性。同時該算法也適用于其他非線性濾波領域, 對工程實踐具有一定的現實意義。下一步的研究方向應集中在更為廣泛的算法應用以及降低由于迭代導致的復雜度增長。
[1] 孫仲康, 郭福成, 馮道旺, 等. 單站無源定位跟蹤技術[M]. 北京: 國防工業出版社, 2008.
[2] Shalom Y, Li X R, Thiagalingam K. Estimation with Applications to Tracking and Navigation[M]. New York: Wiley, 2001: 381-394.
[3] Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[4] Rudolph M. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models[D]. Oregon: Oregon Health & Science University, 2004: 251-256.
[5] Garcia-Fernandez A F, Morelande M R, Grajal J. Truncated Unscented Kalman Filtering[J]. IEEE Transactions on Signal Processing, 2012, 60(7): 3372-3386.
[6] Chang L, Hu B, Li A, et al. Transformed Unscented Kalman Filter[J]. IEEE Transactions on Automatic Control, 2013, 58(1): 252-257.
[7] Gustafsson F, Hendeby G. Some Relations Between Extened Kalman Filter and Unscented Kalman Filter[J]. IEEE Transactions on Signal Processing, 2013, 60(2): 545-555.
[8] Zanetti R. Adaptable Recursive Update Filter[J]. Journal of Guidance Control & Dynamics, 2015, 38(7): 1-5.
[9] Perea L, How J, Breger L. Nonlinearity in Sensor Fusion: Divergence Issues in EKF, Modified Truncated SOF, and UKF[C]//Proceedings of AIAA Conference of Guidance, Navigation, and Control, South Carolina, USA: IEEE, 2007: 3489-3499.
[10] Morelande M R, Garcia-Fernandez A F. Analysis of Kalman Filter Approximations for Nonlinear Measurements[J]. IEEE Transactions on Signal Processing, 2013, 61(12): 5477-5484.
[11] 李宗華, 肖予欽, 周一宇, 等. 利用頻域和空域信息的單站無源定位跟蹤算法[J]. 系統工程與電子技術, 2004, 26(5): 613-616.Li Zong-hua, Xiao Yu-qing, Zhou Yi-yu, et al. Single Station Localization Algorithm for Source Free Targets Using Frequent and Spatial Information[J]. System Engineering and Electronic Technology, 2004, 26(5): 613-616.
[12] Jazwinski A. Stochastic Process and Filtering Theory[M]. New York: Academic Press, 1970.
[13] Sarkka S. On Unscented Kalman Filtering for State Estimation of Continuous-Time Nonlinear Systems[J]. IEEE Transactions on Automatic Control, 2007, 52(9): 1631- 1641.
[14] 袁罡, 陳鯨. 基于UKF的單站無源定位與跟蹤算法[J]. 電子與信息學報, 2008, 30(9): 2120-2123.Yuan Gang, Chen Jing. Single Station Localization and Tracking Algorithm for Source Free Targets Based on UKF[J]. Journal of Electronics and Information, 2008, 30(9): 2120-2123.
[15] 胡振濤, 張勇, 劉先省. 基于量測迭代更新集合卡爾曼濾波的機動目標跟蹤算法[J]. 控制理論與應用, 2014, 31(11): 1517-1523. Hu Zhen-tao, Zhang Yong, Liu Xian-xing. Maneuver Target Tracking Algorithm Based on Iterated Measurement Updated Ensemble Kalman Filter[J]. Control Theory & Application, 2014, 31(11): 1517-1523.
Single Observer Passive Localization Algorithm Based on Iterated Measurement Updating Filter
XIONG Lu1, SHEN Jian2, BI Xiao-wen1, CHEN An-quan3
(1. Department of Radar System, Ordnance NCO Academy of Army Engineering University of PLA, Wuhan 430075, China; 2. Post-doctoral Program on Control Science and Engineering, Naval University of Engineering, Wuhan 430033, China; 3. Department of Information & Communication, NCO Academy of PLA Navy, Bengbu 233012, China)
Single observer passive localization has strong concealment performance, and can avoid the problem of data fusion and synchronization among multiple observing platforms. To address the performance degeneration of single observer passive localization affected by the factors such as measurement error consistency and initial state error, a single observer passive localization algorithm based on iterated measurement updating filter(IMUF) is proposed in this paper. Firstly, based on the theory of linear estimation, the classical one-step discrete linear estimator update is rewritten as the step-by-step updating process in continuous time. Secondly, the evolution equations of continuous stepwise state and its error matrix are deduced and the iterated measurement updating equation is obtained by discretization. And then, the Sigma point method are used to approximate calculate the Gaussian matrix included in updating equations, and the IMUF is obtained, which has the Kalman filter-like computation form and is suitable for single observer passive localization. Finally, compared with the classical method, the experimental results show that the IMUF algorithm can effectively deal with the performance degradation problem under non-uniform measurement error and large initial state error, with better filtering convergence and estimation accuracy.
single observer passive localization; iteratedmeasurement updating filter(IMUF); linear estimator; Sigma point method
TJ630.34; TN713
A
2096-3920(2019)04-0406-07
10.11993/j.issn.2096-3920.2019.04.007
熊露,諶劍,畢曉文,等.基于迭代觀測更新濾波的單站無源定位算法[J].水下無人系統學報, 2019, 27(4): 406-412.
2016-11-19;
2016-12-18.
海軍工程大學科研基金(20180795); 中國博士后科學基金(2018M643864).
熊 露(1986-), 女, 博士, 講師, 主要研究方向為目標探測與跟蹤.
(責任編輯: 陳 曦)