一種簡易機械式菠蘿采摘裝置設計
2018-10-26 01:42:24朱義燈胡利波宋金波
時代農機 2018年8期
關鍵詞:示意圖
朱義燈,胡利波,宋金波
(江西制造職業技術學院,江西 南昌 330095)
目前國內外菠蘿采收作業主要以人工采摘,僅利用運送機械實現輔助搬送和運輸。菠蘿的采收是一項繁重的工作,如何實現菠蘿的機械化采摘變得尤為重要。由于菠蘿采摘季節性很強,每次果實收獲的高峰期通常只有半個月左右,人工采摘短期內需要大量人力。采收時,果農戴上手套,根據果實大小和選準顏色后,用果刀切割。研究開發菠蘿輔助采摘設備,對于緩解勞動力短缺,穩定采摘作業質量,減輕勞動強度,提高采摘生產效率有重要意義。
1 菠蘿采摘機械結構設計
1.1 固定裝置
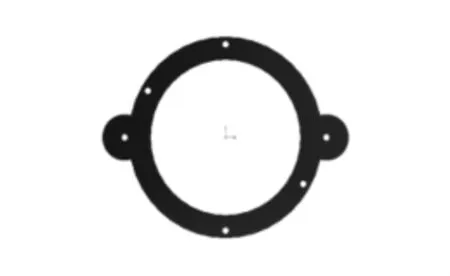
圖1 支撐板示意圖

圖2 固定管示意圖
在采摘菠蘿時采用重量較輕的不銹鋼固定裝置:支撐板(如圖1所示)和四根不銹鋼固定管(如圖2所示)組成,支撐板規格采用外直徑為260 mm,內直徑為200 mm,與4根固定管相連接。
1.2 動力裝置
通過對握力把手(如圖3所示)的按壓作用,將人手上的力傳遞給鋼絲繩,帶動切割鐮刀運動,為鐮刀提供動力來源,而且握力把手有杠桿作用,可以實現省力。
1.3 剪切裝置
菠蘿果實的剪切方式采用切割鐮刀式,其形狀如圖4所示,通過鋼絲繩的拉力作用,實現鐮刀的運動,從而達到切割菠蘿果實的目的。

圖3 握力把手示意圖

圖4 切割鐮刀示意圖
(1)復位裝置。本裝置采用扭力彈簧(如圖5所示)進行復位,切割鐮刀運動時會拉動扭力彈簧;當動力裝置撤銷后,扭力彈簧會帶動切割鐮刀自動復位。
(2)簡易機械式菠蘿采摘裝置結構圖。簡易機械式菠蘿采摘裝置結構由:切割鐮刀、把手固定件、橫桿、支桿與橫桿連接件、握把、支桿、彎管與支桿連接件、彎管、鋼絲及外套、底環、切割鐮刀等組成,其結構如圖6所示。

圖5 扭力彈簧示意圖

圖6 菠蘿采摘裝置結構示意圖
3 UG力學仿真
圖7和圖8是UG軟件對關鍵零件切割鐮刀和握力把手受力仿真分析結果。圖7切割鐮刀應力分布情況,應力分布主要集中在鐮刀把手與鋼絲繩接觸的地方,裝置工作時握力把手帶動鋼絲繩拉動鐮刀,從而對菠蘿莖進行切割。握力把手應力分布主要集中在把手孔與鋼絲接觸處如圖8。
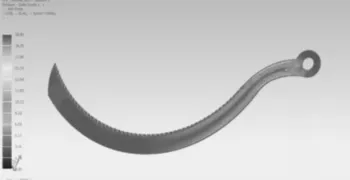
圖7 切割鐮刀應力分布
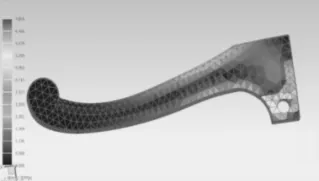
圖8 握力把手應力分布
4 結語
(1)簡易機械式菠蘿采摘裝置操作簡單,設計結構緊湊,便于菠蘿采摘,滿足人因工程學。
(2)剪切鐮刀UG仿真結果表明:應力分布主要集中在剪切鐮刀把手與鋼絲接觸處,強度滿足設計要求。
(3)握力把手UG仿真結果表明:應力分布主要集中在握力把手與鋼絲繩接觸處,強度滿足設計要求。
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
娃娃樂園·3-7歲綜合智能(2016年1期)2016-10-25 09:32:48
中國共青團(2015年7期)2015-12-17 01:24:38
中學生數理化·八年級物理人教版(2014年1期)2015-01-09 08:50:45
中國扶貧(2014年8期)2014-06-27 15:33:39
中國扶貧(2014年8期)2014-06-27 04:09:02
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44
能源(2014年3期)2014-03-27 09:55:20