智能汽車的激光雷達標定
2018-10-21 21:13:25郭小蘭
科學導報·學術 2018年13期
郭小蘭
摘要:智能汽車就是在普通車輛的基礎上增加先進的傳感器,比如雷達、控制器、執行器等裝置,通過車載傳感系統和信息終端實現與人、車、路等的智能信息交換使汽車具備智能的環境感知能力。本文概述了激光雷達外部安裝參數的標定以及單個激光雷達數據的數據轉換,為激光雷達標定的進一步研究提供參考。
關鍵詞:智能汽車,激光雷達,參數標定
【中圖分類號】G718.5
【文獻標識碼】B
【文章編號】2236-1879(2018)13-0185-01
激光雷達與車體為剛性連接,兩者間的相對姿態和位移固定不變。為了建立各個激光雷達之間的相對坐標關系。需要對激光雷達的安裝進行簡單的標定,并將激光雷達數據從激光雷達坐標系統轉換至車體坐標系上。
1.激光雷達外部安裝參數的標定
激光雷達外部安裝參數的標定通常采用等腰直角三角標定板和正方形標定板來完成。需要標定的激光雷達的安裝參數為激光雷達的俯仰角與側傾角。
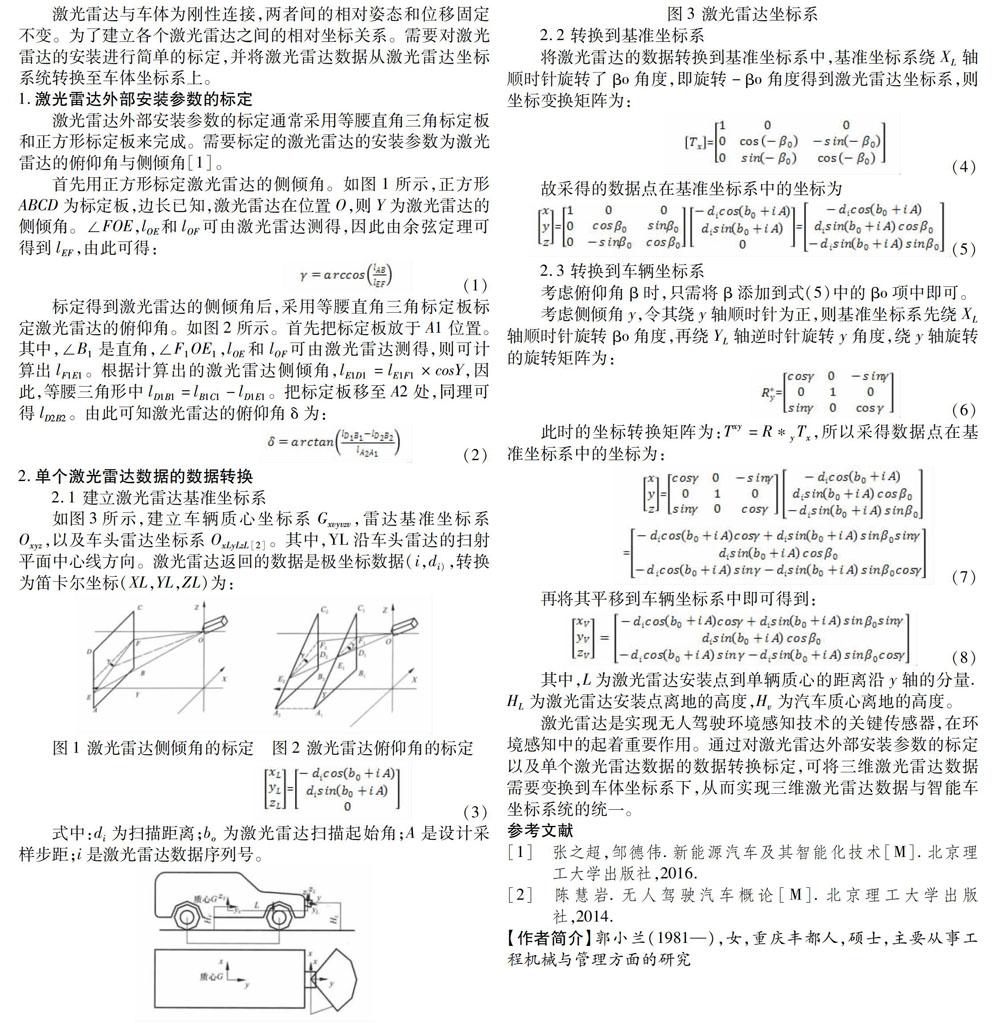
首先用正方形標定激光雷達的側傾角。如圖1所示,正方形ABCD為標定板,邊長已知,激光雷達在位置O,則Y為激光雷達的側傾角。∠FOE,LOE和LOF可由激光雷達測得,因此由余弦定理可得到∠EF,由此可得:
標定得到激光雷達的側傾角后,采用等腰直角三角標定板標定激光雷達的俯仰角。如圖2所示。首先把標定板放于Al位置。其中,∠B1是直角,∠F1OE1,LOE和LOF可由激光雷達測得,則可計算出∠FlEl。根據計算出的激光雷達側傾角,∠RD1=LEIF1×cosy,因此,等腰三角形中∠DIBl=∠BICl-∠DIE1。把標定板移至42處,同理可得LD282。由此可知激光雷達的俯仰角δ為:
2.單個激光雷達數據的數據轉換
2.1建立激光雷達基準坐標系
如圖3所示,建立車輛質心坐標系Gxvyvzv,雷達基準坐標系,以及車頭雷達坐標系O。其中,YL沿車頭雷達的掃射平面中心線方向。激光雷達返回的數據是極坐標數據(i,d、轉換為笛卡爾坐標(X,YL,ZL)為:
圖1激光雷達側傾角的標定圖2激光雷達俯仰角的標定
式中:di為掃描距離;bn為激光雷達掃描起始角;A是設計采樣步距;i是激光雷達數據序列號。
2.2轉換到基準坐標系
將激光雷達的數據轉換到基準坐標系中,基準坐標系繞X軸順時針旋轉了Bo角度,即旋轉-Bo角度得到激光雷達坐標系,則坐標變換矩陣為:
故采得的數據點在基準坐標系中的坐標為
2.3轉換到車輛坐標系
考慮俯仰角B時,只需將B添加到式(5)中的Bo項中即可。
考慮側傾角y,令其繞y軸順時針為正,則基準坐標系先繞XL軸順時針旋轉Bo角度,再繞YL軸逆時針旋轉y角度,繞y軸旋轉的旋轉矩陣為:
此時的坐標轉換矩陣為:TWY=R*YTx,所以采得數據點在基準坐標系中的坐標為:
再將其平移到車輛坐標系中即可得到:
其中,L為激光雷達安裝點到單輛質心的距離沿y軸的分量.HL為激光雷達安裝點離地的高度,Hn為汽車質心離地的高度。
激光雷達是實現無人駕駛環境感知技術的關鍵傳感器,在環境感知中的起著重要作用。通過對激光雷達外部安裝參數的標定以及單個激光雷達數據的數據轉換標定,可將三維激光雷達數據需要變換到車體坐標系下,從而實現三維激光雷達數據與智能車坐標系統的統一。
參考文獻
[1]張之超,鄒德偉.新能源汽車及其智能化技術[M].北京理工大學出版社,2016.
[2]陳慧巖.無人駕駛汽車概論[M].北京理工大學出版社,2014.
