太陽能板自動清洗機器人
2018-10-16 07:31:42陸定超陳嘉齊李金鵬賈淳翔
機電產(chǎn)品開發(fā)與創(chuàng)新 2018年5期
陸定超,陳嘉齊,盧 琳,李金鵬,賈淳翔
(沈陽城市建設學院 交通與機械工程系,遼寧 沈陽 110167)
0 引言
人類的進步,都是以能源為基礎的,隨著社會的高速發(fā)展,傳統(tǒng)能源枯竭的趨勢日益明顯,太陽能作為一種取之不盡,用之不竭的新興能源,越來越受到重視。以及國內(nèi)對能源利用的轉(zhuǎn)型,使得光伏電站的建設力度也得到了增加。然而太陽能板常年工作在露天環(huán)境下,容易沾染灰塵,使得太陽能板的發(fā)電效率變低。目前對太陽能板的清洗方式還是人工清洗,由于光伏電站的占地面積巨大,人力組織一次清洗費時費力。另外,一些地處山坡等地的光伏電站,人工清洗不方便而且危險。因此出現(xiàn)清洗太陽能板的機器人,經(jīng)過調(diào)查發(fā)現(xiàn)大部分機器人的尺寸只針對一些特定大小的太陽能板進行清洗,無法適應不同面積大小的太陽能板。另外一些不受太陽能板尺寸限制的機器人,工作效率不高。本項目的研究目的便是制作一種機器人,在做到在適應不同規(guī)格太陽能板的同時還能提高工作效率。
1 機械結構設計
機器人的設計主要分成機械機構設計和程序設計兩個方向。為了方便制造,將結構設計分成兩大部分,一部分為行進機構,另一部分為清洗模塊。
1.1 行進機構
太陽能板的外形大部分屬于矩形,因此將機器人的運動方式分成互相垂直兩個方向上的兩軸運動。機器人的運動由兩部24V直流電機驅(qū)動,其中一部電機帶動整個機器人在太陽能板上的橫向水平運動,另外一部24V直流電機通過同步帶驅(qū)動清洗機構在機器人框架內(nèi)部的縱向移動。通過程序控制使得機器人按照規(guī)定的軌跡進行運動,達到機器人在太陽能板上清洗時運動的能力。
為了達到范圍內(nèi)自由伸縮的功能,利用5組導軌和滑塊以及型材組合實現(xiàn)。

圖1 收縮狀態(tài)Fig.1 The state of contraction

圖2 伸長狀態(tài)Fig.2 The state of elongation
1.2 清洗模塊
在產(chǎn)生相同電量的情況下,光伏電站的占地面積往往比普通的火力發(fā)電站所占的面積更大,因此為了滿足一定的裝機總量,巨大的占地面積使得光伏電站一般建在沙漠,山地,丘陵等環(huán)境下,而不同的環(huán)境對太陽能板表面的影響也不同。因此將清洗結構做成模塊化,可通過螺絲快速拆裝,以方便清洗不同環(huán)境下太陽能板表面不同的污漬。
在沙漠環(huán)境中,缺少水分,揚沙天氣繁多等因素,使得太陽能板表面的污漬大部分屬于沙子等細小顆粒。只需要輕微的擦拭就可以除去灰塵,因此清洗模塊可以是帶有毛刷輥的裝置。
在山地,丘陵等地,相對充沛的雨水,霧霾天氣以及個別距離城區(qū)較近的地區(qū),城市建筑粉塵對太陽能板的共同作用,使得表面的污漬大多是結塊狀的斑點積灰。單一的毛刷輥結構難以清洗干凈太陽能表面,因此清洗模塊可以是以水為主,毛刷輥為輔的復合清洗裝置。
另外在經(jīng)費,技術允許的條件下,可以將清洗模塊做成類似吸塵器,靜電除塵機等裝置。
2 程序設計
Arduino作為一種被廣泛被使用的單片機,其上手簡單,因而以它為基礎,對整個機器人的運動進行控制。
分析機器人行走路線,此處所描述的路線即清洗模塊的行進軌跡,在太陽能板上建立10×10的XY坐標軸,以清洗模塊的中心為準,清洗模塊走的軌跡如下:
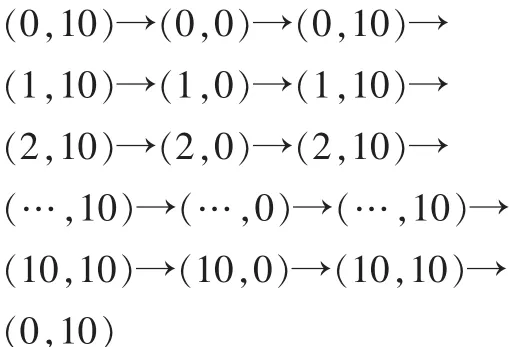
機器人運動順序以及程序的設計:
(1)清洗模塊開始工作。
(2)此時整個機器人在太陽能板的左上角開始運作,內(nèi)部的清洗模塊向下行進,當安裝在滑臺最下側的光電傳感器接收到一個信號 (即清洗模塊到達了太陽能板的最下方),電機2開始反轉(zhuǎn),使清洗模塊向之前的反方向運動回來,直到安裝在滑臺最上方的光電傳感器接收到不同的信號(即清洗模塊到達了太陽能板的最上方)。此時太陽能板的最左側一條寬度與清洗模塊左右寬度相似的區(qū)域便清洗完成。
(3)完成2中的步驟之后,電機2停止運作,即保持整個機器人靠在太陽能板的左側。此時電機1開始正轉(zhuǎn),使得整個機器人向右行進,通過設置延遲子程序使得電機1轉(zhuǎn)動一段時間。當走過的距離和清洗模塊的左右寬度相同時,電機1停止轉(zhuǎn)動。
(4)將步驟2與步驟3寫成一個循環(huán)程序,循環(huán)執(zhí)行。
(5)當整個機器人走到太陽能板的最右側的時候,安裝在機器人最右側的光電傳感器接收到信號,電機1停止轉(zhuǎn)動。再執(zhí)行一次步驟3,清洗模塊對整個太陽能板的清洗結束,清洗模塊返回初始點并停止工作。
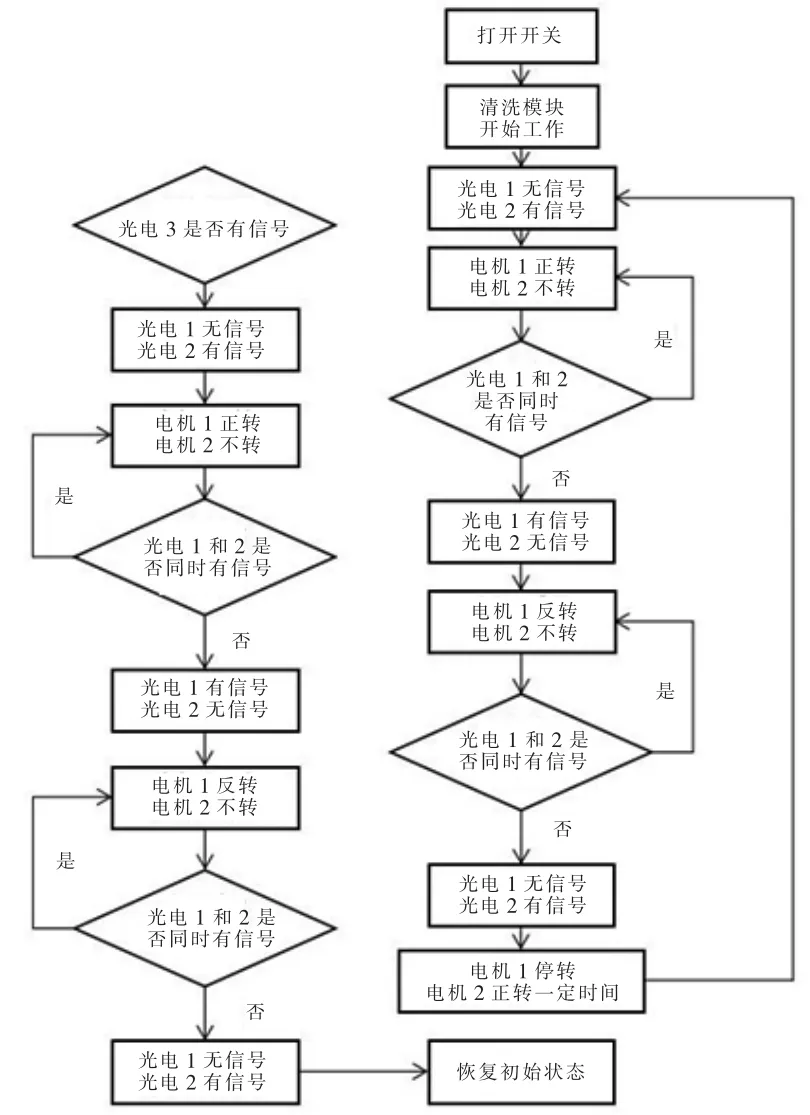
圖3 程序流程圖Fig.3 Program flow chart
3 材料的選用
太陽能板的表面材質(zhì)為玻璃,機器人的重量不能太重。行進機構的是基于兩個互相垂直的兩軸運動來設計的,所以大體的框架多為矩形。考慮以上兩點因素,采用2020型材是個非常不錯的選擇。型材的強度能夠保證承受住裝置上的重量而不變形,另外型材可以通過角件很方便的搭建想要的結構。
清洗模塊想要在機器人內(nèi)部運作就需要借助移動平臺,而平臺的移動就要用到滑塊與導軌。考慮到框架搭建選用的是2020型材,為了組合安裝方便因此選擇寬度為28mm的直線導軌。滑塊則選擇與導軌相配套的內(nèi)置雙軸心滾輪滑塊,該滑塊上的滑輪并不固定在一條直線上,相互偏置的滾輪方便滑塊進出導軌,并且使滑塊在導軌內(nèi)運行更加平穩(wěn)。另外滑塊上帶有緊鎖裝置,能在一些位置對滑塊進行固定。
傳動帶尺寸大小的選擇也盡量的和型材、導軌等相近。選擇單面齒10mm寬的XL型同步帶,另外選擇與之相匹配的各種直徑的同步輪。
4 結論
經(jīng)過理論的計算和設計,制作了一個機器人。通過試驗證明,設計方案可行,機器人能實現(xiàn)在范圍內(nèi)自由伸縮的功能。經(jīng)過程序的控制,機器人能按設計的軌跡進行運動。
