基于等效元素法的機電作動器傳動機構動力學建模與分析
2018-10-15 05:28:40段小帥
導航定位與授時 2018年5期
關鍵詞:系統
劉 海,段小帥,黃 建
(北京自動化控制設備研究所,北京 100074)
0 引言
目前,機電作動器因其體積小、輸出功率大、控制精度高等優點,廣泛應用于運載火箭、導彈、衛星、智能彈藥等控制領域,成為火箭推力矢量控制、飛行器翼面等的主要執行機構[1-2]。隨著軍事現代化的發展,飛行器的飛行速度日益加快,超高音速的飛行器對其伺服機構也提出了高動態響應、高剛度、高承載等嚴格要求[3-4]。此時,機電作動器設計只考慮機構運動學已不夠全面,動力學分析已成為不可忽視的一項內容。機電作動器動力學分析屬于多剛體動力學分析范疇,常規的算法大多采用牛頓-歐拉方法、拉格朗日法、羅伯森-維滕伯格方法、凱恩方法以及休斯敦法[5]。由于機電作動器傳動機構剛體數目多、傳動鏈長、連接約束多,用常規算法建立方程不僅工作量大,而且不便于計算機求解。
本文引入集中質量等效元素法,建立機電作動器的動力學解析模型,并根據工作需求,在ADAMS平臺進行虛擬樣機動力學逆求解仿真[6],開展機電作動器系統動力學研究。
1 動力學模型
1.1 機電作動器傳動機構
機電作動器的傳動機構以諧波減速器、行星減速器和滾珠絲杠為主,滾珠絲杠以其傳動剛度高、結構尺寸緊湊、運動平穩等優點廣泛應用于電動伺服領域[7]。圖1所示為某機電作動器的傳動原理圖,傳動機構由齒輪減速器、滾珠絲杠以及連桿機構組成。
1.2 機電作動器動力學模型
集中質量等效元素法在一般系統動力學方法的基礎上,引入單元等效和等效系統集成的概念,實現了有限構件組成的復雜機械系統動力學建模[8-10]。
如圖1所示,將模型劃分為6個單元,其中3、4、5、6單元可直接向質心等效。1、2單元屬于桿件單元,如圖2所示,根據慣性等效原則,等效單元的慣性矩陣和原構件單元的慣性矩陣完全相同,將分布質量的構件凝聚到構件的兩端,得到其等效單元如式(1)、式(3)所示。
(1)
(2)
(3)
單元節點號和系統節點號之間的關聯矩陣Nm表達如下
(4)
根據關聯矩陣,以有限元方法對系統質量陣進行組裝得到等效系統質量Ms
(5)
系統等效力陣為
(6)
設置系統位移坐標ui(i=1,2,3,…,8),機電作動器系統為單自由度系統,設置系統廣義坐標為φ1
(7)
式中:zi為齒輪齒數(i=4,5,6);φ2為連桿與地面慣性坐標系x軸夾角;L0為滾珠絲杠導程。
將系統位移坐標ui對系統廣義坐標φ1求一次偏導得到一階雅克比矩陣,將系統位移坐標ui對系統廣義坐標φ1求二次偏導得到二階雅克比矩陣。
(8)
(9)
式中:c1=cosφ1,c2=cosφ2,s1=sinφ1,s2=sinφ2。
將系統等效質量陣Ms、系統等效力矩陣Fs、一階雅克比矩陣Tia、二階雅克比矩陣Tiab代入一般系統動力學方程得機電作動器系統動力學方程。
(10)
系統動力學方程求解有正、逆兩種方式,逆解方式是已知系統的運動軌跡、加速度、位移等運動學參量,求系統的載荷變化情況。本文在ADAMS中采用逆方式求解方式,輸入系統驅動位移,分析系統載荷動力學響應。
2 ADAMS平臺動力學仿真
基于UG和ADAMS協同仿真,建立機電作動器仿真實體模型如圖3所示。模型中將機電作動器殼體簡化為大地,忽略桿件連接中的銷軸,以轉動副替代。在ADAMS中按照表1所示對各個部件添加材料屬性,然后分別對部件添加約束條件,主要包括電機齒輪與惰輪間齒輪副、惰輪與絲杠齒輪間齒輪副、絲杠絲桿與絲杠螺母間螺旋副、絲杠螺母與連桿間圓柱副、連桿與輸出軸間轉動副、輸出軸與大地間轉動副以及相應的固定副。根據工作要求在輸出軸施加靜態力矩負載和慣性負載。
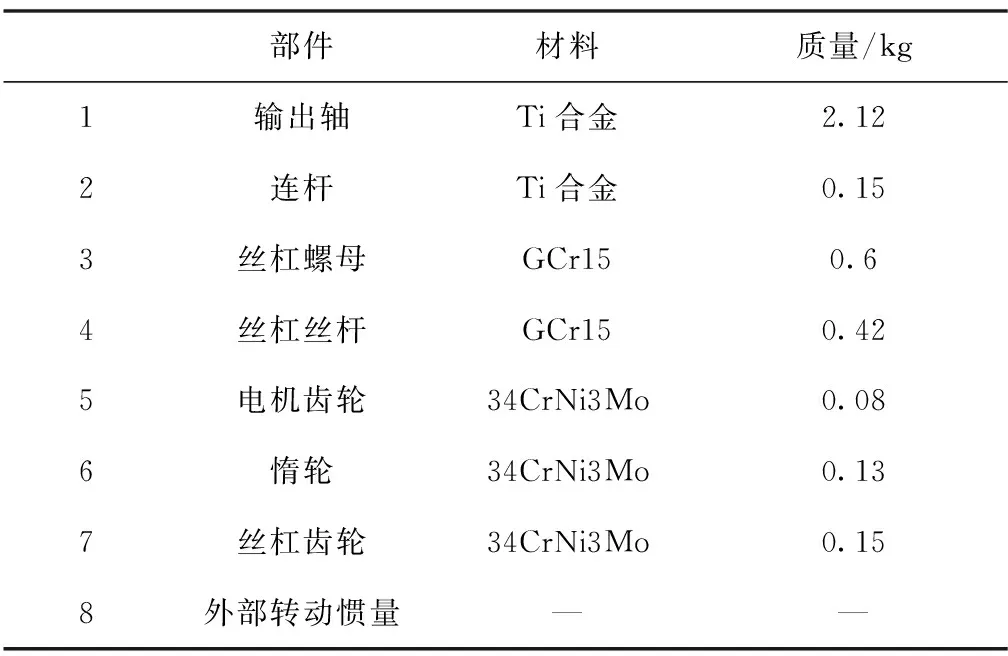
表1 部件材料屬性表
2.1 30°大行程位移信號仿真分析
30°位移信號是機電作動器輸出軸最大行程位移信號,為連續的+30°,0,-30°,0。當30°位移信號仿真時,改變機電作動器慣性負載工況,系統外部轉動慣量分別為0kg·m2、1kg·m2、2kg·m2、4kg·m2。分析外部轉動慣量對機電作動器伺服電機及減速部件滾珠絲杠的受載影響。在對30°極限位移信號進行仿真分析后,得到電機驅動力矩曲線如圖4所示。在0.15s和0.45s時,輸出軸分別轉到+30°和-30°最大行程,電機驅動力矩在這2個時刻達到極值。
提取圖中系統外部轉動慣量對應電機最大驅動力矩如表2所示。隨著系統外部轉動慣量由0增大至4kg·m2,電機最大驅動力矩逐漸增大,動載系數Kv由1增大到1.34。此時系統結構設計只考慮靜載已不滿足要求,電機負載應考慮由系統外部轉動慣量和自身傳動機構轉動慣量動載效應產生的附加載荷。
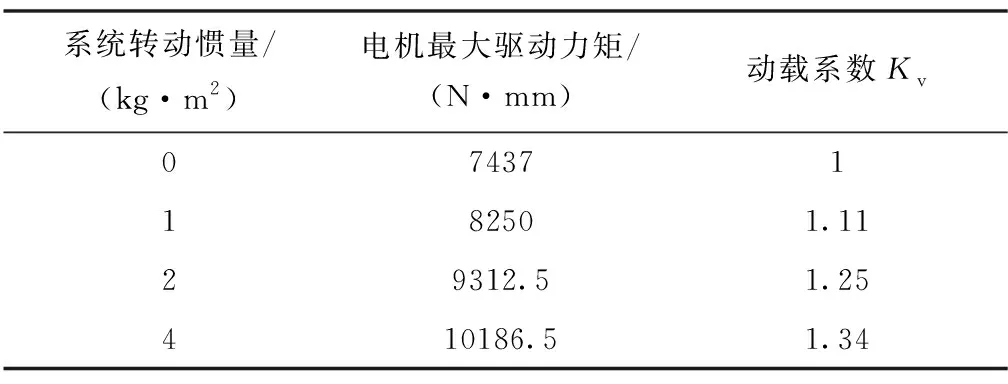
表2 電機最大驅動力矩
絲杠軸向推力曲線如圖5所示。
在0.6s的仿真周期內,絲杠軸向推力隨著輸出軸角度呈非線性變化,在0.15s和0.45s時達到極值。絲杠軸向力同樣隨著系統外部轉動慣量增大而明顯增大,當系統轉動慣量為4kg·m2時,絲杠軸向力為31676N,動載系數為1.55,如表3所示。絲杠負載應考慮由系統轉動慣量及動載效應產生的附加載荷。

表3 絲杠最大軸向推力
2.2 8Hz頻率特性仿真分析
在進行8Hz頻率特性仿真分析時,電機齒輪驅動函數為幅值為A,頻率為8Hz的正弦函數。通過改變驅動正弦函數幅值A,改變機電作動器系統加速度,得到不同系統加速度對應電機驅動力矩曲線如圖6所示。
提取不同驅動函數幅值A工況對應電機最大驅動力矩如表4所示。當將系統轉動慣量為0時,可認為無動載效應,動載系數為1;電機最大驅動力矩隨著驅動正弦函數幅值的增大而增大,動載系數Kv由1增大到1.23。分析表明,隨著系統工作高速化,此時系統結構設計只考慮靜載已不滿足要求,電機負載應考慮由系統加速度動載效應產生的附加載荷。
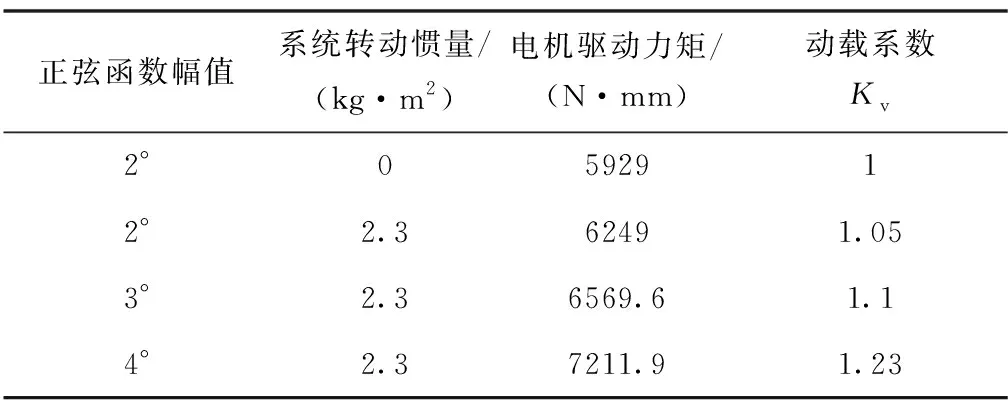
表4 電機最大驅動力矩
3 結論
1)通過引入規范化的動力學建模方法—集中質量等效元素法,分別建立機電作動器系統等效質量、系統等效力系,然后根據系統位移坐標與廣義坐標之間的雅克比關系,得到一階和二階雅克比矩陣,據此建立了機電作動器系統動力學方程。此種建模方法步驟規范,可操作性強,且易于計算機求解。
2)結合機電作動器系統動力學方程,在ADAMS平臺進行動力學逆求解,得到30°大行程位移信號和8Hz頻率信號兩種工況下系統載荷響應曲線。隨著負載轉動慣量增加,電機動載系數達到1.34,絲杠動載系數達到1.55;外部負載不變時,隨著驅動信號幅值增加,電機動載最大系數為1.23,表明隨著機電作動器系統外部慣性負載及系統運動速度的提高,由外部慣性負載及自身傳動機構產生的動載效應明顯,為機電作動器傳動機構優化設計提供了理論依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32