面向應(yīng)急需求的成像衛(wèi)星單任務(wù)綜合規(guī)劃
2018-09-27 11:37:06楊正磊鐘文冬任登高謝夏潔
系統(tǒng)工程與電子技術(shù) 2018年9期
楊正磊, 鐘文冬, 席 濤, 任 猛, 任登高, 謝夏潔
(1. 宇航動力學(xué)國家重點(diǎn)實(shí)驗(yàn)室, 陜西 西安 710043; 2. 西安衛(wèi)星測控中心, 陜西 西安 710043)
0 引 言
我國已逐漸建立起了自己的天基對地觀測系統(tǒng),可獲得可見光、多光譜、合成孔徑雷達(dá)(synthetic aperture radar,SAR)及紅外等多種類型的圖像,極大地提高了天基態(tài)勢感知能力。通過成像衛(wèi)星進(jìn)行對地觀測,已成為獲取情報信息的重要技術(shù)手段。早期,由于衛(wèi)星數(shù)量及其載荷能力有限,用戶需求相對較少,綜合規(guī)劃的問題并不突出,隨著衛(wèi)星種類、數(shù)量及用戶需求逐漸增加,特別在應(yīng)急條件下,應(yīng)用需求具有突發(fā)性和時效性要求高的特點(diǎn),如何就現(xiàn)有成像衛(wèi)星資源進(jìn)行綜合規(guī)劃,進(jìn)一步縮短響應(yīng)時間,已成為當(dāng)前成像衛(wèi)星系統(tǒng)運(yùn)用亟待解決的問題。
目前,類似問題的研究主要以成像衛(wèi)星任務(wù)規(guī)劃為背景,大致可分為單星成像調(diào)度問題和多星成像調(diào)度問題兩類[1-6],建立的模型包括混合整數(shù)規(guī)劃模型、0-1規(guī)劃模型、約束滿足問題模型、動態(tài)約束滿足問題模型、Petri網(wǎng)模型、基于圖論的模型等,模型的求解包括貪婪算法、混合整數(shù)規(guī)劃算法、啟發(fā)式算法及智能搜索算法等,模型大多選取以滿足任務(wù)需求綜合最優(yōu)或多個目標(biāo)為優(yōu)化目標(biāo)。針對應(yīng)急條件下任務(wù)規(guī)劃問題,相關(guān)文獻(xiàn)[7-8]研究了多星協(xié)同調(diào)度問題,并通過粒子群算法對建立的模型進(jìn)行求解等。然而,已有研究問題模型的建立大多以平時任務(wù)需求為背景,或只考慮了衛(wèi)星或綜合衛(wèi)星[9]、數(shù)傳資源的規(guī)劃。事實(shí)上,一方面,中繼衛(wèi)星[10]系統(tǒng)的逐步完善,對于低軌衛(wèi)星的覆蓋率理論上能達(dá)到100%,可大大縮短響應(yīng)時間,但目前一些成像衛(wèi)星并不具備中繼測控及數(shù)傳能力,只依靠中繼衛(wèi)星進(jìn)行任務(wù)響應(yīng)則需求不能面向所有在軌衛(wèi)星;另一方面,目前任務(wù)響應(yīng)時間的制約因素主要源于對系統(tǒng)間資源以“申請”為主的使用方式,但隨著測控運(yùn)控一體化的推進(jìn)與發(fā)展,系統(tǒng)間資源逐漸具備統(tǒng)一調(diào)度的能力。綜合以上兩方面原因,應(yīng)急條件下,考慮包括測控資源在內(nèi)的各類星地資源,盡可能地縮短任務(wù)需求響應(yīng)時間,進(jìn)行任務(wù)綜合規(guī)劃研究是有必要也有意義的。因此,本文的研究擬建立在各類星地資源均可進(jìn)行統(tǒng)一規(guī)劃的前提下,以應(yīng)急條件下成像衛(wèi)星任務(wù)規(guī)劃為背景,研究單個任務(wù)需求條件下綜合規(guī)劃問題,首先給出規(guī)劃要素及涉及約束的形式化描述,建立應(yīng)急條件下成像衛(wèi)星單任務(wù)規(guī)劃模型,在此基礎(chǔ)上,基于深度優(yōu)先搜索的思想進(jìn)行模型求解,最后通過算例分析進(jìn)行模型及算法的有效性驗(yàn)證。
1 問題分析
1.1 成像衛(wèi)星任務(wù)響應(yīng)過程分析
依據(jù)成像類型的不同,成像衛(wèi)星可分為可見光、紅外、多光譜及SAR成像衛(wèi)星等,典型的任務(wù)響應(yīng)過程如圖1所示,具體描述如下:
(1) 用戶根據(jù)需要提出任務(wù)需求;
(2) 運(yùn)控系統(tǒng)根據(jù)用戶提出的任務(wù)需求,制定衛(wèi)星工作和數(shù)據(jù)接收計(jì)劃,分別發(fā)往測控和運(yùn)控系統(tǒng);
(3) 測控系統(tǒng)根據(jù)衛(wèi)星工作計(jì)劃對衛(wèi)星進(jìn)行測控,以建立衛(wèi)星工作狀態(tài),衛(wèi)星適時進(jìn)行成像;
(4) 運(yùn)控系統(tǒng)根據(jù)數(shù)據(jù)接收計(jì)劃,分配數(shù)據(jù)接收站,并將接收到的數(shù)據(jù)發(fā)往應(yīng)用系統(tǒng);
(5) 應(yīng)用系統(tǒng)對數(shù)據(jù)進(jìn)行處理后發(fā)往用戶。
根據(jù)圖1的描述,成像衛(wèi)星的任務(wù)響應(yīng)過程基本上遵從接收任務(wù)需求-衛(wèi)星測控(建立工作狀態(tài))-成像-數(shù)據(jù)接收等幾個過程。涉及的要素包括用戶需求、衛(wèi)星、測控資源、數(shù)傳資源等,如何在應(yīng)急條件下有效地對任務(wù)響應(yīng)過程中各個要素進(jìn)行協(xié)同,實(shí)現(xiàn)任務(wù)快速響應(yīng),是本文進(jìn)行的任務(wù)綜合規(guī)劃主要解決的問題。
1.2 任務(wù)響應(yīng)過程約束分析
成像衛(wèi)星工作過程看似是順序的,簡單的要素的分配,然而,在實(shí)際應(yīng)用的過程中,面臨諸多約束,建立問題模型之前,須對其中的約束予以分析,體現(xiàn)在以下幾個方面:
(1)任務(wù)需求與衛(wèi)星之間存在成像需求與衛(wèi)星載荷類型的匹配性、分辨率需求及成像條件約束;
(2)衛(wèi)星與用于測控的測控資源之間存在測控體制及可見性約束;
(3)衛(wèi)星與用于數(shù)據(jù)接收的數(shù)傳資源之間存在數(shù)傳體制及可見性約束;
(4)任務(wù)響應(yīng)過程存在接收到任務(wù)需求-衛(wèi)星狀態(tài)建立-成像-數(shù)據(jù)接收的時序性約束。
2 應(yīng)急條件下單任務(wù)綜合規(guī)劃模型
本節(jié)在對其中涉及的要素、約束進(jìn)行形式化描述的基礎(chǔ)上,建立相應(yīng)的問題模型。
2.1 要素的形式化描述
應(yīng)急條件下衛(wèi)星綜合任務(wù)規(guī)劃以任務(wù)需求為輸入,涉及衛(wèi)星、測控及數(shù)傳資源的分配,最后給出規(guī)劃結(jié)果,本節(jié)對其進(jìn)行形式化描述。首先,定義幾個集合。衛(wèi)星的成像類型集合描述為ScoC={可見光,紅外,多光譜,雷達(dá)};測控資源測控體制集合描述為CC={S,C,Ka,X,STL},分別表示{S頻段,C頻段,Ka頻段,X頻段,中繼測控};數(shù)傳資源數(shù)傳體制集合描述為DC={S,C,Ka,X,KaTL},分別表示{S頻段,C頻段,Ka頻段,X頻段,中繼數(shù)傳}。在此基礎(chǔ)上,將任務(wù)規(guī)劃涉及的要素作如下形式化描述。
(1) 成像任務(wù)需求描述為一個六元組TSco={TID,ts,TPos,TType,TRes,T_t},其中:
TID:任務(wù)編號;
ts:任務(wù)需求時刻;
TPos:TPos=(long,Lat.),表示成像目標(biāo)位置;
TType:TType∈ScoC,表示任務(wù)需求成像類型;
TRes:分辨率要求,單位為m;
T_t:T_t=[α,β],觀測需求的時間范圍(地方時),其中,α和β分別表示觀測需求允許的開始和結(jié)束時間,若α和β為0,則表示不對開始或結(jié)束的觀測時間作要求。
(2)衛(wèi)星資源及其特征描述為一個六元組SScoi={SName,SOrbit,STandR,STCGtype,SD typeB,SSA},其中:
SName:衛(wèi)星名稱;
SOrbit:SOrbit=(a,e,i,Ω,ω,M),表示衛(wèi)星軌道六根數(shù);
STandR:成像類型及分辨率,STandR={(SType1,SRes1),…,(STypei,SResi),…},其中,STypei∈ScoC,SResi表示分辨率,單位為m;
STCtype:可測控體制,STCtype?CC;
SD typeB:可數(shù)傳體制及帶寬,SD typeB={(SD type1,SDbw1),…,(SD typei,SDbwi),…},其中,SD typei∈DC,為可數(shù)傳體制,SDbw表示數(shù)傳帶寬,單位為Mbps;
SSA:最大側(cè)擺角度(°),若為0,則表示無側(cè)擺能力。
包含m個衛(wèi)星資源的幾何描述S={S1,S2,…,Sm}。
(3) 測控資源包括地基測控資源和天基測控資源,測控資源描述為C={CID,CGpos/CSorbit,Csys},其中:
CID:測控資源ID;
CGpos:地基測控資源位置,CGpos=(long,Lat.,alt.),分別表示經(jīng)度、緯度、海拔;
CSorbit:天基測控資源軌道,CSorbit=(a,e,i,Ω,ω,M),為軌道六根數(shù);
Csys:測控資源可測控體制,Csys?CC。
包含n個測控資源(地基測控站/中繼測控)的測控資源集合,可以描述為C={C1,C2,…,Cn}。
(4) 數(shù)傳資源同樣分為地基數(shù)傳站和天基數(shù)傳資源。數(shù)傳資源描述為D={DID,DGpos/DSorbit,Dsys},其中:
DID:數(shù)傳資源ID;
DGpos:地基數(shù)傳資源位置,DGpos=(long,Lat.,alt.),分別表示經(jīng)度、緯度、海拔;
DSorbit:天基數(shù)傳資源軌道,DSorbit=(a,e,i,Ω,ω,M);
Dsys:數(shù)傳資源可接收數(shù)傳體制及帶寬,Dsys={(DD type1,DDbw1),…,(DD typei,DDbwi),…},其中,DD typei?DC,數(shù)傳資源可數(shù)傳體制,DDbwi表示數(shù)傳帶寬,單位為Mbps;
包含j個數(shù)傳資源(地基數(shù)傳站/中繼數(shù)傳),數(shù)傳資源集合可以描述為D={D1,D2,…,Dj}。
(5) 規(guī)劃結(jié)果描述了針對應(yīng)急條件下衛(wèi)星任務(wù)需求,經(jīng)規(guī)劃為其分配的衛(wèi)星資源、測控及數(shù)傳資源。對于給定的應(yīng)用任務(wù)需求Ti,其規(guī)劃結(jié)果可以描述為R={T,SR,CR,DR},其中:
T:任務(wù)需求;
SR:完成任務(wù)所需的衛(wèi)星資源,SR∈S;
CR:衛(wèi)星資源建立工作狀態(tài)所需的測控資源規(guī)劃結(jié)果,描述為CR=(CRID,Carc),分別表示測控資源及其測控弧段,其中CRID∈C.CID,Carc=[Carcα,Carcβ]∈fc(SR.SOrbit,CR),fC表示衛(wèi)星與測控資源的可見約束。
DR:接收衛(wèi)星資源所需的數(shù)傳資源規(guī)劃結(jié)果,描述為DR=(DRID,Darc),分別表示數(shù)傳資源及其數(shù)傳弧段,其中,DRID∈D.DID,Darc=[Darcα,Darcβ]∈fD(SR.SOrbit,DR),fD表示衛(wèi)星與數(shù)傳資源的可見約束。
2.2 問題假設(shè)
模型的建立及進(jìn)行算法求解時作如下假設(shè):
(1) 任務(wù)需求為點(diǎn)目標(biāo)成像任務(wù);
(2) 接收到成像任務(wù)需求后,在一個測控弧段內(nèi)能對衛(wèi)星完成測控并建立工作狀態(tài);
(3) 數(shù)據(jù)能在一個數(shù)傳接收弧段內(nèi)完成,且數(shù)據(jù)接收完成時刻定義為弧段結(jié)束時刻;
(4) 考慮數(shù)據(jù)實(shí)傳的情況,數(shù)據(jù)接收時刻不早于成像開始時刻。
2.3 單任務(wù)綜合規(guī)劃模型
基于上述對規(guī)劃要素的形式化描述、約束條件分析及問題的假設(shè),建立應(yīng)急條件下成像衛(wèi)星單任務(wù)綜合規(guī)劃問題模型,表示如下:
f(R)=minte,te=R.DR.Darc.Darcβ
(1)
s.t.
?STandR.STypei∈SType,STandR.STypei=T.TType
(2)
S.STandR.SRes≤T.TRes
(3)
fW(SR.SOrbit,T.TPos,SR.SSA)≠?且fW∈T.T_t
(4)
?STCtypei∈STCtype,STCtypei∈CR.Csys
(5)
fc(SR.SOrbit,CR)≠?
(6)
?SD typei∈SD type,SD typei∈DR.Dsys且SDbwi≤DR.DD typei
(7)
fD(SR.SOrbit,DR)≠?
(8)
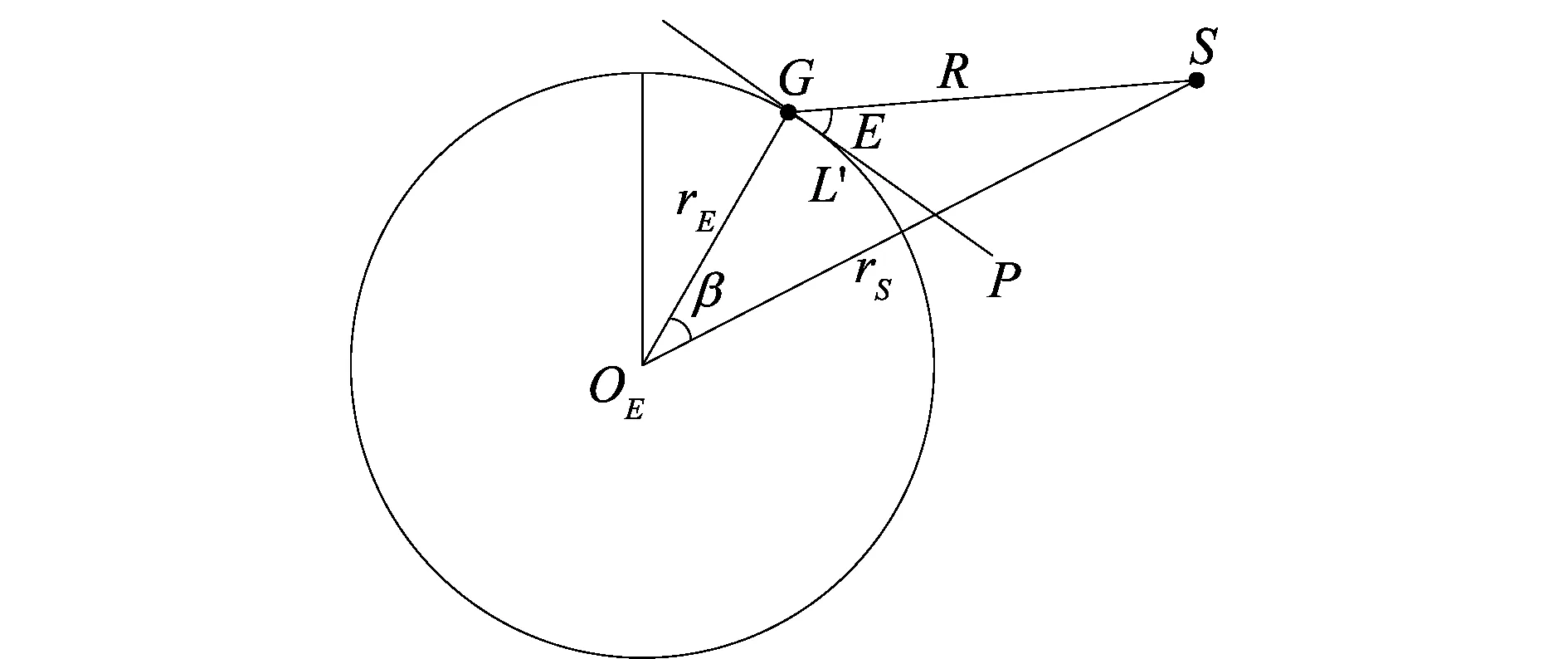
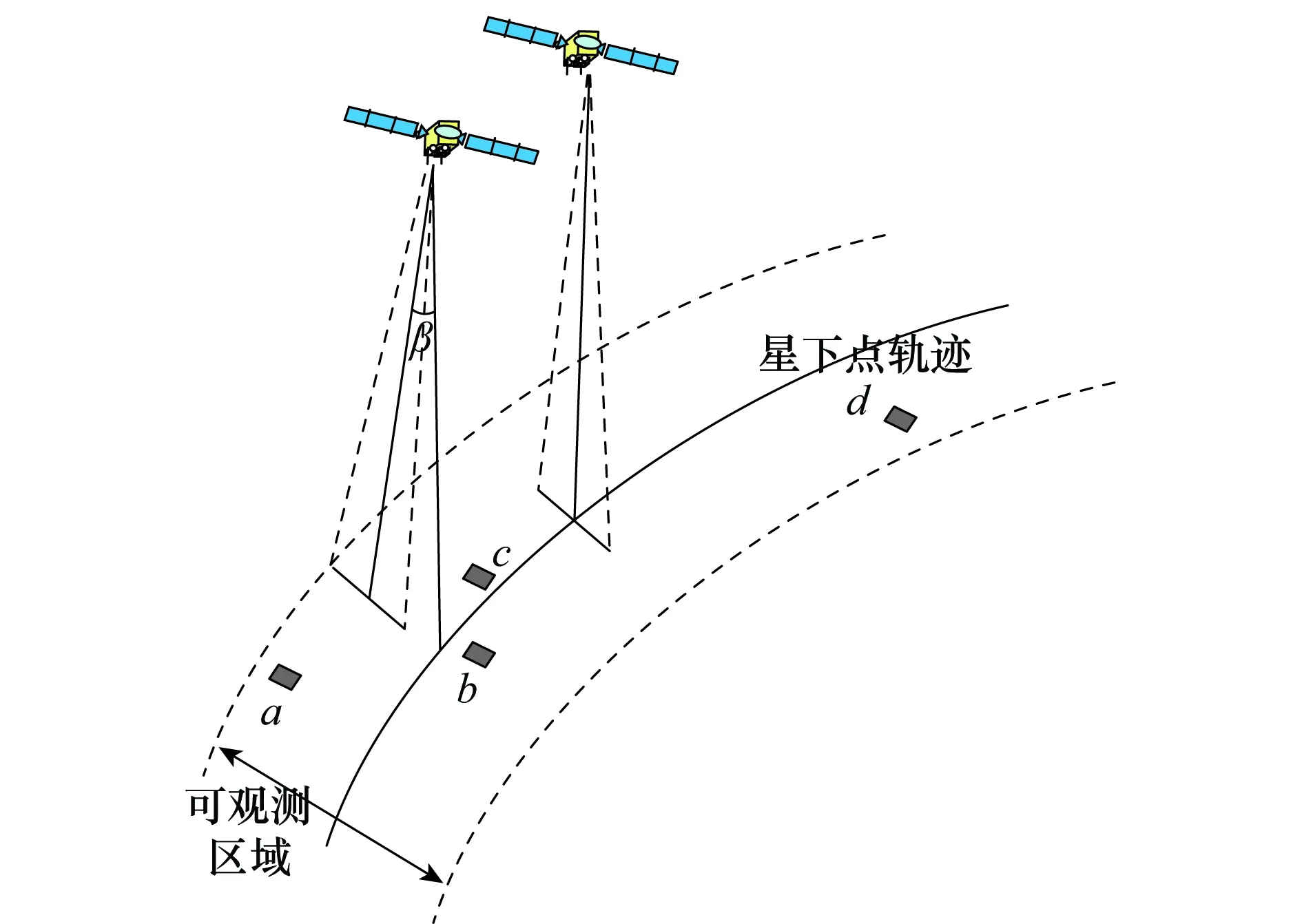
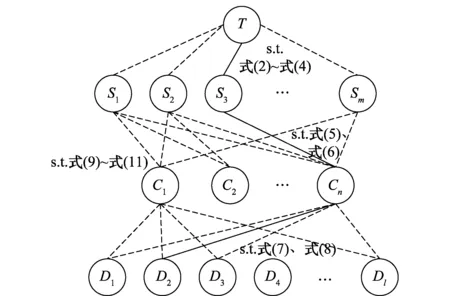
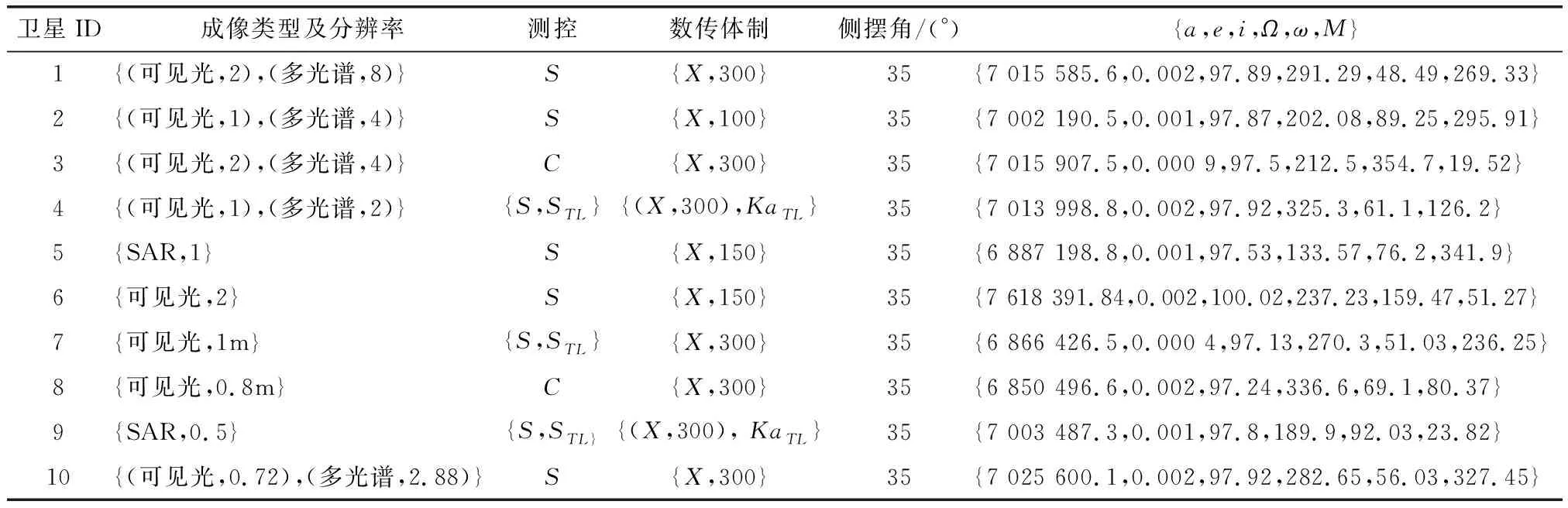
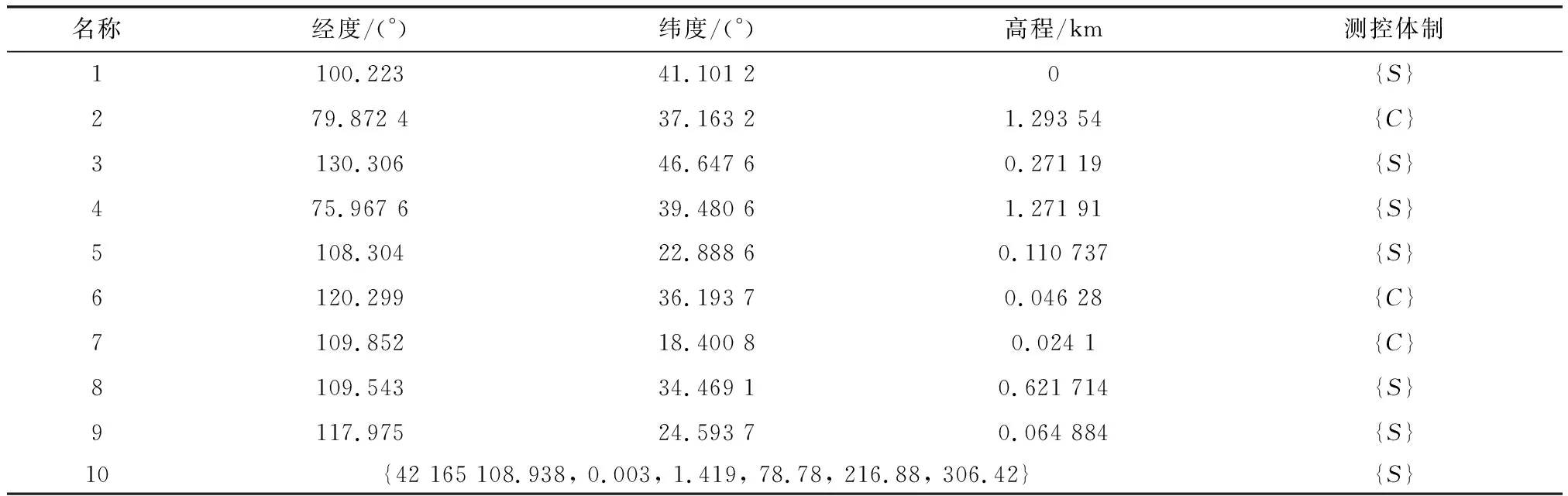
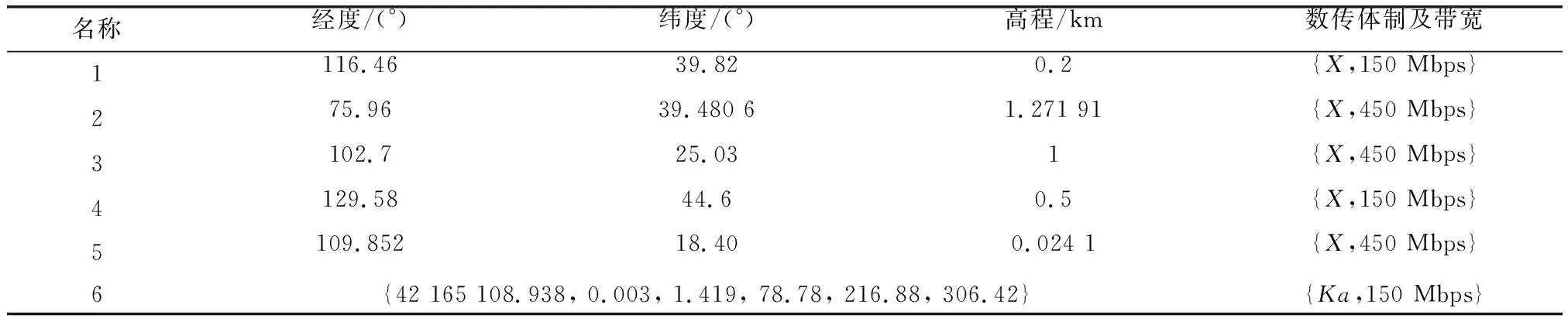
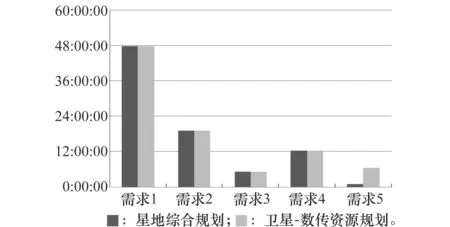
T.ts (9) CR.Carc.Carcβ≤Warc.Warcα (10) Warc.Warcα≤DR.Darc.Darcα (11) 式中,Warc=[Warcα,Warcβ],且Warc∈fW(SR.SOrbit,T.TPos,SR.SSA),fW表示衛(wèi)星與成像目標(biāo)點(diǎn)位可見性約束。應(yīng)急任務(wù)需求條件下,希望在提出任務(wù)需求后能盡快獲得成像數(shù)據(jù),若提出任務(wù)需求的時刻為ts,任務(wù)需求響應(yīng)結(jié)束時刻te,對于單個成像任務(wù)而言,任務(wù)需求響應(yīng)結(jié)束時刻即為數(shù)據(jù)接收完畢的時刻,即te=DR.Darc.Darcβ,因此,提出如式(1)所示的優(yōu)化目標(biāo)函數(shù),式(2)~式(11)分別表示對第1.2節(jié)中所述約束的數(shù)學(xué)描述。 事實(shí)上,本文建立的單任務(wù)綜合規(guī)劃模型中涉及大量的數(shù)據(jù)計(jì)算,同時也是進(jìn)行模型求解的基礎(chǔ)。 首先,衛(wèi)星資源與測控資源、數(shù)傳資源之間存在可見性約束分析計(jì)算,即模型中所述的fC、fD,測控、數(shù)傳等地面資源的可見約束模型如圖2和式(12)所示[5],一般,仰角E>5°即視為可見。 圖2 地面站與衛(wèi)星可見約束示意圖Fig.2 Visible restriction between station and satellite (12) 式中,β=L′,rS=rE+R。 此外,模型中還涉及衛(wèi)星與成像目標(biāo)點(diǎn)位的可見性約束fW計(jì)算,與衛(wèi)星軌道、最大側(cè)擺角度等要素有關(guān),如圖3所示,其數(shù)據(jù)計(jì)算可通過STK(SIM tool kit)進(jìn)行。 圖3 衛(wèi)星成像約束示意圖Fig.3 Restriction of satellite imaging 在上述數(shù)據(jù)計(jì)算的基礎(chǔ)上,進(jìn)行模型求解算法設(shè)計(jì)。 通過對成像衛(wèi)星工作過程及其要素間存在約束的分析,假設(shè)衛(wèi)星、測控及數(shù)傳資源的數(shù)量分別為m,n,l,則規(guī)劃結(jié)果將在m×n×l的搜索空間內(nèi)產(chǎn)生,隨著衛(wèi)星、測控及數(shù)傳資源數(shù)量及種類的增多,復(fù)雜性也隨之增加[11],與此同時,要素之間還存在式(2)~式(11)描述的約束。對于單個任務(wù)需求而言,整個搜索空間可以看成是以任務(wù)需求為根節(jié)點(diǎn)的樹形網(wǎng)狀結(jié)構(gòu)[12],按照模型假設(shè),規(guī)劃結(jié)果必須包含衛(wèi)星、測控及數(shù)傳資源等要素,那么模型的求解過程即是在整個搜索空間內(nèi)尋找一條路徑,使得模型提出的優(yōu)化目標(biāo)函數(shù)值最小[13],如圖4所示。 圖4 任務(wù)規(guī)劃搜索空間示意圖Fig.4 Search space of mission schedule 若衛(wèi)星集合S={S1,S2,…,Sm},測控資源集合C={C1,C2,…,Cn},數(shù)傳資源集合D={D1,D2,…,Dl},模型解的搜索空間與圖相似又不同于圖,同時節(jié)點(diǎn)之間又存在約束[14],是一個涉及天地資源協(xié)調(diào)的約束滿足[15-16]問題,本文借鑒深度優(yōu)先搜索[17]的思想構(gòu)建模型的求解算法,在搜索過程中處理要素之間的約束,描述如下: 輸入成像任務(wù)需求T。 輸出R={T,SR,CR,DR}。 步驟1初始化參數(shù)i=1,j=1,k=1,Carc=?,Darc=?,tE=∞,R=?,flag=0; 步驟2對于Si∈S,計(jì)算Warc=fW(Si.SOrbit,T.TPos,Si.SSA),若同時滿足約束(2)~約束(4),則轉(zhuǎn)入步驟3,否則轉(zhuǎn)入步驟6; 步驟3對于?Cj∈C,計(jì)算Ctemp=fc(Si.SOrbit,Cj),若同時滿足約束(5)和約束(6),則在滿足約束(9)、約束(10)的前提下,計(jì)算Carc=minCtemp; 步驟4對于?Dk∈D,計(jì)算Dtemp=fd(Si.SOrbit,Dk),若同時滿足約束(7)和約束(8),則在滿足約束(11)的前提下,計(jì)算Darc=minDtemp,得出Darc.Darcα; 步驟5若Darc.Darcα 步驟6i=i+1,若i>m,退出; 步驟7轉(zhuǎn)入步驟2。 計(jì)算完成后,若flag=1,即可得到規(guī)劃結(jié)果R={T,SR,CR,DR},即為針對任務(wù)需求T,運(yùn)用本文提出的算法計(jì)算得到的任務(wù)規(guī)劃結(jié)果,理論上,只要計(jì)算時間區(qū)間足夠長,總能得到滿足任務(wù)需求的規(guī)劃結(jié)果。 為了驗(yàn)證模型及算法的正確性及可行性,選擇10顆不同類型的衛(wèi)星組成的成像衛(wèi)星系統(tǒng),10個測控資源(含天基測控資源)組成的測控系統(tǒng),6個數(shù)傳資源(含天基數(shù)傳資源),衛(wèi)星、測控及數(shù)傳資源信息分別如表1~表3所示,基于STK,運(yùn)用本文建立的模型及算法進(jìn)行仿真計(jì)算驗(yàn)證。其中,天基測控、數(shù)傳資源與衛(wèi)星可見計(jì)算時,假設(shè)掃描角為[50°,80°]。 仿真計(jì)算起始時間(UTC)27 Jul 2016 00:00:00,結(jié)束時間(UTC)30 Jul 2016 00:00:00,假設(shè)由于某應(yīng)急任務(wù),需要分別對坐標(biāo)為(157.9°W,21.3°N)和(109°E,34°N)的兩個目標(biāo)進(jìn)行成像偵察,則不同任務(wù)需求條件下的計(jì)算結(jié)果如表4所示,表中時間為UTC時。 表4為不同任務(wù)需求下的規(guī)劃結(jié)果。需求1和需求2比較,成像任務(wù)需求相同,但觸發(fā)時刻及分辨率要求不同,對衛(wèi)星、測控及數(shù)傳資源的選擇也會不同;需求1、3和需求4、5分別進(jìn)行比較,成像類型需求不同,對衛(wèi)星進(jìn)行約束的同時,進(jìn)而也會影響測控及數(shù)傳資源的分配;需求3和需求4比較,成像點(diǎn)位不同,由于衛(wèi)星過境的時間約束,使得為其分配的數(shù)傳資源不同。 此外,在原有仿真條件下,對不考慮測控資源在內(nèi)的衛(wèi)星-數(shù)傳資源規(guī)劃進(jìn)行了仿真分析,假設(shè)運(yùn)控向測控系統(tǒng)的資源申請所需時間為30 min,仿真規(guī)劃結(jié)果如表5所示,兩種模式下響應(yīng)時間對比如圖5所示。不難看出,表5中,對于任務(wù)需求3、4,盡管總的響應(yīng)時間不變,但所需的測控資源有所變化,對于任務(wù)需求5,其響應(yīng)時間則大大增加,并且,隨著可用衛(wèi)星、測控、數(shù)傳資源數(shù)量的增加,這種影響將隨之增加。 表1 衛(wèi)星資源信息 表2 測控資源信息 表3 數(shù)傳資源信息 表4 不同任務(wù)需求條件下的規(guī)劃結(jié)果 表5 不考慮測控資源情況下的規(guī)劃結(jié)果 圖5 規(guī)劃結(jié)果響應(yīng)時間比較Fig.5 Comparison of responsing time with different scheduled mode 通過上述仿真分析,并從分析結(jié)果看,可以得出如下結(jié)論。 首先,本文建立的面向應(yīng)急需求的成像衛(wèi)星單任務(wù)綜合規(guī)劃模型有效,能夠就給定的單個任務(wù)需求情況下,通過對衛(wèi)星、測控、數(shù)傳資源的綜合規(guī)劃,能夠得出可行且響應(yīng)時間最短的星地資源分配方案。 其次,本文提出的星地資源綜合規(guī)劃模型,較現(xiàn)有只考慮衛(wèi)星或衛(wèi)星-數(shù)傳資源規(guī)劃,能夠有效降低整個應(yīng)急任務(wù)需求的響應(yīng)時間。 本文針對成像衛(wèi)星單任務(wù)需求條件下的綜合規(guī)劃問題,考慮衛(wèi)星、測控及數(shù)傳資源規(guī)劃,以任務(wù)響應(yīng)最快為優(yōu)化目標(biāo),建立了應(yīng)急條件下成像衛(wèi)星單任務(wù)綜合規(guī)劃的約束滿足優(yōu)化模型,并基于深度優(yōu)先搜索的思想,給出了相應(yīng)的模型求解算法。仿真分析結(jié)果表明,建立的模型有效可用,對于應(yīng)急條件下成像任務(wù)需求,能夠規(guī)劃給出響應(yīng)時間最短的星地資源分配方案,且與衛(wèi)星-數(shù)傳資源聯(lián)合規(guī)劃的模式比較,能夠有效降低需求響應(yīng)時間。應(yīng)急任務(wù)需求往往是并發(fā)的或者可能涉及區(qū)域目標(biāo)的分解,下一步研究將在此基礎(chǔ)上針對多任務(wù)需求條件下的綜合規(guī)劃問題展開。3 模型求解
3.1 數(shù)據(jù)計(jì)算
3.2 基于深度優(yōu)先的模型求解算法
4 仿真驗(yàn)證
4.1 仿真分析


4.2 仿真結(jié)論
5 結(jié)術(shù)語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38吉林廣播電視大學(xué)學(xué)報(2021年4期)2022-01-14 02:35:48中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24小天使·一年級語數(shù)英綜合(2018年11期)2018-11-23 09:47:26領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16商周刊(2017年5期)2017-08-22 03:35:26資源再生(2017年3期)2017-06-01 12:20:59中國衛(wèi)生(2016年2期)2016-11-12 13:22:16