基于鄰域跟隨與辨識(shí)的無人機(jī)集群控制與規(guī)避策略
2018-09-27 11:59:04張代兵李小民董海瑞杜占龍
系統(tǒng)工程與電子技術(shù) 2018年9期
毛 瓊, 張代兵, 李小民,3, 董海瑞, 杜占龍
(1. 中國(guó)人民解放軍陸軍工程大學(xué)石家莊校區(qū)無人機(jī)工程系, 河北 石家莊 050003; 2. 國(guó)防科技大學(xué) 智能學(xué)院, 湖南 長(zhǎng)沙 410073; 3. 石家莊鐵道大學(xué)電氣與電子工程學(xué)院, 河北 石家莊 050003)
0 引 言
多架無人機(jī)(unmanned aerial vehicles, UAVs)彼此協(xié)同完成軍事目標(biāo)打擊、目標(biāo)跟蹤與偵察等任務(wù)可大幅度減少任務(wù)執(zhí)行的時(shí)間、提高作戰(zhàn)的效率和成功率[1-2]。隨著作戰(zhàn)環(huán)境的日趨復(fù)雜,空間無人機(jī)的數(shù)量和密度上升,強(qiáng)電磁環(huán)境易使無人機(jī)通信致盲以及潛在的突發(fā)障礙等問題給無人機(jī)集群的飛行控制與安全帶來一系列挑戰(zhàn)[3-4]。
無人機(jī)集群系統(tǒng)屬于局部感知或通信的分布式體系結(jié)構(gòu),目前主要的控制方法有:基于局部規(guī)則的控制[5-7]、軟控制[8-10]、領(lǐng)航跟隨法[11-14]和人工勢(shì)場(chǎng)法[15-23]。基于局部規(guī)則的控制方法最基礎(chǔ),能實(shí)現(xiàn)集群智能的涌現(xiàn)控制,但是難使集群涌現(xiàn)到期望的控制方向;軟控制是在局部規(guī)則的基礎(chǔ)上通過為集群加入一外部可控的無人機(jī),引導(dǎo)群內(nèi)其他無人機(jī)朝著人們期望的方向運(yùn)動(dòng),文獻(xiàn)[10]利用其成功實(shí)現(xiàn)了分群;領(lǐng)航控制法利用集群中信息豐富的無人機(jī)引導(dǎo)實(shí)現(xiàn)集群控制,文獻(xiàn)[7]針對(duì)部分無人機(jī)獲得航跡信息進(jìn)行了研究,直接將掌握航跡信息的無人機(jī)設(shè)為領(lǐng)導(dǎo)者和不掌握航跡信息的無人機(jī)設(shè)為跟隨者,沒考慮無人機(jī)如何辨識(shí)誰是領(lǐng)導(dǎo)者的問題;人工勢(shì)場(chǎng)法通過構(gòu)建全局勢(shì)場(chǎng)函數(shù)引導(dǎo)智能體向勢(shì)能降低的方向運(yùn)動(dòng),該方法簡(jiǎn)單實(shí)用,在避障方面有優(yōu)勢(shì),但存在局部極值問題。
本文以上述方法為基礎(chǔ),研究了理想全通信環(huán)境下所有無人機(jī)都能獲得目標(biāo)航跡信息和電磁干擾環(huán)境下部分無人機(jī)能獲得目標(biāo)航跡信息條件下的集群控制方法。對(duì)于第一種情況,本文將局部規(guī)則與勢(shì)場(chǎng)法融合改進(jìn)引力和斥力函數(shù),并結(jié)合軟控制方法控制無人機(jī)涌現(xiàn)出群聚行為和使集群沿著指定的航跡運(yùn)動(dòng),針對(duì)未知突發(fā)障礙,在有限視覺感知的基礎(chǔ)上采取應(yīng)急避障的方法處理,并借助于運(yùn)動(dòng)環(huán)境的動(dòng)態(tài)性幫助無人機(jī)擺脫局部極值;對(duì)于第二種情況,在文獻(xiàn)[7]的基礎(chǔ)上采用鄰域辨識(shí)的方法為未獲得航跡信息的無人機(jī)選擇跟隨目標(biāo),構(gòu)成局部的領(lǐng)航控制模式,使無人機(jī)逐漸聚集和沿著指定航跡飛行。
1 基于集群智能的UAVs系統(tǒng)建模
1.1 群內(nèi)部成員模型
無人機(jī)集群屬由N個(gè)無人機(jī)組成的分布式系統(tǒng),每個(gè)無人機(jī)的運(yùn)動(dòng)可用一個(gè)6自由度的運(yùn)動(dòng)方程表示[15],經(jīng)微分同胚[16]后可抽象為
,i=1,2,…,N
(1)
式中,Pi(x,y,z)表示無人機(jī)i的空間位置;vi表示速度;ai表示加速度。通過在制導(dǎo)系統(tǒng)環(huán)節(jié)設(shè)計(jì)加速度ai可控制無人機(jī)沿著預(yù)定路徑飛行,其他交由自動(dòng)駕駛儀完成。
此外,無人機(jī)飛行時(shí)存在如下約束:
(1) 加速度約束
(2)
式中,Amax為無人機(jī)的最大加速度。
(2) 速度約束
(3)
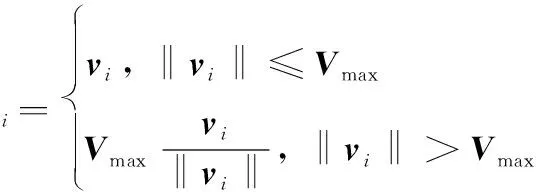
式中,Vmax為無人機(jī)的最大運(yùn)動(dòng)速度。
1.2 無人機(jī)的運(yùn)動(dòng)控制規(guī)則
本文研究的分布式無人機(jī)系統(tǒng)的整體運(yùn)動(dòng)受無人機(jī)運(yùn)動(dòng)規(guī)則控制,是無人機(jī)間局部交互產(chǎn)生的一種涌現(xiàn)行為。根據(jù)無人機(jī)行為交互對(duì)象的不同,可將集群內(nèi)部無人機(jī)的運(yùn)動(dòng)分解為3個(gè)子目標(biāo):保持群聚、奔向目標(biāo)和規(guī)避障礙,因此受鄰近無人機(jī)群聚力、目標(biāo)的吸引力與障礙的排斥力三者的綜合作用,對(duì)無人機(jī)質(zhì)量進(jìn)行歸一化處理后其運(yùn)動(dòng)控制量ai可表示為

(4)
式中,等號(hào)右側(cè)第1項(xiàng)為目標(biāo)吸引產(chǎn)生的控制分量;第2項(xiàng)為規(guī)避障礙的控制分量;第3項(xiàng)為同集群的其他鄰居無人機(jī)j對(duì)無人機(jī)i產(chǎn)生的吸引控制分量;α為無人機(jī)能否正常接收目標(biāo)航跡信息的標(biāo)志,α=1表示無人機(jī)i能正常接收航跡信息,此時(shí)式(4)等號(hào)右側(cè)第4項(xiàng)為0;α=0表示無人機(jī)i不能正常接收航跡信息,此時(shí)式(4)等號(hào)右側(cè)第1項(xiàng)為0,第4項(xiàng)不為0,表示無人機(jī)i需從鄰域內(nèi)選擇無人機(jī)G進(jìn)行跟隨;γ1、γ2和γ3為各個(gè)控制分量的權(quán)重,由于無人機(jī)i在接收不到目標(biāo)航點(diǎn)的情況下把無人機(jī)G當(dāng)做目標(biāo)航點(diǎn)進(jìn)行追隨,所以式(4)等號(hào)右側(cè)第1項(xiàng)和第4項(xiàng)的控制強(qiáng)度系數(shù)相同且均為γ1,集群內(nèi)部無人機(jī)的運(yùn)動(dòng)控制主要通過設(shè)計(jì)ai實(shí)現(xiàn)。
1.2.1 群聚運(yùn)動(dòng)的控制
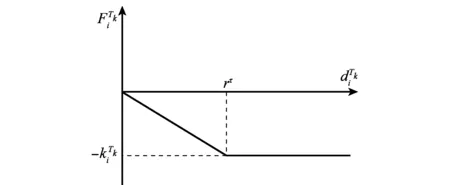
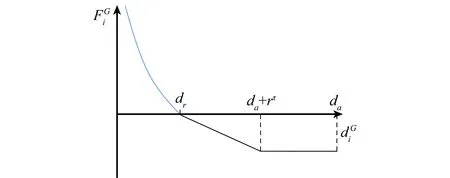
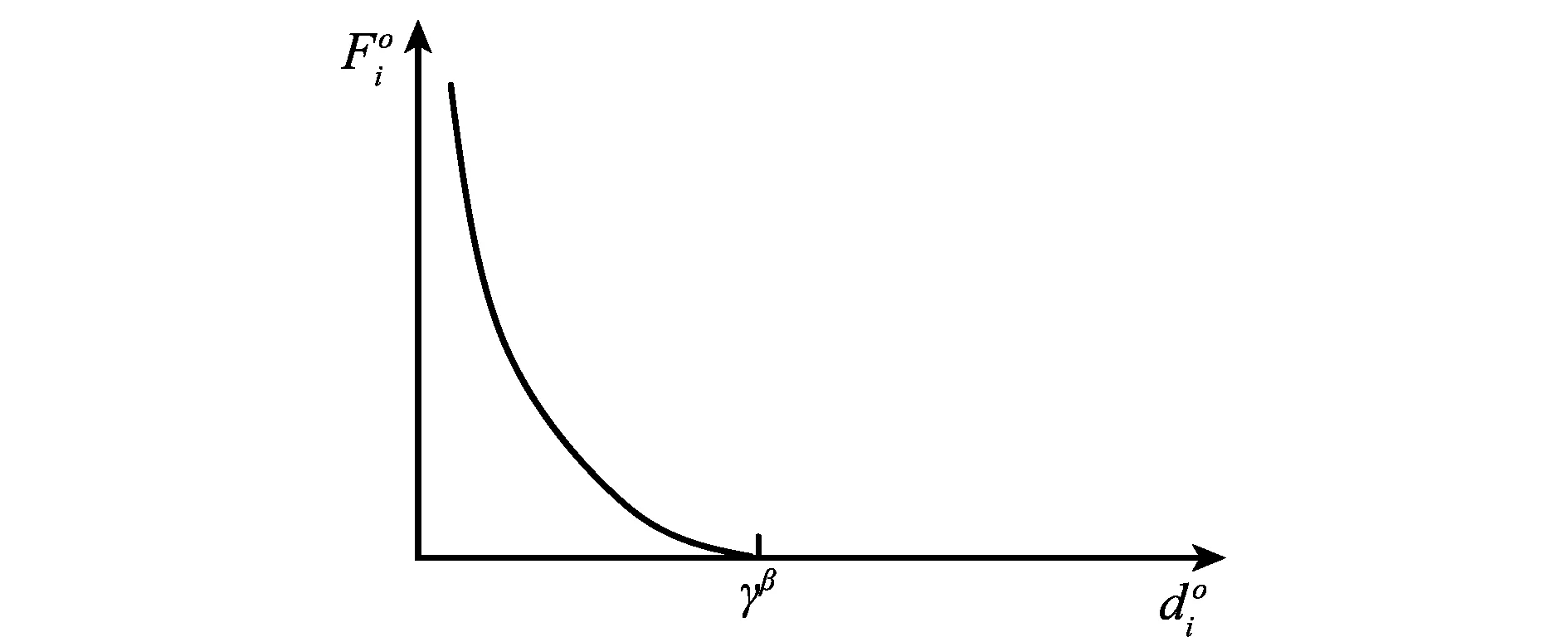
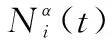
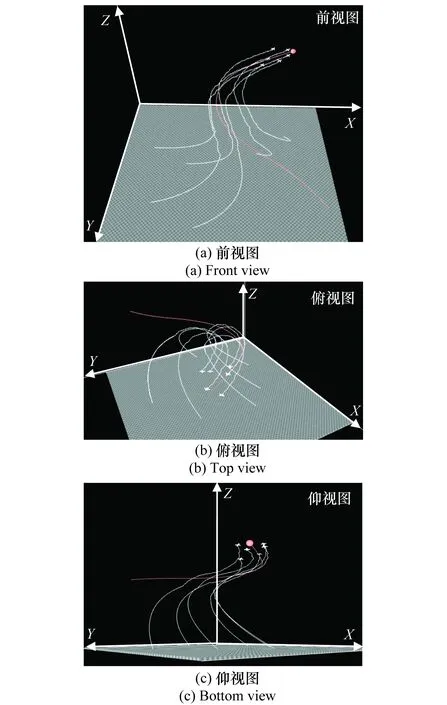
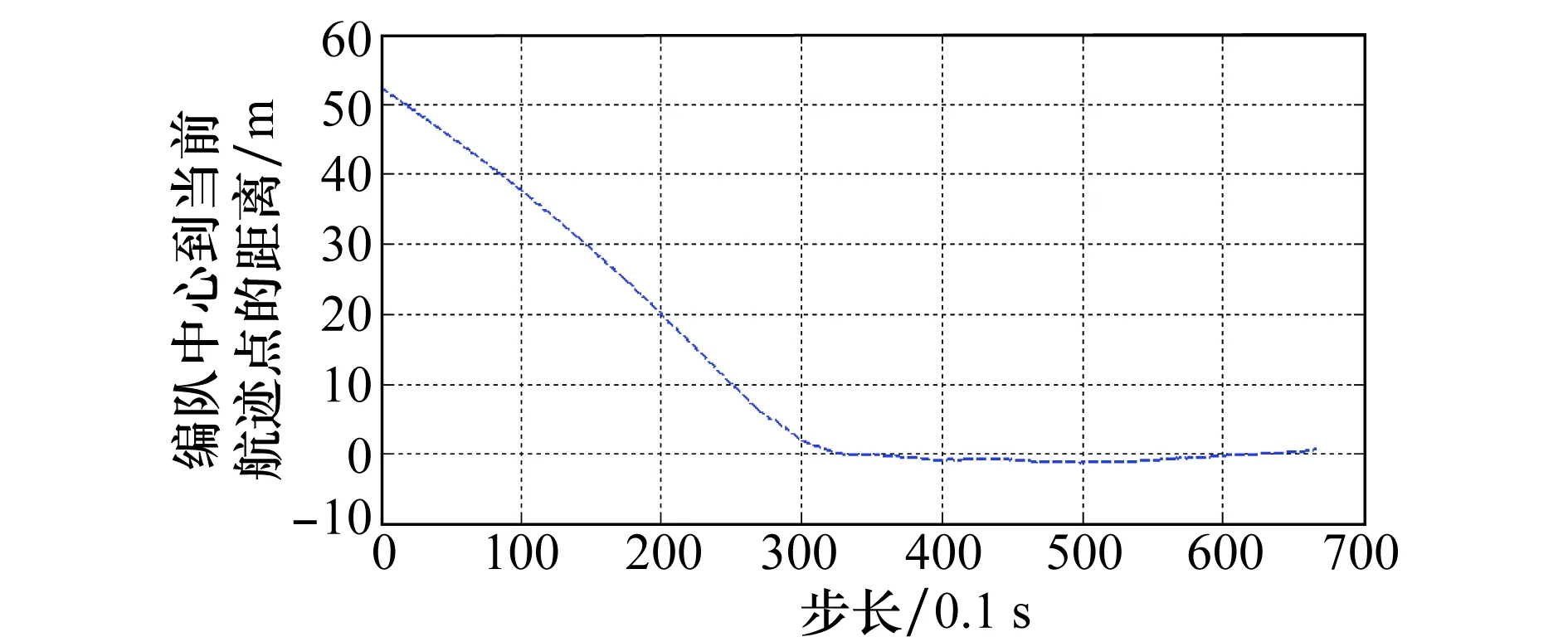
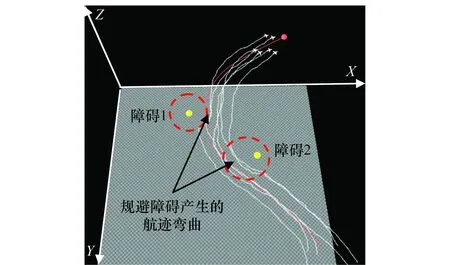
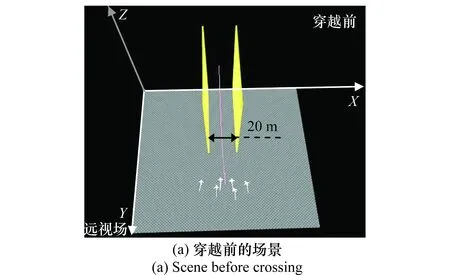
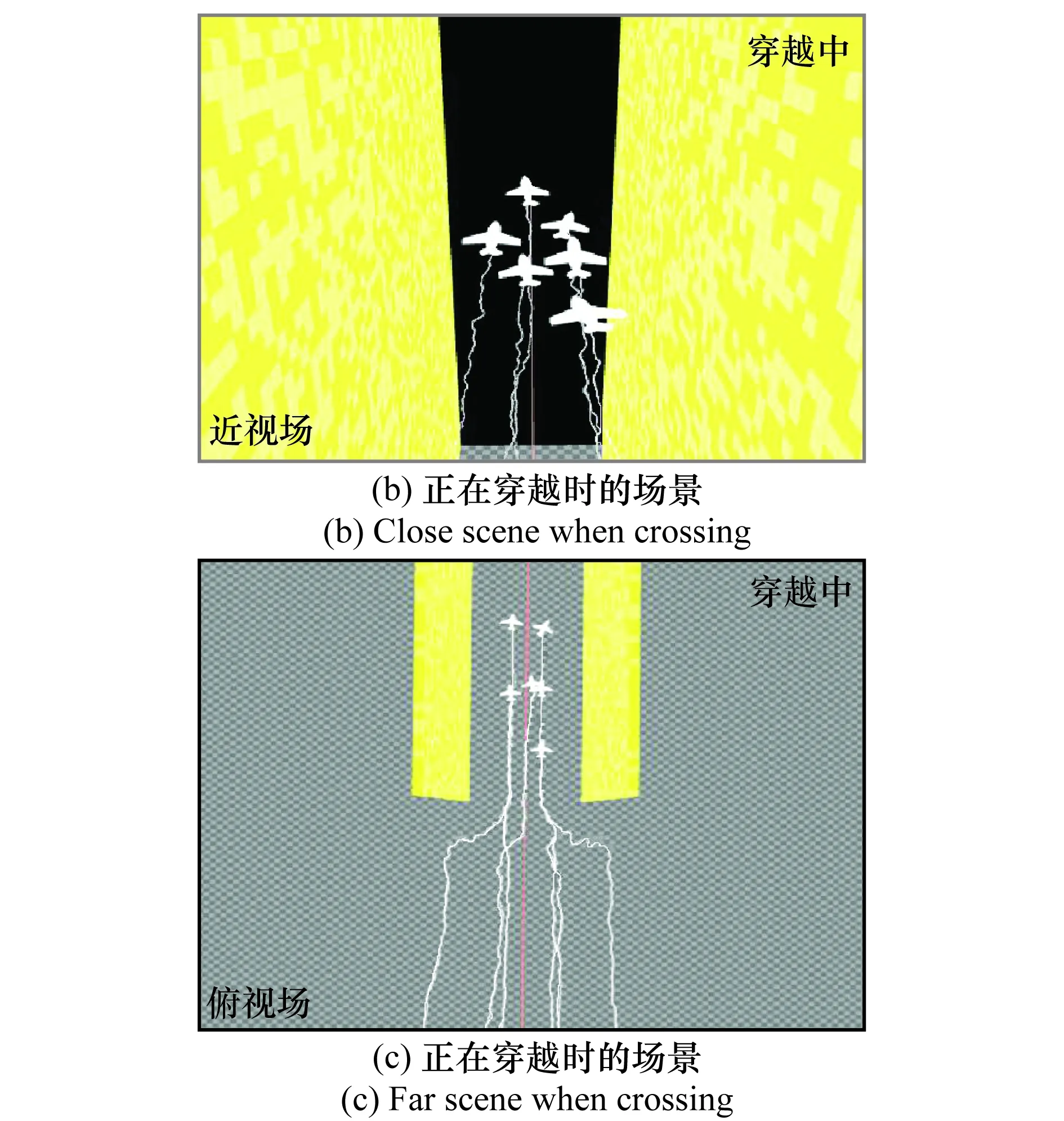
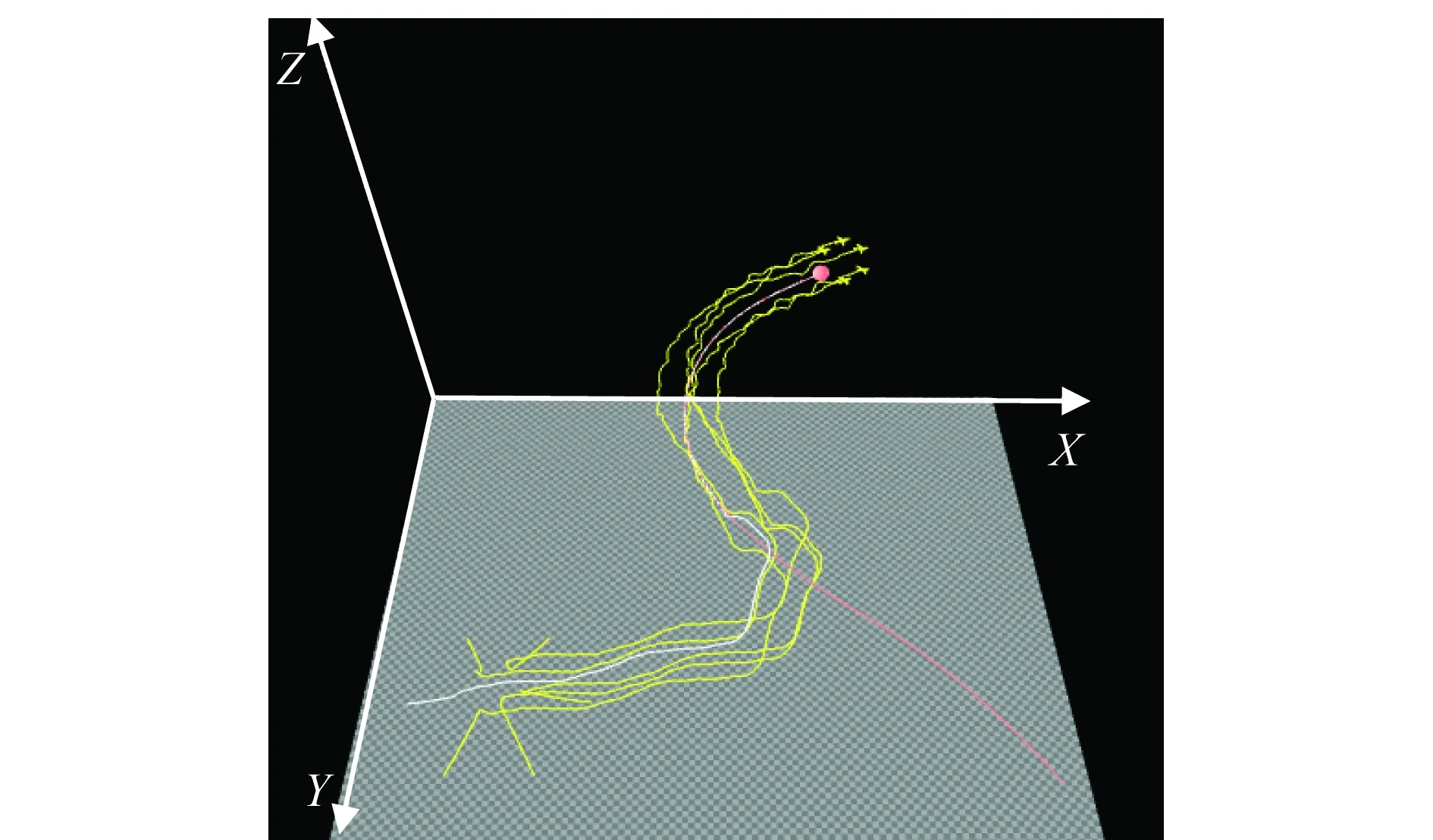
傳統(tǒng)的基于局部規(guī)則的控制方法對(duì)控制無人機(jī)群聚效果明顯,主要建立在排斥域、一致域和吸引域3個(gè)感知域的避撞、結(jié)隊(duì)和聚集3個(gè)運(yùn)動(dòng)規(guī)則基礎(chǔ)上。設(shè)無人機(jī)i通過機(jī)載傳感器感知周圍無人機(jī)的位置、速度,探測(cè)距離為da,其探測(cè)區(qū)域?yàn)橐詿o人機(jī)i所在的位置為中心,da為半徑構(gòu)成的圓形區(qū)域,t時(shí)刻落在無人機(jī)i的探測(cè)區(qū)域內(nèi)的無人機(jī)用集合Ni(t)表示。在該探測(cè)區(qū)域內(nèi),以dr和do為界(0 (5) (6) (7) (8) 圖1 無人機(jī)i和無人機(jī)j之間的作用力Fig.1 Force between UAV i and UAV j 1.2.2 朝向目標(biāo)的運(yùn)動(dòng)控制 為控制無人機(jī)集群前往目標(biāo)區(qū)執(zhí)行任務(wù),首先將無人機(jī)集群作為一個(gè)整體進(jìn)行航跡規(guī)劃,以減少路徑規(guī)劃的復(fù)雜性;其次將航跡分解成一系列序列位置點(diǎn)Track={T1,T2,…,Tm};通過自動(dòng)相關(guān)監(jiān)視廣播系統(tǒng)(automatic dependent surveillance broadcast,ADS-B)將上述序列位置點(diǎn)的位置和速度信息按著時(shí)間順序向各架無人機(jī)播發(fā),隨著時(shí)間的推進(jìn),目標(biāo)航點(diǎn)信息被更新,從而控制和引導(dǎo)集群成員沿著規(guī)劃的路徑飛行和到達(dá)目的地。該信息分發(fā)系統(tǒng)可布置于集群內(nèi)部的任意一架無人機(jī),也可布置在有人機(jī)或地面控制站,且布置在有人機(jī)或地面控制站時(shí)可靈活改變航點(diǎn)信息,提高集群控制的機(jī)動(dòng)性和靈活性。根據(jù)機(jī)載廣播式自動(dòng)相關(guān)監(jiān)測(cè)設(shè)備接收端(ADS-B IN)能否正常接收航點(diǎn)信息,可分為以下兩種情況。 (1)所有無人機(jī)均可獲得航點(diǎn)信息 (vi-vTk) (9) (10) (11) 圖2 無人機(jī)與目標(biāo)之間的作用力Fig.2 Force between the UAV and target (2) 少部分無人機(jī)可獲得航點(diǎn)信息 由于強(qiáng)電磁干擾易使無人機(jī)的通信中斷導(dǎo)致其不能獲得目標(biāo)航點(diǎn)信息,在此情況下需要尋找其他的途徑以補(bǔ)償目標(biāo)信息缺失帶來的風(fēng)險(xiǎn),如借助于機(jī)載傳感系統(tǒng)對(duì)附近其他無人機(jī)的位置和速度進(jìn)行測(cè)量,此時(shí)未接收到航點(diǎn)信息的無人機(jī)在第1.2.1節(jié)的群聚作用下仍能繼續(xù)維持群聚運(yùn)動(dòng),但隨著掌握航點(diǎn)信息無人機(jī)的比例下降到1/3以下時(shí),無人機(jī)經(jīng)常產(chǎn)生脫離集群的現(xiàn)象(文獻(xiàn)[7]中描述),且隨著掌握航點(diǎn)信息無人機(jī)的比例下降,集群內(nèi)無人機(jī)飛行路徑的平滑度大幅度下降,給集群的控制與安全帶來了很大的困難。為改進(jìn)該問題,文獻(xiàn)[7]令領(lǐng)導(dǎo)者開啟局部導(dǎo)航通信功能向周圍無人機(jī)發(fā)送航點(diǎn)信息,這在復(fù)雜電磁干擾環(huán)境中不現(xiàn)實(shí),本文提出基于機(jī)載探測(cè)系統(tǒng)的鄰域感知與辨識(shí)的方法,幫助未接收到航點(diǎn)信息的無人機(jī)i從其鄰域Ni(t)內(nèi)捕捉運(yùn)動(dòng)變化最快的無人機(jī)G,即將其當(dāng)做目標(biāo)航點(diǎn)進(jìn)行跟隨。 (12) (13) (14) (15) 無人機(jī)與目標(biāo)無人機(jī)之間的作用力如圖3所示。 圖3 無人機(jī)與目標(biāo)無人機(jī)之間的作用力Fig.3 Force between the UAV and target UAV 1.2.3 規(guī)避障礙的運(yùn)動(dòng)控制 集群沿著預(yù)定航跡飛往目的地的過程中,會(huì)遇到障礙的威脅。無人機(jī)為保證自身的飛行安全,需要對(duì)障礙物進(jìn)行規(guī)避。根據(jù)障礙事先是否已知可分為已知障礙威脅和未知障礙威脅。對(duì)于已知障礙威脅,可在航跡規(guī)劃階段進(jìn)行初步處理,飛行過程中無人機(jī)主動(dòng)進(jìn)行規(guī)避;對(duì)于未知障礙威脅,則依賴于機(jī)載傳感器的探測(cè)能力、計(jì)算機(jī)信息處理速度和執(zhí)行機(jī)構(gòu)的動(dòng)作時(shí)間等眾多因素。本文討論未知威脅,為了與實(shí)際情況相符,設(shè)無人機(jī)i的探測(cè)距離為da,機(jī)載計(jì)算機(jī)信息處理和執(zhí)行機(jī)構(gòu)響應(yīng)的時(shí)間總和為τ=0.25 s,無人機(jī)自探測(cè)到障礙的時(shí)刻起τ秒后立即采取相應(yīng)的應(yīng)急避障策略,二者之間通過式(16)斥力函數(shù)進(jìn)行設(shè)計(jì)。 (16) (17) (18) 圖4 無人機(jī)與障礙之間的作用力Fig.4 Force between the UAV and obstacle 對(duì)集群而言,如果集群內(nèi)部無人機(jī)之間的距離保持不變,則說明其具有良好的穩(wěn)定性和魯棒性。為簡(jiǎn)化穩(wěn)定性分析過程,本文首先考慮集群內(nèi)部只有兩架無人機(jī)i和j的情況,它們?cè)诒舜说目商綔y(cè)距離之內(nèi)。設(shè)x1和x2為系統(tǒng)的兩個(gè)狀態(tài)變量,根據(jù)式(1)有 (19) 將兩機(jī)視為一個(gè)系統(tǒng),考慮系統(tǒng)內(nèi)部狀態(tài)的穩(wěn)定性,由式(1)和式(4)得 (20) (21) 再利用式(7)求負(fù)梯度得 (22) 設(shè)李雅普諾夫函數(shù)為 (23) 對(duì)李雅普諾夫函數(shù)求導(dǎo),得 (24) 將式(22)代入式(24),得 ≤0 (25) 由式(25)知,兩機(jī)速度漸進(jìn)趨于一致,即二機(jī)之間的距離也趨于一定值,系統(tǒng)達(dá)到穩(wěn)定狀態(tài)。 再次假設(shè)集群內(nèi)部有3架無人機(jī),編號(hào)分別為1、2、3,且各自在彼此的探測(cè)范圍內(nèi)。以無人機(jī)2為例進(jìn)行穩(wěn)定性分析,其鄰居為1和3,按上述方法設(shè)狀態(tài)變量為 則 (26) 設(shè)李雅普諾夫函數(shù)為 (27) 則 (28) 用式(26)代替式(28)中速度的一階導(dǎo)數(shù)項(xiàng)得 (29) 令 (30) 設(shè)李雅普諾夫函數(shù)為 (31) 則 …+ (32) 同理,將式(30)代入式(32)得 ≤0 (33) 即系統(tǒng)穩(wěn)定。 為方便對(duì)上述方法的控制效果進(jìn)行分析,本文在Netlogo環(huán)境下進(jìn)行了三維空間的無人機(jī)集群飛行與障礙規(guī)避仿真驗(yàn)證。由于本文提出的控制方法屬于分布式的集群控制方法,集群內(nèi)部的每個(gè)無人機(jī)成員依靠自身的機(jī)載傳感器探測(cè)周圍其他運(yùn)動(dòng)和靜止目標(biāo),生成局部運(yùn)動(dòng)環(huán)境,并自動(dòng)解算和生成相應(yīng)的運(yùn)動(dòng)控制指令,控制自身行為。按著無人機(jī)能否接收航點(diǎn)信息,仿真實(shí)驗(yàn)主要從以下幾方面展開。 情形1集群內(nèi)部無人機(jī)均能獲得實(shí)時(shí)航跡信息,飛行空間無障礙 圖5 無人機(jī)群聚集和沿航跡飛行Fig.5 UAV individual gather and fly along the track 圖6 無人機(jī)之間的距離Fig.6 Distance between UAVs 圖5中紅色曲線為預(yù)先規(guī)劃的航跡,白色曲線為集群內(nèi)部成員的飛行航跡,其初始位置隨機(jī),在接收到目標(biāo)航點(diǎn)信息后朝目標(biāo)位置飛行,逐漸靠近、聚集和形成一整體,并沿著航跡飛行,實(shí)現(xiàn)了集群的群聚和整體運(yùn)動(dòng)控制。 圖6顯示了任意兩機(jī)間距離變化的情況,曲線的走向趨勢(shì)表明:任意兩機(jī)間的距離在初始時(shí)刻最大,隨著時(shí)間的推移逐漸收斂至一恒定值,此時(shí)集群進(jìn)入穩(wěn)定狀態(tài)。在該過程中,由于任意兩機(jī)間的最小距離為7.8 m,大于機(jī)身長(zhǎng)度2 m,因此避免了碰撞的發(fā)生。 圖7 編隊(duì)中心與航點(diǎn)的距離偏差Fig.7 Distance between the formation center and the track point 情形2集群內(nèi)無人機(jī)均能獲得實(shí)時(shí)航跡信息,飛行空間有未知障礙 圖8 集群躲避障礙的場(chǎng)景Fig.8 Scene of UAVs to avoid the obstacles 圖8中黃色的球體即為障礙所在的位置,紅色的曲線為預(yù)先規(guī)劃的航跡,由于規(guī)劃時(shí)不知道未來障礙的突發(fā)位置,所以在預(yù)先航跡規(guī)劃時(shí)未對(duì)障礙1、2進(jìn)行考慮,此時(shí)無人機(jī)對(duì)障礙的規(guī)避將主要依靠機(jī)載的傳感器檢測(cè)系統(tǒng)、障礙規(guī)避算法和其他控制以及執(zhí)行機(jī)構(gòu)。從圖8顯示的各機(jī)航跡看到,無人機(jī)在接近障礙物時(shí)發(fā)生明顯背離障礙的側(cè)向彎曲,即為機(jī)載傳感系統(tǒng)檢測(cè)到障礙和機(jī)體產(chǎn)生的規(guī)避行為,說明各架無人機(jī)能夠依靠自身能力有效避開突發(fā)障礙的威脅;圖9顯示的是集群內(nèi)部各個(gè)成員分別與障礙1和障礙2之間的距離隨時(shí)間的變化曲線,圖9中的2個(gè)最低谷為集群內(nèi)成員分別與障礙1和障礙2最接近的時(shí)刻,由圖9可見,集群內(nèi)部的無人機(jī)仍與障礙物保持10 m以上的距離,有效地規(guī)避了障礙。采用情形1的數(shù)據(jù)分析方法同樣可得各機(jī)間的最近距離為4.3 m,仍大于機(jī)身長(zhǎng)度值2 m,能夠避免集群內(nèi)部成員之間的碰撞。 圖10 集群穿越狹窄區(qū)域Fig.10 Cluster crosses the narrow area 情形3集群內(nèi)部少數(shù)無人機(jī)可獲得實(shí)時(shí)航跡信息,飛行空間無障礙 圖11 基于鄰域辨識(shí)的集群控制Fig.11 Cluster control based on neighborhood identification 從圖11看到,集群內(nèi)部有6架無人機(jī),但只有1架能夠接收航跡信息(標(biāo)注為白色,占群體數(shù)的1/6),采用鄰域跟隨與辨識(shí)的方法為未接收到航跡信息的無人機(jī)選擇跟隨目標(biāo),無人機(jī)能在群聚作用和目標(biāo)無人機(jī)的帶領(lǐng)下從初始狀態(tài)聚集和形成整體運(yùn)動(dòng)。同時(shí),本文也按著文獻(xiàn)[7]的方法對(duì)未接收到航跡信息的無人機(jī)采用群聚作用實(shí)施了控制,雖然也能產(chǎn)生聚集和整體運(yùn)動(dòng)(見圖12),但與圖11相比,飛行航跡過于曲折,對(duì)集群控制與安全不利。相比之下,顯然采用鄰域跟隨與辨識(shí)的方法要好于僅采用鄰域跟隨的方法。 圖12 群聚作用下的集群控制Fig.12 Cluster control under the clustering 本文受群體智能的啟發(fā),研究了無人機(jī)能正常接收和不能正常接收目標(biāo)航跡信息以及空間有無障礙情況下的集群控制問題,應(yīng)用此方法有以下結(jié)論: (1)本文將群聚規(guī)則與勢(shì)場(chǎng)法結(jié)合和改進(jìn)實(shí)現(xiàn)了無人機(jī)的聚集和朝向目標(biāo)的整體性運(yùn)動(dòng),無人機(jī)集群控制的靈活性、一致性和安全性都有了較大提升; (2)由于借助于虛擬無人機(jī)的運(yùn)動(dòng)模擬目標(biāo)航跡,這種類似軟控制的方法可通過修改航點(diǎn)靈活改變集群的飛行航線; (3)本文提出的對(duì)障礙物的應(yīng)急避障方法考慮了計(jì)算機(jī)處理和設(shè)備的執(zhí)行時(shí)間,符合實(shí)際情況。













2 穩(wěn)定性分析







3 仿真實(shí)驗(yàn)驗(yàn)證




4 結(jié) 論
猜你喜歡
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
中外會(huì)展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28