轉(zhuǎn)子時(shí)間常數(shù)對(duì)FOC系統(tǒng)的影響分析及解決方法
2018-09-21 03:26:12何國(guó)鋒
機(jī)電信息 2018年27期
肖 杰 潘 峰 何國(guó)鋒
(1.茅臺(tái)學(xué)院實(shí)習(xí)實(shí)訓(xùn)中心,貴州遵義564507;2.茅臺(tái)學(xué)院釀酒工程自動(dòng)化系,貴州遵義564507)
0 引言
感應(yīng)電機(jī)采用磁場(chǎng)定向控制來調(diào)速,一般需要通過間接磁鏈觀測(cè)器來估算轉(zhuǎn)子磁鏈[1],這種間接觀測(cè)方法卻易受電機(jī)眾多自身參數(shù)影響,其中轉(zhuǎn)子時(shí)間常數(shù)影響最為嚴(yán)重,這導(dǎo)致整個(gè)磁場(chǎng)定向控制系統(tǒng)的瞬態(tài)響應(yīng)性能降低。但是,當(dāng)前離線辨識(shí)方法不能準(zhǔn)確測(cè)定出轉(zhuǎn)子時(shí)間常數(shù),而且增加了額外步驟和不穩(wěn)定因素。即使辨識(shí)準(zhǔn)確,在電機(jī)運(yùn)行過程中,電機(jī)參數(shù)也容易受溫度和頻率等因素影響而改變。針對(duì)上述情況,本文基于模型參考自適應(yīng)系統(tǒng)對(duì)轉(zhuǎn)子時(shí)間常數(shù)進(jìn)行在線辨識(shí),保障系統(tǒng)運(yùn)行參數(shù)的實(shí)時(shí)性和準(zhǔn)確性,提高系統(tǒng)整體穩(wěn)定度。
1 轉(zhuǎn)子時(shí)間常數(shù)對(duì)系統(tǒng)的影響性分析
磁場(chǎng)定向的準(zhǔn)確性是感應(yīng)電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩瞬態(tài)響應(yīng)性能好壞的重要決定因素,而磁場(chǎng)定向不可避免地需要將勵(lì)磁電流和轉(zhuǎn)矩電流完全分離開來。分離過程需要許多電機(jī)參數(shù)參與運(yùn)算,這些參數(shù)對(duì)分離的效果有著至關(guān)重要的作用,其中電機(jī)的轉(zhuǎn)子時(shí)間常數(shù)影響最為重大[2]。
感應(yīng)電機(jī)模型在旋轉(zhuǎn)坐標(biāo)系下,轉(zhuǎn)子磁鏈與電壓方程為:

式中,ψr、Lm、Lr、is、ir、Δω、Rr分別為轉(zhuǎn)子磁鏈、互感、轉(zhuǎn)子自感、定子電流、轉(zhuǎn)子電流、轉(zhuǎn)差角頻率、轉(zhuǎn)子電阻。
聯(lián)立等式(1)和(2)并整理有:

將帶有偏差量的磁鏈代入式(3),并將磁鏈變?yōu)閐q軸分量形式,則有:

由磁場(chǎng)定向調(diào)速的相關(guān)性質(zhì)可知[1],若磁場(chǎng)定向方式采用轉(zhuǎn)子磁鏈定向,且為速度閉環(huán)則有:
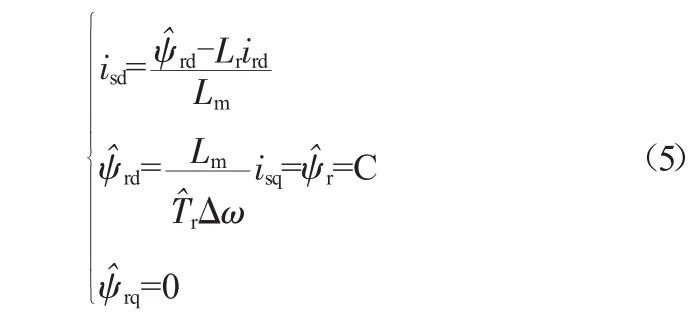
式中,isd、isq為定子電流在dq軸系上的分量;C為常數(shù)。
聯(lián)立等式(5)和(4)并整理后有:
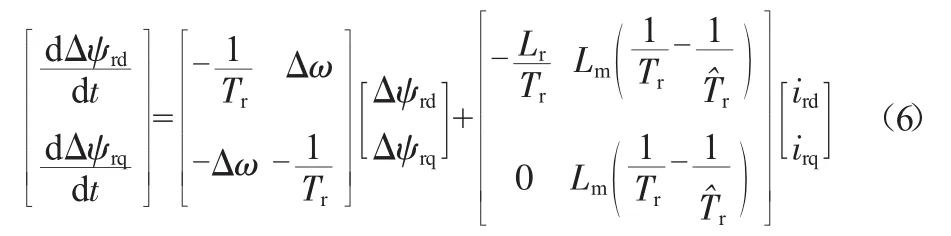
可得微分方程組(6)的特征值為:
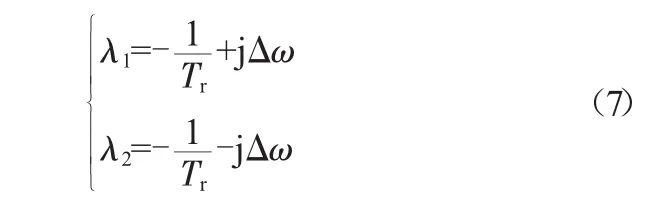
系統(tǒng)無阻尼振蕩角頻率為:

阻尼系數(shù)為:

由等式(8)與(9)可知,帶有因?yàn)檗D(zhuǎn)子時(shí)間常數(shù)變化而造成磁鏈偏差量的磁場(chǎng)定向系統(tǒng),為按指數(shù)(e-ξωnt)規(guī)律衰減的振蕩欠阻尼系統(tǒng)[3]。此外,磁鏈和轉(zhuǎn)矩之間相互影響,則電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩也會(huì)具有相同的波動(dòng)規(guī)律,影響電機(jī)的平穩(wěn)高效運(yùn)行。
2 轉(zhuǎn)子時(shí)間常數(shù)的在線辨識(shí)
2.1 模型參考自適應(yīng)
感應(yīng)電機(jī)數(shù)學(xué)模型是一個(gè)異常復(fù)雜的控制模型且參數(shù)變量多變難以控制,模型參考自適應(yīng)控制系統(tǒng)(ModelReference AdaptiveSystem,MRAS)為這類多變量系統(tǒng)提供了很好的解決方法[4],該方法運(yùn)算簡(jiǎn)單但卻具有很好的控制效果。
MRAS通常由三大模塊構(gòu)成:第一個(gè)模塊由不包含估計(jì)參數(shù)的參考模型構(gòu)成,第二個(gè)模塊由包含估計(jì)參數(shù)的可調(diào)模型構(gòu)成,第三個(gè)模塊為自適應(yīng)機(jī)構(gòu)。其中,前兩個(gè)模塊一般要具有相同的物理含義,且前兩個(gè)模塊的輸出偏差作為自適應(yīng)機(jī)構(gòu)的輸入,最后經(jīng)過自適應(yīng)機(jī)構(gòu)的處理,將輸出反饋給可調(diào)模型,使得估計(jì)參數(shù)不斷逼近真實(shí)參數(shù)。波波夫(Popov)穩(wěn)定性能使系統(tǒng)偏差逼近于零[5],從而MARS最終達(dá)到全局穩(wěn)定,避免因偏差的累計(jì)而受到影響,故本文以波波夫超穩(wěn)定性理論依據(jù)來推導(dǎo)模型參考自適應(yīng)系統(tǒng)的數(shù)學(xué)模型。
2.2 轉(zhuǎn)子時(shí)間常數(shù)在線辨識(shí)數(shù)學(xué)模型
如圖1所示,轉(zhuǎn)子時(shí)間常數(shù)在線辨識(shí)數(shù)學(xué)模型以轉(zhuǎn)子磁鏈為基礎(chǔ),參考模型選用轉(zhuǎn)子磁鏈的電壓模型,可調(diào)模型選用轉(zhuǎn)子磁鏈的電流模型,波波夫超穩(wěn)定性理論作為自適應(yīng)律。

圖1MRAS基本構(gòu)成框圖
電流模型和電壓模型的數(shù)學(xué)表達(dá)式如下:

將估算出的T?r代入等式(10)得到電流模型的轉(zhuǎn)子磁鏈估算表達(dá)式:


上式狀態(tài)變量系數(shù)矩陣為線性前饋環(huán)節(jié),其余項(xiàng)為非線性反饋環(huán)節(jié)。分析可知狀態(tài)方程(13)的線性環(huán)節(jié)嚴(yán)格正實(shí),并且狀態(tài)方程(13)的非線性環(huán)節(jié)滿足波波夫積分不等式的要求[5]。此時(shí),系統(tǒng)的自適應(yīng)律為:

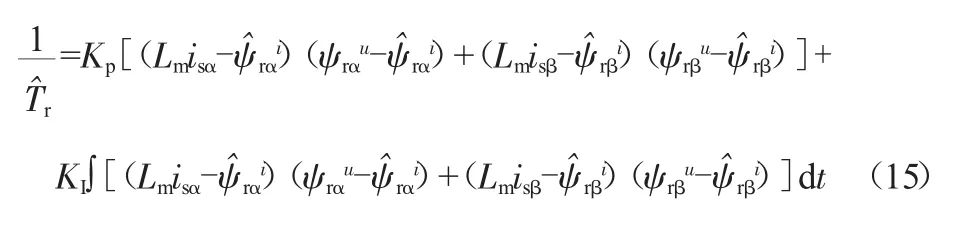
實(shí)際操作中,為簡(jiǎn)化調(diào)節(jié)步驟,提升動(dòng)態(tài)性能,將等式(14)自適應(yīng)律轉(zhuǎn)換成PI調(diào)節(jié)形式。
同時(shí),由于轉(zhuǎn)子時(shí)間常數(shù)沒有參與電壓模型的運(yùn)算,所以將電流模型的轉(zhuǎn)子磁鏈真實(shí)值用電壓模型估算出的轉(zhuǎn)子磁鏈來替換。
則推出最終轉(zhuǎn)子時(shí)間常數(shù)的估計(jì)式:
基于MRAS的Tr在線辨識(shí)模塊如圖2所示。

圖2 Tr在線辨識(shí)模塊
3 仿真分析
為驗(yàn)證Tr的影響性數(shù)學(xué)推導(dǎo)分析和該在線辨識(shí)方法的正確性,利用Matlab/Simulink搭建了一套基于磁場(chǎng)定向控制的Tr在線辨識(shí)系統(tǒng)。仿真選用的感應(yīng)電機(jī)額定參數(shù)為:Pn=4kW,Un=400V,In=8.8A,Nn=1430r/min,RS=1.405 Ω,Rr=1.395 Ω,Lσ=5.839mH,Lm=0.1722H,Tr的倒數(shù)為4.023 Ω/H。
3.1 轉(zhuǎn)子時(shí)間常數(shù)的影響性仿真結(jié)果分析
將電機(jī)的Tr放大3倍,待電機(jī)運(yùn)行1s,電機(jī)穩(wěn)定運(yùn)行后,加入10N·m負(fù)載轉(zhuǎn)矩,電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩仿真波形如圖3所示。

圖3 Tr放大3倍后的影響性分析
從圖3波形可知Tr的變化導(dǎo)致電機(jī)的轉(zhuǎn)矩與轉(zhuǎn)速瞬態(tài)響應(yīng)遲緩,幅值以相同頻率衰減振蕩并逐漸趨于穩(wěn)定。
3.2 轉(zhuǎn)子時(shí)間常數(shù)在線辨識(shí)仿真結(jié)果分析
Tr在線辨識(shí)算法的正確性可從階躍性能和跟蹤性能來進(jìn)行驗(yàn)證。分別模擬電機(jī)啟動(dòng)時(shí)轉(zhuǎn)子時(shí)間常數(shù)初始值未知和電機(jī)在運(yùn)行過程中轉(zhuǎn)子時(shí)間常數(shù)突變兩種情況。
3.2.1 階躍性能
轉(zhuǎn)子時(shí)間常數(shù)初始值放大兩倍時(shí),電機(jī)以1000r/min給定值勻速運(yùn)行至4s時(shí),加入20N·m負(fù)載。在線辨識(shí)算法辨識(shí)所得轉(zhuǎn)子時(shí)間常數(shù)的倒數(shù)波形如圖4所示。

圖4 =2Tr時(shí)的階躍性能波形
分析該辨識(shí)算法的階躍性能波形可知,轉(zhuǎn)子時(shí)間常數(shù)辨識(shí)誤差小,加入負(fù)載時(shí),動(dòng)態(tài)調(diào)節(jié)速度快。此外,啟動(dòng)給定數(shù)值偏離實(shí)際數(shù)值越大,趨于穩(wěn)定的時(shí)間就越長(zhǎng),所以轉(zhuǎn)子時(shí)間常數(shù)離線辨識(shí)的準(zhǔn)確性一定程度上影響了在線辨識(shí)算法的收斂速度。
3.2.2 跟蹤性能
電機(jī)以1000r/min給定值勻速運(yùn)行至4s時(shí),突然將電機(jī)轉(zhuǎn)子時(shí)間常數(shù)放大兩倍。此時(shí),在線辨識(shí)算法辨識(shí)所得波形如圖5所示。

圖5 2Tr時(shí)的跟蹤性能波形
4 結(jié)語
本文先通過轉(zhuǎn)子時(shí)間常數(shù)對(duì)磁場(chǎng)定向控制系統(tǒng)影響的數(shù)學(xué)推導(dǎo)分析,說明轉(zhuǎn)子時(shí)間常數(shù)的準(zhǔn)確性對(duì)系統(tǒng)動(dòng)態(tài)性能效果的重要性。接著,引入基于模型參考自適應(yīng)的轉(zhuǎn)子時(shí)間常數(shù)在線辨識(shí)算法,解決了離線辨識(shí)算法存在的現(xiàn)有問題。從影響性分析仿真結(jié)果可知該辨識(shí)方法具有較好的實(shí)時(shí)性和準(zhǔn)確性,能夠應(yīng)用于磁場(chǎng)定向調(diào)速系統(tǒng)的轉(zhuǎn)子時(shí)間常數(shù)在線辨識(shí)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
華人時(shí)刊(2020年13期)2020-09-25 08:21:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24
