蛇形微型探測器探究
2018-09-22 04:33:50章程
機電信息 2018年27期
章 程
(江蘇省海安高級中學,江蘇南通226600)
0 引言
傳統的移動機器人無法適應復雜環境,特別是自然災害造成的廢墟罅隙空間。近年來,有學者研究了蛇形機器人,利用其身體纖細、橫截面小的特點,能夠進入一般機器人無法到達的地方,甚至是人類不宜工作的某些區域,深入探測,配合外圍人員了解災情,對解救傷員起到積極作用。因此,小巧的結構和靈活的運動方式成為此類機器人研究的重要方向。
國外學者對蛇形機器人的三維步態動力學模型有所研究,G.Chirikjian[1]、R.Hatton[2]分別建立了螺旋側移運動動力學模型以及軀體與地面接觸點與側移運動橢圓曲線之間的幾何關系,H.Yamada[3]提出了弧形連桿結構,使蛇形機器人運動曲線更為平滑。國內學者孫洪建立了攀爬蛇形機器人的數學模型[4]。本文側重研究蛇形探測器的三維運動方式及其前進與后退原理,使其能適應復雜的工作環境。
1 蛇形探測器結構設計
蛇形探測器采用模塊式結構,具有較好的靈活性。每個軀塊安裝有兩個可正反轉的驅動電機,實現探測器的三維空間運動。所設計的蛇形探測器結構如圖1所示,電機安裝方式如圖2所示。

圖1 蛇形探測器結構

圖2 電機安裝圖
該探測器具有雙向行進的功能,兩端都可作為主動力,若一端被卡住,不能正常前進,另一端擔負起提供動力的責任,反方向解救出探測器。雙向動力設計使探測器運動更加靈活,可以避免其在復雜地形下出現纏繞的情況。
2 蛇形探測器運動分析
蛇形探測器的運動狀態主要歸結為4種形態:未驅動狀態、拱起狀態、推進狀態和扭動狀態。蛇形探測器每個軀塊的周身外表(前后兩面除外)設計有8個可以前后擺動的小爪,模仿蛇的剛毛。蛇形探測器的行進主要依靠摩擦阻力矩,當所有小爪置為后傾狀態時,在各電機的協同作用下,蛇形探測器可以前進,反之,蛇形探測器可以后退。以7個活動軀塊,其中3個軀塊拱起為例,分析蛇形探測器爬行運動受力情況。
2.1 未驅動狀態
蛇形探測器未驅動時運動狀態(即初始狀態)呈直線排列,如圖3所示。

圖3 蛇形探測器未驅動狀態示意圖
設每個軀塊質量相同為m,摩擦力為f,軀塊長度為L,小爪后傾時軀塊與地面摩擦系數為μ,軀塊間間隙忽略不計。要使蛇形探測器運動,必須滿足下列條件:

2.2 拱起狀態
將各軀塊小爪置為后傾狀態,前進摩擦阻力則小于后退摩擦阻力。軀塊1和軀塊2保持不動,同時控制軀塊3、軀塊4和軀塊6上的外殼旋轉電機,使軀塊3以軀塊2和軀塊3的鏈接點為支點,產生逆時針轉矩,此時軀塊3、軀塊4和軀塊5呈拱起狀態,拖動軀塊6、軀塊7前進。蛇形探測器拱起狀態受力分析如圖4所示。
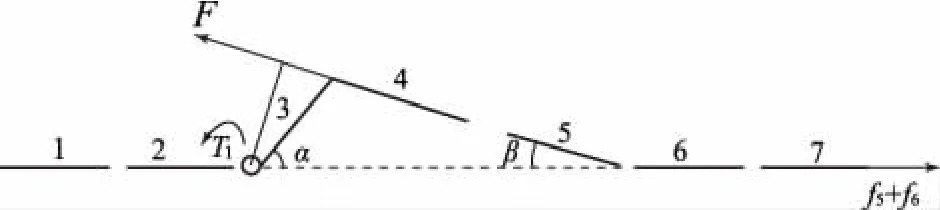
圖4 蛇形探測器拱起狀態受力示意圖
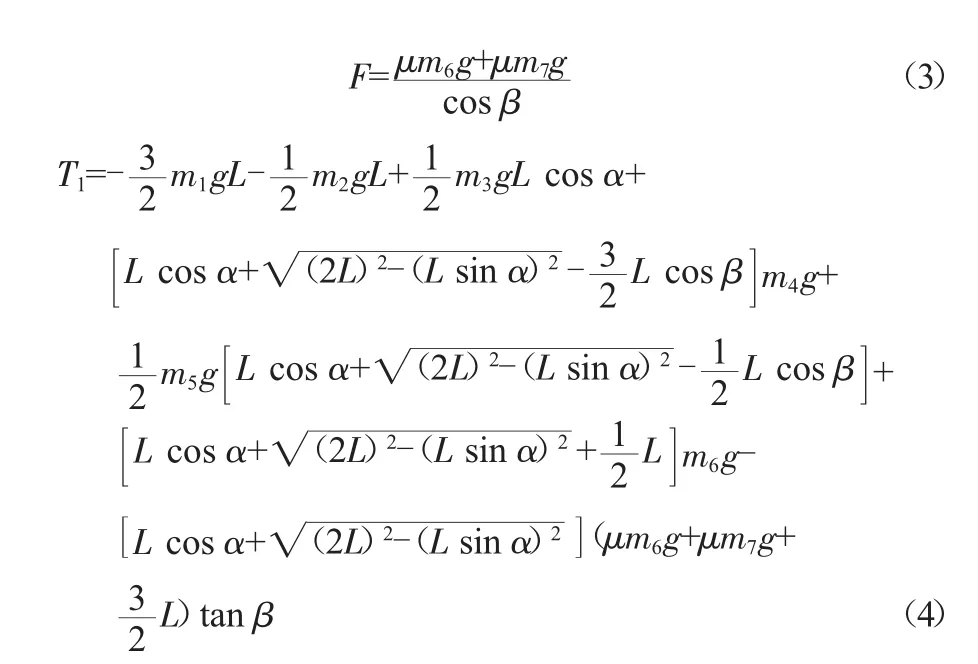
要使蛇形探測器前進,軀塊3上端必須產生拖動力F,所以軀塊3中的電機必須產生摩擦阻力矩T1:

2.3 向前推進狀態
與拱起狀態原理類似,同時控制軀塊3、軀塊4和軀塊6上的外殼旋轉電機反方向旋轉,由于各小爪處于后傾狀態,軀塊1和軀塊2向前的阻力小于軀塊6和軀塊7向前的阻力,所以當軀塊3、軀塊4和軀塊5回位時,可以推動軀塊1、軀塊2前進,如圖5所示。
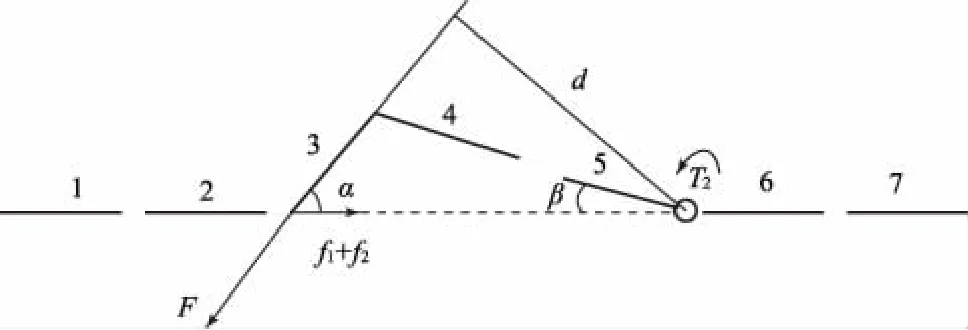
圖5 蛇形探測器推進狀態受力示意圖
回位力矩T2的計算公式如下:

2.4 扭動狀態
拱起狀態是蛇形軀體垂直于水平面上下彎曲,而扭動狀態是蛇形軀體在水平面彎曲。扭動狀態時,各小爪也必須處于后傾狀態,同時控制軀塊3外殼旋轉電機和外殼擺動電機以及軀塊4和軀塊6的外殼旋轉電機,此時軀塊1和軀塊2向前的阻力小于軀塊6和軀塊7向前的阻力,所以當軀塊3、軀塊4和軀塊5左右扭動時,實現2次前進動作。
上述4種運動狀態的有機組合,結合小爪的前傾與后傾狀態,可以實現蛇形探測器三維空間靈活進退運動。
3 蛇形探測器工作原理
3.1 探測功能
蛇形探測器除了具有三維運動特點外,還具有多項探測功能。可在蛇形探測器上安裝多種傳感器,如北斗定位模塊、光敏傳感器、聲波傳感器、紅外傳感器、微型攝像頭等。探測器工作時以聲波傳感為主,在地下救援中若紅外和聲波信號同時顯現時,探測器會自動進行主輔選擇,優先以聲波信號進行探測。另外,其裝有生命探測裝置,可感應人體所發出的超低頻電場,找到被困人員的位置,可防錯誤識別其他生物發出的聲音,影響救援速度。探測器上的紅外測距傳感器協助探測器躲避障礙,提高救援效率。探測器上的微型攝像頭可以將廢墟下的情況拍攝記錄。探測器采用2.4 GHz無線網絡技術與搜尋人員手持式終端進行通信,將救援情況傳遞給外部工作人員,實現人機交互,制定相應救援措施。
3.2 雙向行進功能
廢墟之中就像一個迷宮,蛇形探測器前行時容易把自己繞進去,所以采用雙向行進方式,自動調節前行的角度,通過算法控制,蛇身拱起與回位,結合小爪前傾或后傾結構,完成向前推進或向后行進動作,避免了碰上死路而無法回頭的狀況。
蛇形探測器結合光敏傳感器,在探測結束時可以根據微弱的光芒找到出口,無需擔心探測器丟失。在漆黑的礦井,或者較深的廢墟中沒有光源指引時,探測器會根據自動記憶所有路線、雙向移動功能引導設備安全返回。整個行進過程由蛇尾的電池模塊帶動電機作為驅動力。
4 應用前景
在“以人為本、科技強警”的現代化時代,救援過程就是與時間的競賽。近年來多發的自然災害,如地震、火災、洪水,人為的恐怖活動、武力沖突,由生化病毒和有毒物質、輻射性物質等帶來的災害,威脅著人們的安全,如果僅靠人工救援,不僅延誤了最佳的救援時間,還會造成無謂的人員傷亡。
本文設計的蛇形微型探測器,可以在災難發生后,廢墟下存在多種不確定因素,救援工作難以展開時,快速進入廢墟罅隙進行生命體征和傷亡情況探測,不僅給救援人員爭取了更多的時間,還使得被困人員多了一線生機。該蛇形微型探測器,具有較強的靈活性,能夠適應多種復雜環境,可以在災難救援工作中發揮重要作用。
