基于NI運動控制卡的多軸運動控制研究
2018-08-15 02:18:14劉豐豪崔思柱
現代制造技術與裝備 2018年7期
劉豐豪 程 石 崔思柱 曹 翱 肖 倩
(長安大學 工程機械學院,西安 710064)
隨著工業技術特別是自動化技術的迅速發展和更新換代,現代工業設備對于運動過程中的精度控制要求越來越高。但是,工業產品的質量要求和工藝技術十分復雜,一臺電機已經遠遠不能滿足生產設備的要求,這就迫切需要協調多個電機一起運動實現工作要求。而在多個電機完美協調運動的背后,需要高級的硬件控制設備及精密的運動控制算法來實現。傳統老舊的控制方式或者說是對于精度要求不高的場所,往往采用微機或單片機的控制方式來實現位置控制,位置精度很低,整機設計復雜且運行速率很慢[1-2]。因為這種工作方式效率低下,人們研發出一種先進的方式——“PC+運動控制卡”。Labview作為一種簡便高效的圖形化編程語言,可以非常快速地實現程序的編寫、軟件開發,操作界面清晰明了,通過對運動控制卡的實時控制來實現對于單個或多個伺服電機的精確位置控制[3]。
1 運動控制發展
運動控制技術的發展不僅代表著工業技術的發展水平和行業的興衰,也促進了人類社會生產勞動的進步。運動控制技術于20世紀40年代產生,到今天越來越趨于數字化、網絡化以及智能化,可以說運動控制發展反映出了現代工業的前進方向和發展趨勢。但是,對于智能化工業,單一的控制方式無法滿足快速發展的工業技術要求,因此為了實現多軸運動控制,世界各地的企業都開始進行多軸運動控制器的研發與生產。通常來說,一個完整的運動控制系統硬件主要包括以下幾部分:上位控制器、驅動裝置、電機、執行機構以及檢測反饋元件等。
2 硬件框架搭建
硬件設備主要來自于NI公司的PXI控制系統系列,主要有PXIe-1071機箱、PXIe-8821控制器、PXI-7358運動控制卡、PXIe-1071機箱、UMI-7774運動接口板以及第三方公司的驅動器與伺服電機等。其具體控制平臺搭建如圖1所示。
PXIe-1071是一款具有4個插槽、高達3GB/s的PXI機箱。PXIe-1071機箱的4個外設插槽都為混合兼容的,支撐PXI和PXIe模塊,在此平臺中內插PXIe-8821控制器以及PXI-7358運動控制卡。
PXIe-8821是基于Intel Core i3的PXI嵌入式控制器。PXIe-8821包含一個10/100/1000 BAsE-TX(千兆位)以太網端口、兩個高速UsB端口、兩個UsB 3.0端口以及一個集成硬盤驅動器、串行端口和其他外設I/O。
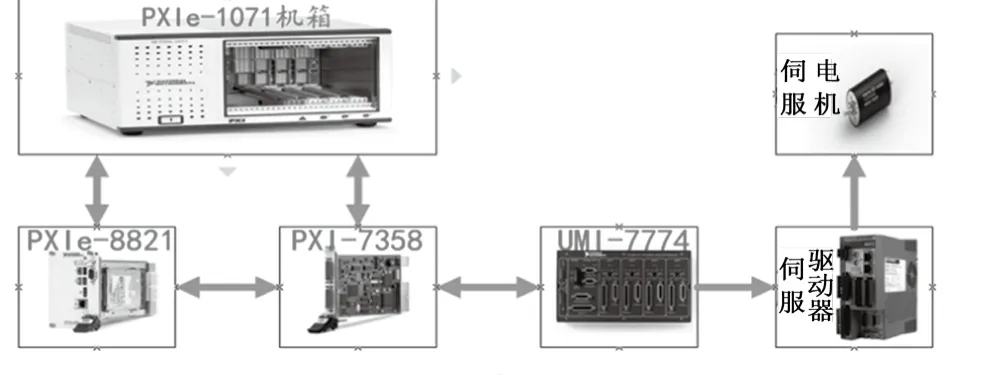
圖1 硬件框架控制平臺
在NI的7350系列中,無論是在控制電機軸的數量上,還是能夠實現的功能上,PXI-7358都是最優秀、最高級的運動控制卡。一方面,PXI-7358運動控制卡提供完全可編程的運動控制,可用于多達8個獨立軸的運動控制;另一方面,PXI-7358是擁有雙處理器的運動控制卡,被用于嵌入式實時控制。
UMl-7774作為一款獨立的連接附件,其設計就是為與PXI 73xx系列運動控制器一起使用,最多可同時使用四個軸。UMI-7774非常適合工業和實驗室應用,將第三方步進和伺服驅動器(放大器)以及反饋和數字I/O連接至運動控制器。
3 軟件系統開發
本次程序框架采用圖形化編程語言Labview進行人機交互界面和系統程序開發,通過NI-Motion驅動進行運動程序編寫,通過其配置軟件MAX對系統參數及功能進行設置或修改。為了讓用戶更好地開發和編寫運動控制程序,Labview軟件中自帶的73xx模塊提供了許多可直接調用編寫的封裝式函數,編寫程序只需要根據實際的運動軌跡要求和其他功能要求,直接拖動相應的函數模塊便可實現要求的運動功能以及編寫可操作化的用戶界面,73xx模塊主要包括:Initialize Controller、Axis & Resource Congiguration、Trajectory Control、Motion I/O 和Find Reference等。
3.1 系統參數配置
NI公司提供MAX配置軟件,作為運動控制的第一步,通過在MAX頁面上配置運動控制卡相關選項以設定自己系統各軸的參數,包括各軸的反饋參數設定以及程序控制周期等,根據實際控制需求進行單軸、雙軸以至最多八軸的電機配置連接,實現多軸電機的運動測試。
3.2 單軸直線運動
基于位置的直線運動,從指定初始位置開始移動,通過加載加速度、速度等移動約束,最終到達指定的目標位置而生成運動軌跡。圖2為自定義設置終點位置實現的單軸直線運動程序及軌跡。
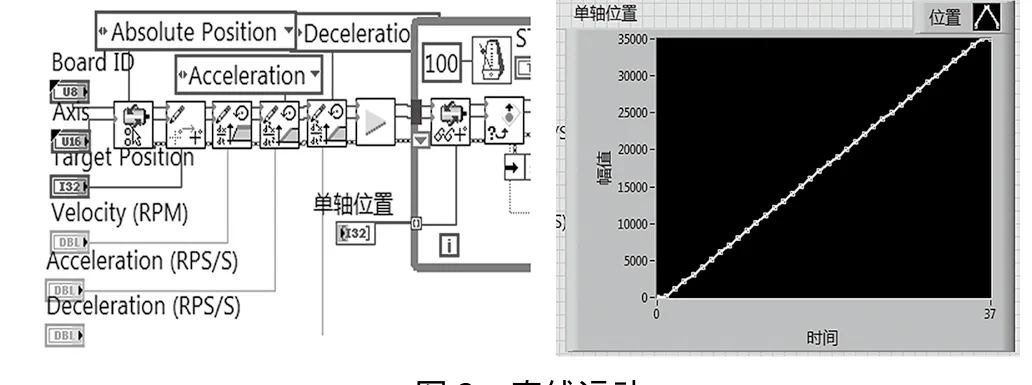
圖2 直線運動
3.3 兩軸圓弧運動
圓弧運動通過在兩軸構成的向量坐標空間——XY平面內進行運動,其移動路徑由半徑、起始角度以及行程角度確定。另外,同單軸的直線運動一樣,圓弧運動也可以設置速度及加速度等移動約束。其兩軸運動控制程序及前面板實際移動軌跡如圖3所示。
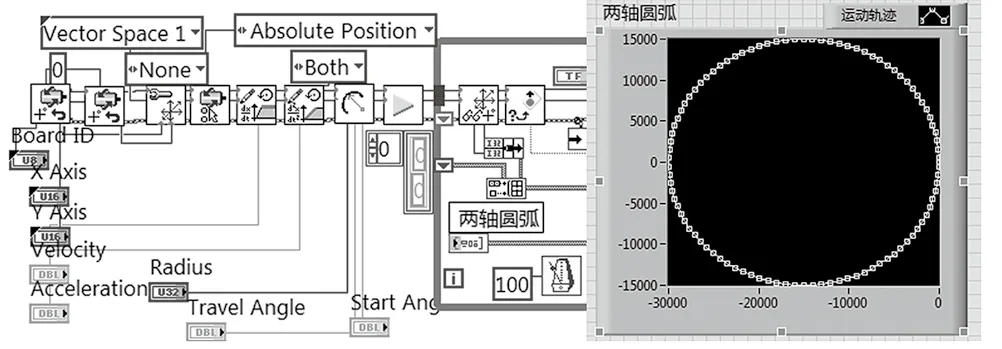
圖3 圓弧運動
3.4 三軸螺旋線運動
螺旋線運動是在三維坐標空間中定義一個由弧組成的圓在XY平面中,并在Z軸上同步線性運動。弧是由半徑、起始角度、行程角度和Z軸線性行程指定,線性行程是Z軸上螺旋弧所穿過的直線距離。圖4即為螺旋線運動程序及軌跡。
4 結語

圖4 螺旋線運動
在“PC+運動控制卡”的控制模式下,人們實現了單軸、雙軸及多軸運動的電機運動控制。由此可見,這種控制模式不僅能夠滿足現代工業的多種運動控制需求,而且簡便高效、執行效果完美。一方面,運用具有開發人機交互界面優勢的圖形化編程語言Labview和調用NI自帶的73xx函數庫,大大加快了程序編寫及開發速度,最重要的是在滿足控制多個電機的前提下,依然能夠完成多種運動軌跡,保障位置控制的需求精度。另一方面,對于后期的總體控制程序,對上述多種運動控制程序的模塊化封裝及調用,可以大大縮減開發周期及用戶成本,提升程序編寫效率,構建簡潔明了的用戶界面。
