基于大數據產業化的青島地鐵機自中心技術分析
2018-08-15 02:18:04孟憲磊
現代制造技術與裝備 2018年7期
關鍵詞:系統
孟憲磊
(青島地鐵集團有限公司運營分公司機電部,青島 266031)
1 地鐵機電系統技術現狀
當前,各地地鐵機電系統大致分為通風空調系統、低壓配電系統、給排水系統、電扶梯系統以及站臺門系統[1]。在青島地鐵的機電系統中還包括綜合監控系統、BAs、FAs、氣體滅火系統和門禁系統。各地地鐵在技術分析大多采用數量統計法、實地勘察法,隨著近年來輕軌振興,R型地鐵廣泛興起,R型廣泛應用于鄉村振興,相比技術采樣相對偏遠、傳統技術手段相對薄弱,在日新月異的技術革新中虛擬現實技術正以低成本、高標準的姿態躋身于機電創新領域。本文采用虛擬現實技術應用于當前地鐵機電系統中,彌補了傳統分析中事必躬親地域的不足,同時節省了人力與物資。
2 典型性分析
2.1 主體介紹
青島地鐵車站動力電系統采用380V三相五線制、220V單相三線制方式進行供電,系統范圍大致包括站臺層、站廳層和設備及管理用房的環控、排水、消防、電梯、自動扶梯、自動售檢票及通信、信號、站控室等系統動力設備的供配電和車站環控室所供配電設備的電控控制。氣體滅火系統由管網子系統和報警控制子系統兩部分組成[2]。
就當前機電測試中,采用虛擬現實技術設計了一種新的機電測試骨架方案,其設計的骨架三維模型如圖1所示。此方案記為方案A。A方案最大的優點就在于彈性條的材料可以不斷選擇。但是,隨著動作組的不斷進行,A方案中的兩板與彈性條的鏈接松動比較嚴重,這需要在技術上不斷改進。

圖1 主體骨架A方案三維簡化圖
根據機械設計的程序,通過對該方案技術評價之后,設計了更合理的方案B。B方案的設計是隨著試驗的不斷進行設計出來的,在B方案中骨架材料又進行了改進,采用了一種新型的材料作為主體骨架材料。這種材料是一種新型的多孔彈性高分子材料,相對于A方案而言,B方案中的骨架系統在執行動作時,變形效果良好,且需要的動力小,更加理想可行。
圖2 B方案三維模型圖
2.2 驅動方案
本文設計的機電驅動模式為:由兩臺直流電機來控制兩個主動輪,通過改變輸出電壓的極性來控制兩輪的轉向,從而實現前進、后退、加減速及轉向幾種不同運動狀態的變化。電機轉速與控制電壓的關系表示為:

公式1中,n為直流電機轉速,K為比例系數,U為直流電機的電壓,C為常數。由式(1)可知,通過調節控制電壓即可調節電機的轉速。電機通過螺絲與卡板固定在娛樂機器人底部,靠電機驅動板輸出的電壓信號驅動,電機輸出軸通過連接器與車輪相連,二者軸線平行。硬件驅動方案如圖3所示。

圖3 驅動方案硬件連接圖
2.3 控制系統設計分析
控制系統的設計作為機電系統設計中的關鍵部分,可以使其他系統按照一定的規律和順序運行[3]。系統的設計方案如圖4所示。

圖4 系統方案框圖
需要指出的是需求分析在每個模塊分別進行了分析,不再單獨列出。系統測試在上位機軟件設計完成后進行了測試,骨架動作測試和避障試驗中也進行了控制系統的測試。采用此方案設計的控制系統,具有結構模塊化、二次開發擴展能力強的特點。而且,軟硬件系統的設計交互進行,在整個設計過程中都可以進行軟硬件調試,能夠提前發現和解決問題,避免了最終出現嚴重錯誤[4]。
2.4 硬件系統搭建
控制系統硬件平臺的搭建對于機電系統整體性能、開發成本、運行穩定性都起到決定性作用,無論是電機控制卡、電源模塊還是傳感器信號轉換模塊都已經有很多成熟的產品供選擇,所以,本文主要采用硬件模塊拼裝,自主開發各模塊的通訊連接程序來完成硬件系統的搭建,圖5為硬件系統拓撲圖。
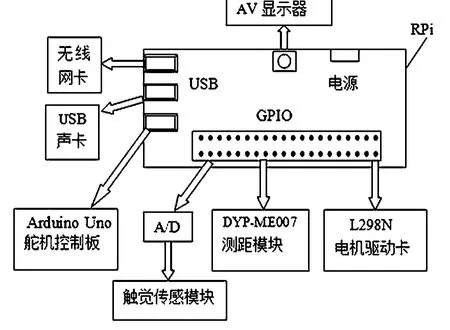
圖5 硬件系統拓撲圖
2.5 供電方案
本文為提高測試系統移動的靈活性,機電模型采用內置可充電蓄電池供電,蓄電池直接提供一組DC12V電壓給顯示器供電,另外產生一組12V電壓輸入至三個型號為LM2596s-ADJ的直流調壓模塊,其輸出電壓可調并帶有穩壓模塊,三個調壓模塊分別輸出5V,5V,9V的電壓給主控制系統、電機、舵機控制卡供電。為避免電機正常工作時對整個系統電源品質的影響,所以,輸出了兩路5V電源,一路給主控系統供電,一路給電機控制電路供電,電機控制電路帶有光電隔離。可充電蓄電池的容量為7200mA·h,額定電壓DC12V,最大電流3A。選用的LM2596s-ADJ是超小型調壓模塊,便于安置在測試系統內部,輸入電壓為3~40V,可輸出1.5~35V連續變化的直流電,最大輸出電流為3A。經實際測試使用,可滿足本文設計的測試系統連續穩定使用1h以上。供電方案如圖6所示。

圖6 供電方案框圖
舵機的控制采用樹莓派與舵機控制板通訊的方式控制,兩者是主從關系,樹莓派是控制核心,舵機控制板作為從機,只能執行接收到的上位機命令或事先存儲的動作組程序,不具有思維能力。
樹莓派與Arduino Uno的通訊連接方式最常用的是GPIO串口(TTL)連接和UsB口連接這兩種方式。第一種的接線是將舵機控制板的串口(RXD、TXD、GND)和樹莓派GPIO模塊上的串口(RXD、TXD、GND)對接,因為舵機控制板的串口電壓為5V,樹莓派的引腳電壓為3.3V,所以中間需要有邏輯電平的轉換;第二種的接線只需用UsB線把兩塊板的UsB口對連即可。
本文設計的機電系統選用了兩個直流電機作為移動的執行元件。通過分析,雖然可以用樹莓派自帶的GPIO引腳直接驅動電機的轉動,但驅動電機需要相對較大的電流,為避免樹莓派因輸出電流過大而燒壞,中間需要連接一個驅動器。本文選用了專用的L298N電機控制模塊。電機控制的系統流程圖如圖7所示。
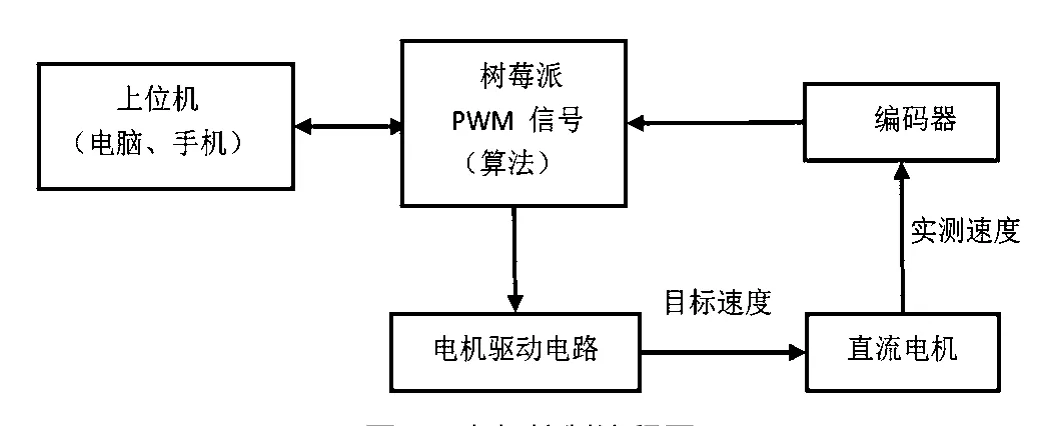
圖7 電機控制流程圖
電機驅動中,由樹莓派給L298N電機驅動模塊發送PWM信號實現直流電機啟停、加減速和正反轉的控制。L298N驅動模塊采用sT公司生產的L298N直流電機驅動芯片,可同時獨立驅動兩臺直流電機,引腳如圖8所示,IN1、IN2控制電機M1;IN3、IN4控制電機M2。該模塊控制信號電壓為DC5V,額定電流2A,工作電壓范圍3~46V。
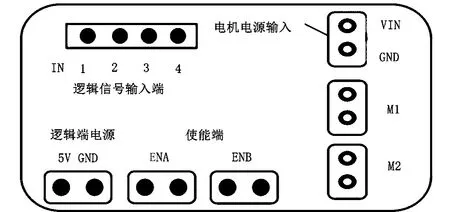
圖8 L298N芯片引腳定義
2.6 主體骨架有限元模型
選取了3個節點進行分析。圖9為系統單元示意圖。在該系統中,從位置A開始運動,平動到位置B,發生彈性變形到位置C。

圖9 有限元模型
任意位置的位移向量:

公式分別計算了柔性機器人在平動和彈性變形中的線位移和角位移,U指的是任意截面的總位移,β是任意截面的總轉角,是彈性變形引起的線位移,βf是是彈性變形引起的轉角。在用節點位移分別表示角位移β、橫向位移W、軸向位移V如下:

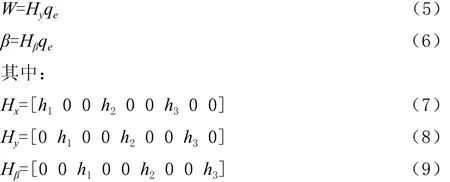
h1、h2、h3均為拉格朗日函數,qe=[V1W10 V2W20 V3w30]T,主要是指節點位移向量。
拉格朗日運動方程式一般情況下可表示為:

式中,K指動能;P指的是位能;L看作是拉格朗日算子。
在動能和勢能的分析中,將兩個公式聯立之后代入拉格朗日方程,即可求得所需方程組。
qte是與qe相對應的骨架單元轉動時的位移在局部坐標的表述,不難得出:

將式(10)~式(12)代入拉格朗日方程:

得到單元動力學方程:

式中,fin、fex分別代表相鄰單元作用力以及單元所受外力。需要指出的是對于動力學方程的建立,亦可以用拉格朗日乘子法建立動力學方程,但方程非常復雜繁瑣。采用傳統的拉格朗日乘子法對方程的推導時,需要考慮主體骨架的彈性變形以及彈性振動,這種算法比較復雜,在此不再進行闡述。
2.7 分離拉弧試驗
該機電系統中主回路電路圖如圖10所示。
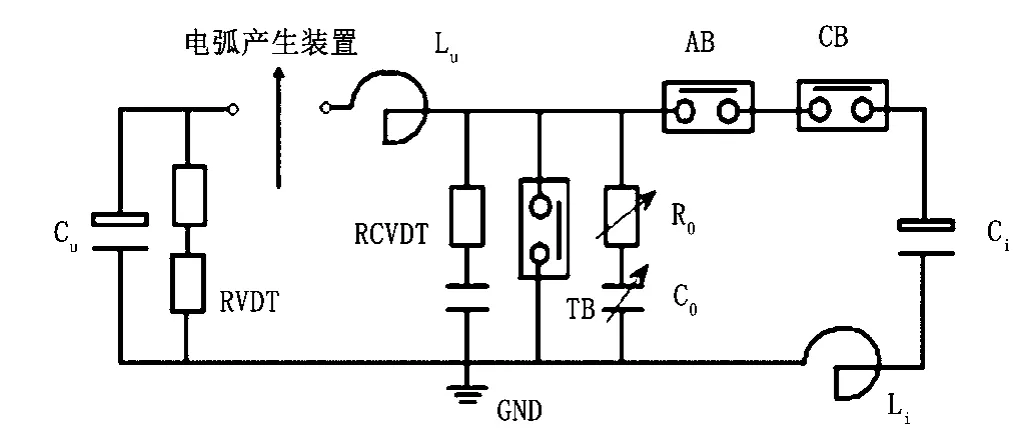
圖10 合成回路原理圖
圖10所示為一個簡單的合成回路主回路,Cu和Lu分別為電壓源的電容和電感,振蕩即會產生工頻恢復電壓,cu和Lu的電容值和電感值參數需要合理配置,Ci與Li分別為電流源的電容和電感,振蕩產生工頻試驗電流。其中RVDT、RCVDT分別為1:1000的電阻分壓器與阻容分壓器,R0、C0分別為調頻電阻和調頻電容,使試品斷路器TB兩端暫態恢復電壓的峰值和頻率得到改變。試驗時主要是控制好四個時序,即CB、AB、TB和TR。CB、AB、TB的最初工作狀態為分、合、合,當開始試驗按鈕被按下后,經過合閘斷路器的固有合閘時間后CB關合,從而引發Ci放電將短路電流引入電流回路,此時TB中將會通過工頻試驗電流。以電流波形開始為時間基準,則在波形開始后7.5ms處應該實現AB分閘,在波形開始后8.0ms處應該實現TB分閘。與此同時,控制點火觸發,暫態恢復電壓串入TB,試驗完成。實驗裝置如圖11所示。
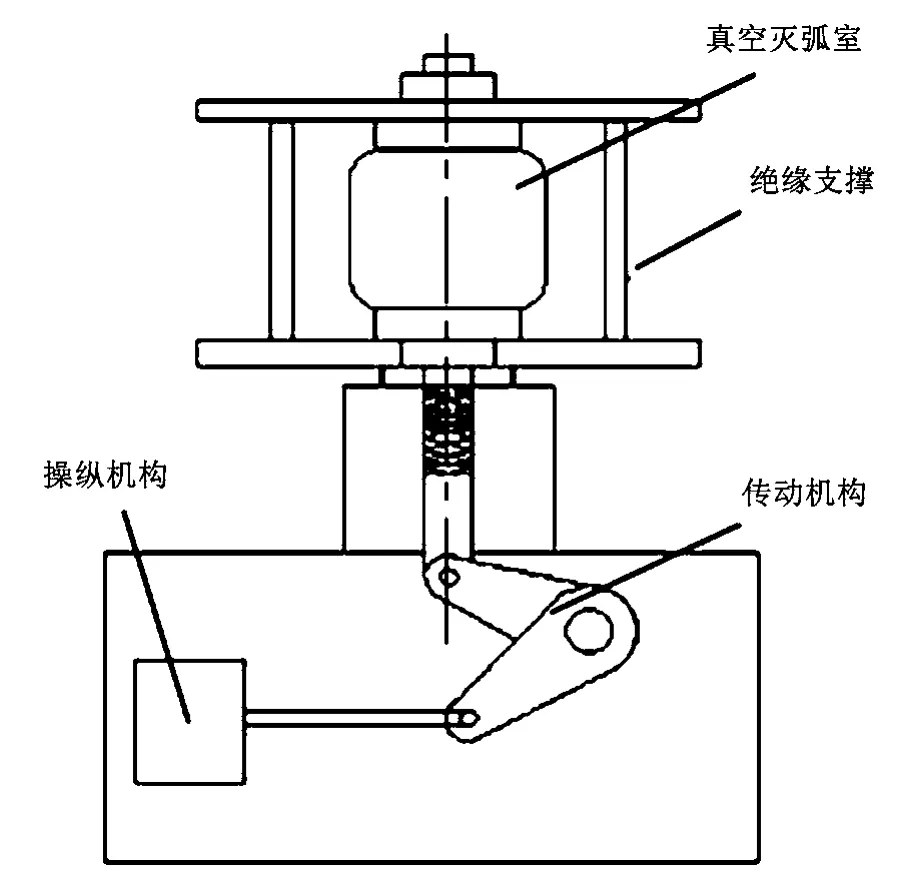
圖11 拉弧裝置
觸頭運動圖像采集系統的結構簡圖如圖12所示,觸頭圖像采集系統主要由可拆真空滅弧室及操動機構、高速攝像機、計算機、機械泵和擴散泵組成。其中,可拆卸真空滅弧室與普通滅弧室差別在于其設置兩個觀察窗口,采用不銹鋼材料制成,且比普通滅弧室大1~2倍,以防止大量金屬蒸氣凝結而影響拍攝效果。通過透明的觀察窗口,攝像機可拍攝下觸頭運動序列圖像;圖12中所示機械泵和擴散泵的作用是保持真空滅弧室中的真空度不低于6.66×10-2Pa。系統工作原理是,系統啟動時,計算機控制操動機構動作,操動機構帶動絕緣拉桿運動使觸頭開合,計算機控制攝像機開始同步拍攝,保證觸頭運動過程得到完全記錄。
3 結語
本文采用虛擬技術構建機電模型,將動力學分析應用于青島地鐵機電系統的研究方法,在分析中利用幀間圖像、可控性搭建等方法,解決當前青島地鐵機電技術分析中“難操作、難定性、難試驗”的核心問題,為下一步地鐵運營的機電科研技改打下堅實基礎。
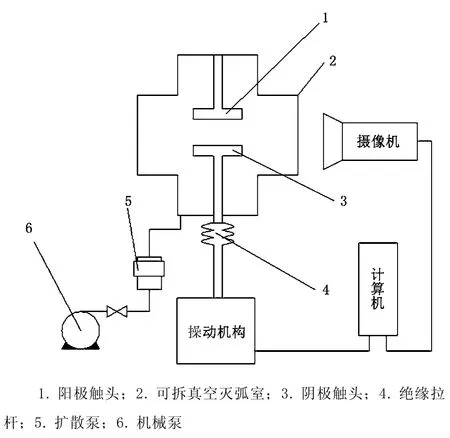
圖12 觸頭圖像采集系統
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
