基于間接標定法的結構光視覺檢測系統三維測量技術與試驗評估
2018-08-15 02:17:50羅凱璐惠記莊楊永奎
現代制造技術與裝備 2018年7期
羅凱璐 惠記莊 劉 瓊 楊永奎
(長安大學,西安 710064)
結構光視覺三維測量具有非接觸、動態響應快、系統柔性好、成本低以及體積小等特點,目前已經廣泛應用于產品加工質量控制和快速設計、自動控制、物體識別以及汽車、醫學等領域[1-4]。線結構光測量是基于激光三角法原理的一種非接觸式測量,其原理是激光器產生線激光照射到被測物體上,通過攝像機從一定角度獲取被測物體調制后的光條信息,最后依據攝像機光條信息反求線激光照射處被測物體的三維坐標[5-7]。該技術較之于雙目視覺測量技術解決了雙目視覺技中存在的特征點匹配問題,但增加了光平面的標定問題。目前,常規標定法如拉絲法和鋸齒法的缺陷:標定點的三維坐標點的獲取需要借助昂貴的外部測量設備,并且獲取的標定點數目有限,標定精度也有限[8-9]。徐光祐和Huynh等人為了獲得更多精確的標定特征點,提出了運用交比不變原理的標定特征點提取方法[10-12]。魏振忠在徐光祐的研究基礎上進行優化并提出了一種雙重交比不變的算法,該算法提高了標定精度,穩定性好,但遮擋問題導致較難獲得準確清晰的圖像[13]。周富強針對光平面的標定,提出了一種自由移動平面靶標定法,算法復雜[14]。為此,本文提出了一種基于定向移動平面標靶的光平面間接標定法。該算法通過特征加窗提取技術提高了算法速度和檢測實時性,相對于立體標靶,該方法靶標制作的要求較低,操作簡單容易實現,光平面參數的標定精度得到一定提高。
1 基于定向移動平面標靶的間接標定法
間接法標定結構光視覺檢測系統,是指對結構光光平面采用間接標定的方法。由于人工測量誤差和儀器自身的測量誤差,光平面標定的準確性容易受到影響。本文首先通過圖像處理方法獲取平面標靶上標定點的像素坐標,結合已經完成標定的攝像機參數值,反解得到表定點的三維世界坐標。算法流程如圖1所示。
1.1 光條中心線提取
通過基于背景校正Otsu的形態細化算法提取標靶在世界坐標系下不同位置Zi的光條中心線,其中Zi為標靶平面在世界坐標系下Zw軸上的位置,位置變換的多少影響算法的準確性。綜合考慮算法的運算速度和準確性要求,本文選取兩個不同位置Z1、Z2,且Z1、Z2為已知定值。
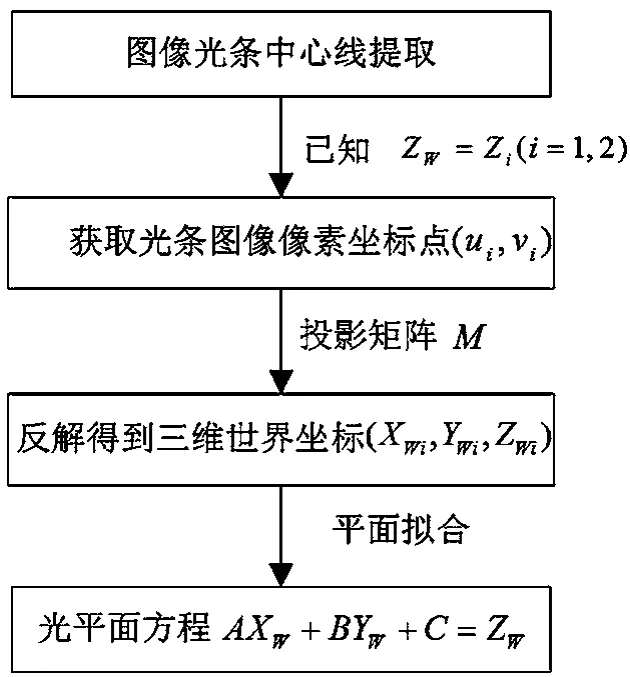
圖1 基于定向移動平面標靶的間接標定法
1.2 獲取光條圖像像素坐標點
利用圖像處理算法中gainput函數分別在每個光條上提取m個標定特征點像素坐標(ui,vi),其中,i=1,2,3,…,2m,像素坐標點(ui,vi)對應的圖像坐標點(xi,yi)關系式為:

考慮攝像機鏡頭的畸變因素,利用求得的實際圖像坐標點(xi,yi)解得其對應的理想狀態下的圖像坐標點,yi):

將獲得的畸變因素矯正后的圖像坐標點(x-i,y-i)反解,獲得對應的理想狀態下的圖像像素坐標點

1.3 反解對應的三維世界坐標點
由圖像坐標和世界坐標的關系式:
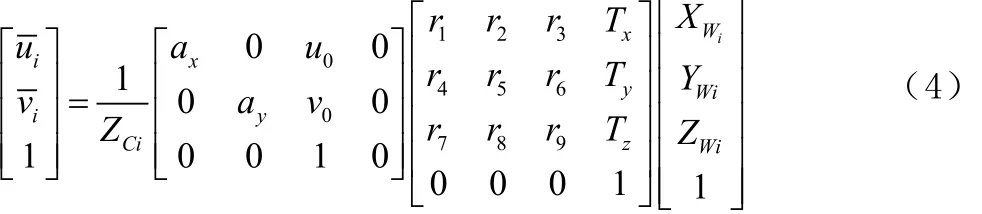
消去Zci后得到:

分別將Zwi=Z1,i=1,2,3,…,m和 Zwi=Z2,i=m+1,m+2,m+3,…,2m以及其分別對應的圖像坐標點(,)帶入式中求解,攝像機的內外參數已知,于是可以解得對應的三維世界坐標點(Xwi,Ywi,Z1),i=1,2,3,…,m和(Xwi,Ywi,Z1),i=m+1,m+2,m+3,…,2m。
1.4 光平面擬合
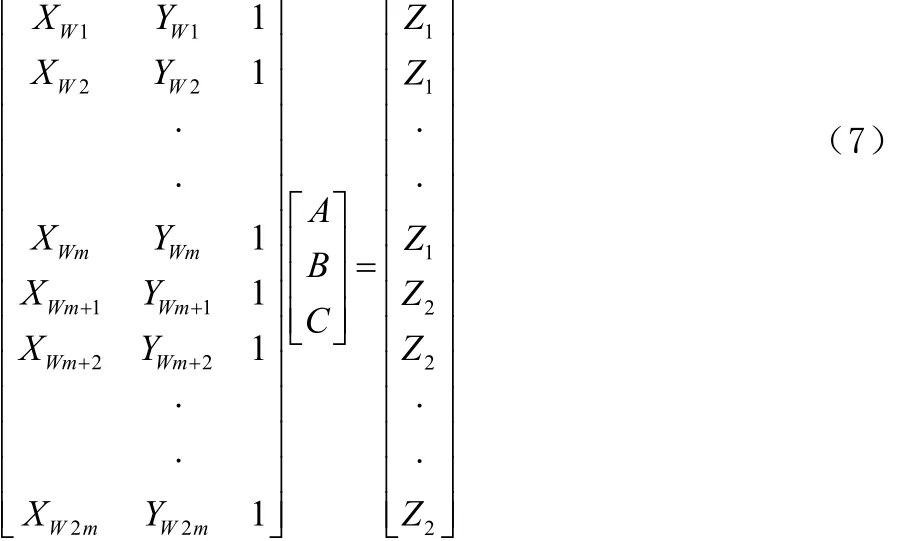
文本用最小二乘法擬合光平面,上述過程可以得到2m個世界坐標點(Xwi,Ywi,Zwi),并由幾何知識可知:兩條平行線可唯一確定一平面,由此可得光平面方程為:

式中,A、B、C為待標定的光平面參數,(Xw,Yw,Zw)為光條上特征點的世界坐標,將上述2m個標定特征點代入式(6)可以構造方程組的矩陣形式為式(7):
可以簡寫為:

最小二乘法解得光平面參數A、B、C的解為:

試驗具體操作實現步驟:前后移動共面模板并且保持結構光平面位置不動,使得共面模板標靶與結構光平面分別相交得到直線光條紋l1、l2,對采集到的光條圖像進行特征加窗提取、濾波、分割、形態學細化等圖像處理運算,從而提取得到光切線上各點的圖像坐標(ui,vi);在Zw坐標軸移動位置的坐標Z1、Z2是已知的,設定Z1=0、Z2=50mm,由圖像處理算法獲得光條上的圖像坐標,結合攝像機試驗標定的參數結果,反解獲得對應的三維坐標值,最后用最小二乘法對獲得的三維坐標點進行平面擬合。
2 結構光平面參數標定試驗
試驗步驟:本文結構光平面標靶試驗采用10×8的棋盤格進行標定,每個小方格的尺寸均為28mm×28mm,當標定靶位于第一個位置時Z1=0mm時構建世界坐標系。已知攝像機標定結果如表1所示。
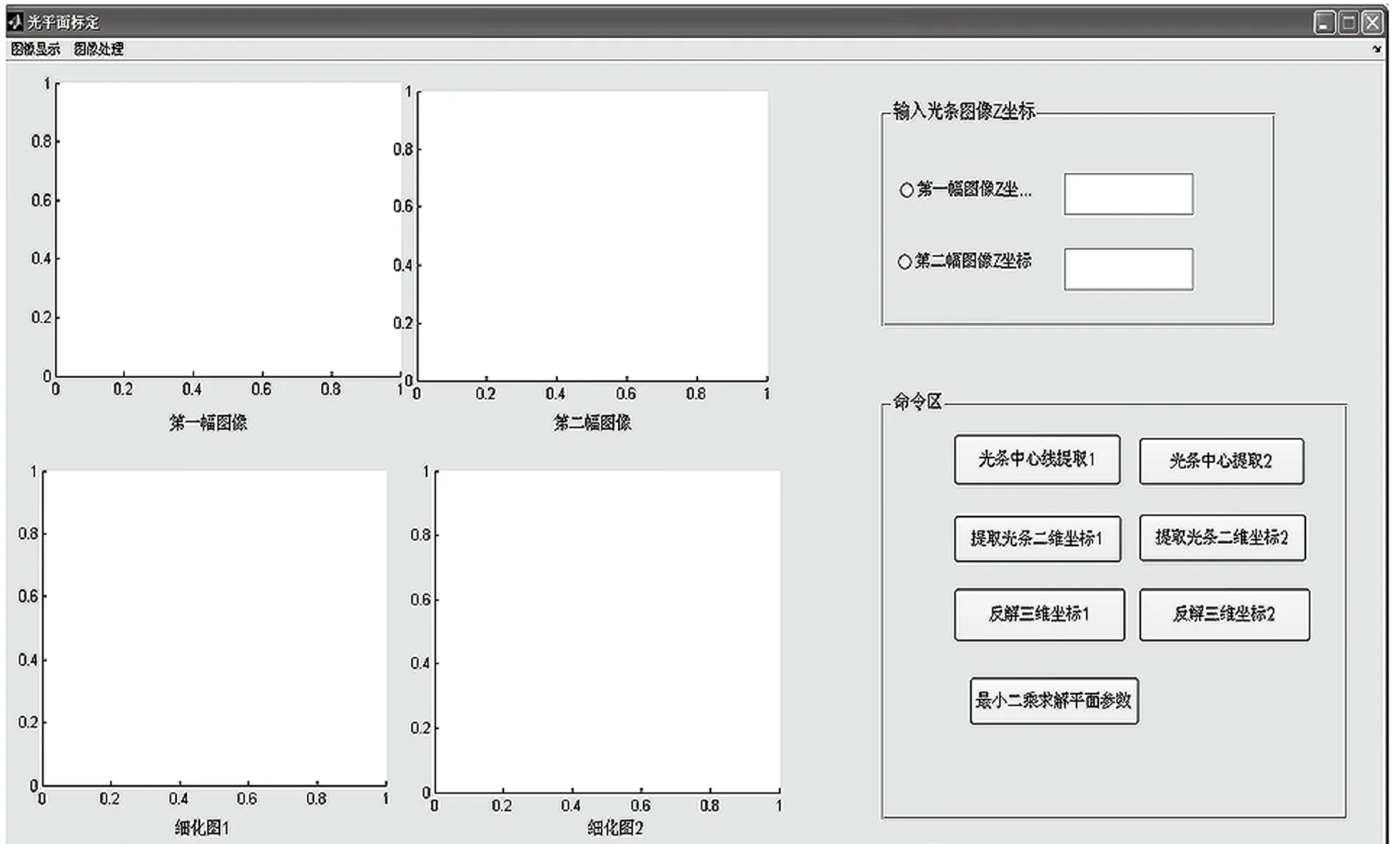
圖2 光平面參數標定界面

表1 攝像機參數標定結果
攝像機標定外參數矩陣由攝像機標定試驗可得:
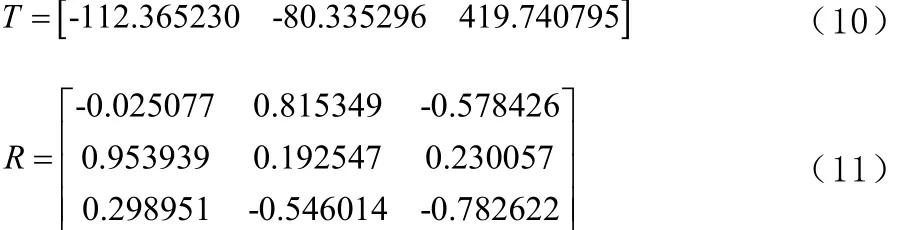
其中,式(10)表示平移矩陣,式(11)表示旋轉矩陣。
根據結構光平面標定流程圖設計基于Matlab GUI的編程,圖2為開發的光平面的標定界面運行后的效果圖。
2.1 讀取特征光條圖像
單擊標定界面的左上角菜單欄中的圖像顯示菜單,圖3中,第一幅圖像對應的標定靶平面位置Z1=0,即標靶平面和世界坐標系XwOwYw重合。在世界坐標系下,第二幅圖像對應的標定靶平面的位置Z2=50mm,標定靶平面的第二個位置是在第一個位置沿著世界坐標系的Zw軸正方向移動50mm得到的。
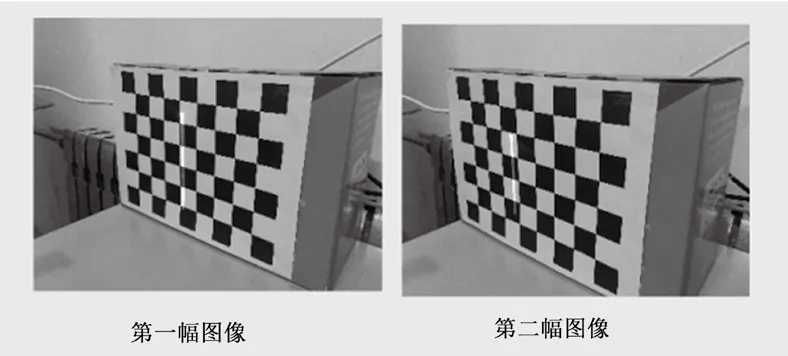
圖3 獲取光條紋圖像
2.2 光條中心線提取
分別單擊標定界面命令區中的光條中心線提取1和光條中心線提取2兩個命令按鈕,對第一幅圖像和第二幅圖像進行光條中心線的提取,如圖4(a)和圖4(b)所示,經局部區域提取的效果分別如圖4(c)和圖4(d)所示。
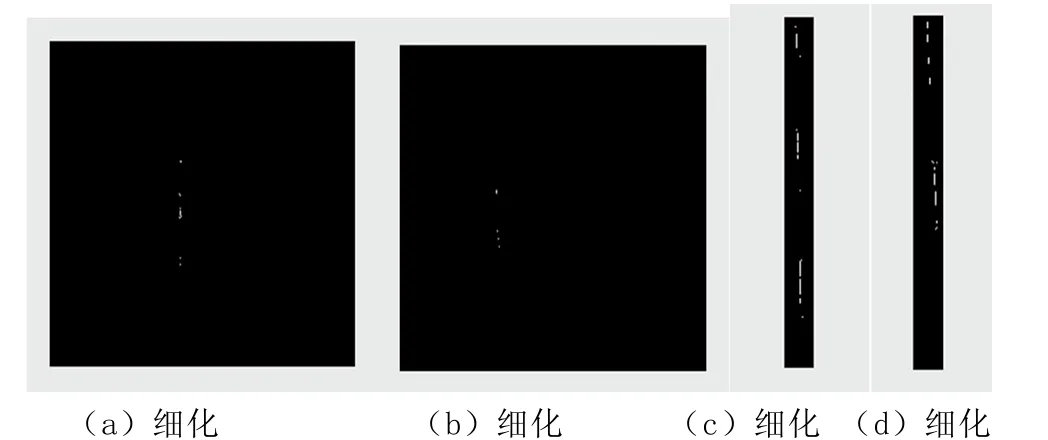
圖4 提取到的光條中心線
2.3 提取光條二維圖像像素坐標
分別單擊提取光條二維坐標1和提取光條二維坐標2命令按鈕,程序運用gainput函數分別選取光條上5個標定特征點,得到的二維圖像坐標如圖5所示。
2.4 反解對應的三維坐標
首先,在運行界面的右上角區域輸入光條圖像分別對應的世界坐標系下的Z坐標值,Z1=0mm,Z2=50mm,然后分別在反解三維坐標1和反解三維坐標2,加入前面攝像機標定的內外參數,得到對應的三維世界坐標值,如圖6所示。
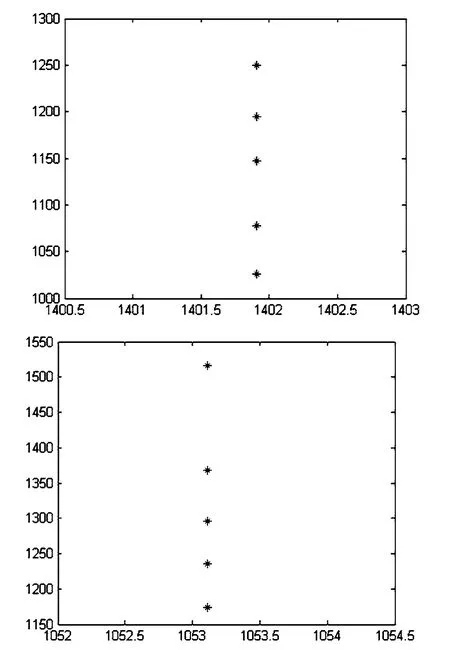
圖5 提取到的光條二維圖像像素坐標圖
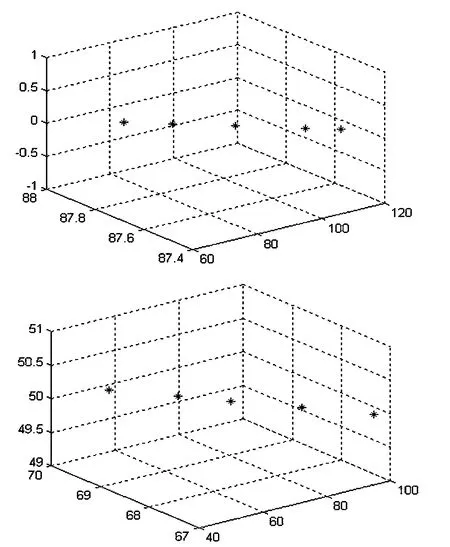
圖6 標定點三維坐標獲取
2.5 擬合求得光平面參數方程
對上述獲得的10個標定特征點的三維坐標用最小二乘法擬合求得光平面參數方程,對光條中心線普通全局提取得到的光平面標定結果如表2所示。

表2 光平面的參數標定結果1
A=-0.0785,B=-2.3801,C=217.1425,把光平面參數代入式(6),于是得到第一組光平面方程為:

對光條中心線進行局部區域提取后得到的標定結果如表3所示。

表3 光平面的參數標定結果2
A=-0.0258,B=-2.6617,C=235.3190,把光平面參數代入式(6),于是得到第二組光平面方程為:

3 基于光平面標定參數的三維測量試驗
3.1 讀取圖像
單擊界面上命令按鈕區中的讀取圖像按鈕,把待測量的模擬焊縫圖像加載到界面上顯示出來。
3.2 光條中心線提取
文中實現的光條中心線的提取方法采用局部特征提取結合形態細化算法,其中,局部特征提取采用imcrop函數實現,得到的加窗圖像尺寸大小為120mm×500mm。
3.3 獲取光條上二維圖像坐標
采用gainput函數提取光條中心線上面包含的二維圖像坐標點云(ui,vi)其中,i表示細化后光條上的第i個點。這里點擊提取光條上11個特征點。三維測量程序采用了局部區域特征提取,使得圖像坐標系由窗口圖像坐標系和原圖像坐標系組成,由上面可知:局部區域圖像的左上角角點在原圖坐標下的位置坐標點為(1310,820),為了實現從局部區域圖像坐標系向原圖像坐標系實現坐標系之間的變換,本文采用式(14)實現兩種坐標系之間的變換:

其中,(u,v)表示原圖像坐標系下的任一點,(uc,vc)表示窗口圖像坐標系下的任一點,(uc0,vc0)表示局部區域圖像的左上角點(即窗口坐標系原點)在原圖像坐標下的像素坐標值,在本試驗中,(uc0,vc0)為(1310,820)。
3.4 求解三維坐標
在三維檢測界面的右上角區域分別輸入前面標定得到的兩組光平面參數,并且將前面標定出來的攝像機參數輸入到該按鈕的回調函數程序中,利用得到圖像像素坐標點(u,v)結合公式(5)、式(6)反解三維坐標值(Xwi,Ywi,Zwi) ,如式(15)所示:
其中,第一組獲得的三維坐標是輸入未加窗處理時得到的光平面參數得到的世界坐標系下的三維坐標,第二組獲得的三維坐標是輸入加窗處理時得到的光平面參數得到的世界坐標系下的三維坐標。
3.5 兩組測量數據對比
測量完成后,整理得到的兩種方法的三維坐標,選取的結構光光細化曲線上11個點檢測結果具體數值如表4所示。
人們以所提取特征點在三維測量坐標中的Z值為波峰坐標,從上述試驗結果可以看出:第一組通過未加窗處理得到的光平面方程參數在三維坐標測量結果中的第六個特征點時,試驗結果中Z值最大,即波峰高度為9.4198mm,按照理論值,第一個特征點和第11個特征點三維測量坐標點的Z值應為0mm,但實際測量值分別為2.4984mm和1.1764mm,因此特征光條未經加窗處理時,試驗測量結果最大誤差2.4984mm。
而第二組通過加窗處理得到的光平面方程參數在三維坐標測量結果中的第六個特征點時,試驗結果中Z值最大,即波峰高度為8.3028mm,按照理論值,第一個特征點和第11個特征點三維測量坐標點的Z值應為0mm,但實際測量值分別為0.9458mm和-0.074mm,特征光條經加窗處理后,試驗測量最大誤差0.9458mm。
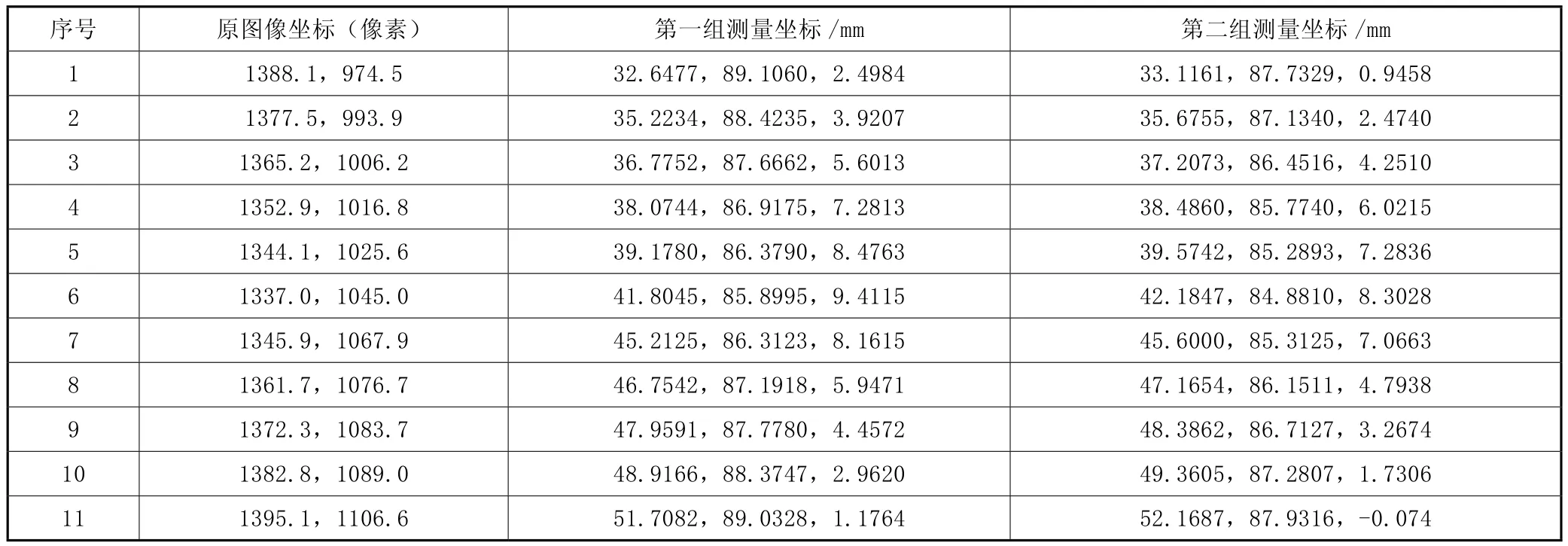
表4 圖像坐標與對應的三維坐標
通過兩組測量結果的誤差對比分析可知:通過加窗處理所提取的光條中心線精度更為準確,因此也降低了光平面參數標定時的誤差,而運用基于定向移動平面標靶的間接標定法測量的精度和速度得到提高。
4 結語
本文首先采用特征加窗以及基于背景校正Otsu的形態細化算提取標靶平面上的光條中心線,大大地提高了結構光中心線提取的精度和提取算法的運算速度,為光平面的標定提供較為準確的數據支持,從而提高了光平面參數標定的準確性。
基于定向移動平面標靶的光平面間接標定法,結合校正后特征點的圖像坐標和標定的攝像機內外參數,反解得到標定特征點對應的三維世界坐標,比常用的直接測量標定點的三維世界坐標獲取的精度高。這種間接標定光平面的方法比拉絲法、靶標法、交比不變性法的精度高,穩定性和適用性好,并且該方法的靶標制作要求低,操作簡單,從而提高了結構光視覺檢測系統的精度和測量速度。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
