轉子自適應主動平衡算法及電磁平衡頭單盤平衡試驗
2018-08-14 09:05:38樊紅衛智靜娟史必佳景敏卿劉恒2張旭輝
西安交通大學學報 2018年8期
樊紅衛, 智靜娟, 史必佳, 景敏卿,4, 劉恒2,,4, 張旭輝
(1.西安科技大學機械工程學院, 710054, 西安; 2.西安交通大學現代設計及轉子軸承系統教育部重點 實驗室, 710049, 西安; 3.西安交通大學機械工程學院, 710049, 西安; 4.西安交通大學機械結構強度與振動國家重點實驗室, 710049, 西安)
現代旋轉機械正向高速化、精密化方向發展,高速化提升了旋轉機械的工作效率,精密化提高了工作質量。對數控機床而言,主軸轉速提高加大了材料去除率,但高轉速也使主軸系統抵抗外界干擾和系統誤差的能力減弱。例如,刀具不均勻磨損及破損、刀具-主軸裝配誤差等一系列導致轉子質量不平衡的問題,均在極高的主軸轉速下被放大,由此導致的巨大離心力對軸系工作質量、可靠性和安全性產生了極大危害,且這一危害的影響是瞬間的[1-2]。因此,需要在不停機狀態下快速檢測并可靠地消除質量不平衡,進而提高旋轉系統的可靠性和安全性。
國內外學者針對旋轉機械的不停機平衡技術已開展了大量研究工作,提出了一系列基于影響系數[3]的在線主動平衡算法。1998年,Dyer等提出了自適應影響系數法,并于2000年對Jeffcott轉子自適應主動平衡進行了深入研究[4]。2001年,Shi研究了變速工況下轉子自適應主動平衡模型[5],提出了魯棒最優影響系數控制[6]。2002年,Zhou等就剛性轉子加速過程中單平面主動平衡最優控制進行了研究,提出了影響系數表法[7]。2003年,Kim等對基于影響系數的增益調度控制進行研究,通過試驗驗證了其穩定性[8]。
除平衡方法的研究外,同行學者也開發了主動平衡裝置,如機械式[9]、噴液式[10-11]、磁流變式[12]和電磁式[13]平衡頭。其中,電磁式平衡頭具有非接觸、響應快、無污染等優勢,受到同行學者的廣泛關注。因此,將自適應影響系數法和電磁平衡頭聯合用于轉子在線主動平衡是當前轉子動平衡領域的熱點話題。然而,目前國內自適應平衡算法及電磁平衡研究主要面向化工機械等非精密轉子[14-16],而國外在精密轉子自適應電磁平衡研究中尚未對單盤轉動平衡策略進行深入研究。
本文自主開發了一種電磁圓環形主動平衡頭,從經典影響系數法入手,構造了一種自適應平衡算法,以砂輪-電主軸為對象進行主動平衡試驗驗證。本研究以單平面自適應平衡算法和電磁平衡頭單盤轉動平衡策略為主線,是對本領域已有研究的發展,對機床主軸、風機、直升機等裝備的在線主動平衡具有重要參考價值。
1 轉子平衡影響系數法
1.1 轉子平衡影響系數的定義
影響系數法是利用不平衡矢量與轉子振動之間的線性關系而使轉子系統達到平衡狀態的方法,其中影響系數是指單位不平衡矢量所產生的振動。獲得轉子系統影響系數的方式有兩種:一是通過轉子動力學計算得到理論的影響系數,二是通過現場試驗和振動測試得到實際的影響系數。對于在線主動平衡,影響系數只能通過在線測試方式獲得。
設轉子以角速度ω運行,當具有不平衡量ui時,測得振動為vi,改變不平衡量為ui+1,得到振動為vi+1,則轉子系統的影響系數為
更普遍地,在角速度ω下定義cij(ω)為在第i個平面測量在第j個平面上不平衡的影響系數,uj(ω)為第j個平面上的不平衡量,di(ω)為在第i個平面測量時由干擾引入的振動,vi(ω)為在第i個平面測得的振動,則
將式(2)改寫為矩陣形式,有
V=CU+D
(3)
式中:C為影響系數矩陣;U為不平衡矢量;D為干擾矢量;V為振動矢量。其中,第j個平面上的不平衡在第i個測量平面引起的振動影響系數定義為
1.2 基于影響系數法的轉子平衡原理
當轉子達到穩定轉速后,第k次平衡迭代時振動可由如下方程得到
Vk=CUk+D
(5)
對測量平面數目等于平衡平面數目的情況,影響系數矩陣為非奇異方陣。此時,第k+1次迭代能夠實現平衡目標,即轉頻振動趨近于0,此時平衡方程為
Vk+1=CUk+1+D≈0
(6)
根據式(6)可知,當轉子系統處于平衡狀態時,有如下關系
CUk+1=-D
(7)
進一步,得到平衡校正矢量公式
Uk+1=-C-1D
(8)
對于在線主動平衡,每次迭代時平衡校正矢量不為0且干擾無法直接測得。為計算所需的平衡校正矢量,假設干擾是恒定的,通過下式得到
D=Vk-CUk
(9)
將式(9)代入式(6),可得
CUk+1=CUk-Vk
(10)
進而得到平衡校正矢量為
Uk+1=Uk-C-1Vk
(11)
針對影響系數矩陣為方陣的情況,影響系數矩陣可認為在控制過程中是不變的,此時影響系數矩陣求逆可先于平衡過程進行,如此以來在實際在線平衡的每一步迭代過程中僅需執行一次矩陣乘法。平衡時,需用試驗估計所得到的影響系數矩陣Cnew替代式(11)中的C。如此處理得到的平衡控制律的穩定性完全取決于影響系數的估計精度。
2 單平面自適應影響系數法平衡理論
2.1 非自適應單平面平衡控制律
在穩定工作轉速下,第k次迭代時轉子系統同步振動可表示為平衡輸入和轉子同步干擾累積效應的線性函數,如下
vk=cuk+d
(12)
式中:uk為第k次迭代平衡校正量;d為傳感器所測振動信號中的干擾量。
進一步,可得平衡校正量計算公式
式中:uk和vk由測量得到,影響系數c由試驗得到。單平面主動平衡的目標是求取合適的uk+1使第k+1次迭代的振動輸出為0。
2.2 引入增益因子
針對式(13),引入增益因子α,可得
假設干擾用假想不平衡量uim采用某累積影響系數cu表示如下
d=ccuuim
(15)
進而,推導可以得到
vk=c(uk+cuuim)
(16)
在此,定義累積作用項tk為
tk=uk+cuuim
(17)
將式(17)代入式(16),可得
vk=ctk
(18)
假設干擾不平衡量uim、影響系數c和cu在一次迭代過程中不變,可用式(18)、式(17)和式(13)得到第k次和第k+1次迭代之間的關系
聯合式(19)和式(18),可得振動歷程關系
當且僅當滿足如下關系時
針對固定影響系數c,單平面主動平衡控制律式(20)才是穩定的。該穩定準則在復平面內如圖1所示[17]。
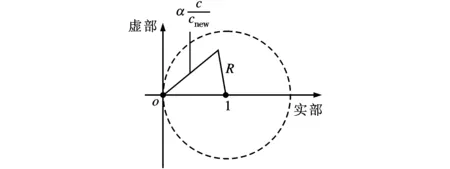
圖1 單平面平衡穩定域
由圖1可知,落入右半復平面單位圓內所有αc/cnew取值均可以保證單平面平衡是穩定的。進一步,假設影響系數在控制過程中不變,當且僅當增益因子滿足下式時,非自適應控制律式(14)總是穩定的
式中:|c|、|cnew|為實際和估計影響系數幅值;θc、θcnew為影響系數相位角。因增益因子α大于0(0<α<1),故當估計影響系數相位角和實際影響系數相位角之差為±90°時(如c/cnew實部大于0),總能找到一個使控制過程穩定的增益因子α。
基于以上推導,從初始振動到振動趨近于0的整個過程都受控于式(20);小的增益因子有利于提高控制穩定性,但會降低收斂速度且會增加對影響系數估計準確性的要求。因此,合理的影響系數在線估計策略對在線主動平衡極其重要。
2.3 引入遺忘因子
假設將第k-1次平衡迭代結果作為第k次平衡補償初始狀態vk-1,來自平衡控制器的控制信號將驅動平衡裝置工作,此時轉子振動更新為vk,則新的影響系數為
對式(23),平衡試重時過于劇烈的調整會降低影響系數估計精度,而過小的調整又會導致分母接近0使影響系數出現奇異值,需合理選擇主動平衡裝置的調整幅度。
此外,旋轉機械工作時干擾不可避免,此時僅靠式(23)獲取影響系數會產生一定誤差。為減小當次測量誤差對影響系數估計結果的影響,需在影響系數估計中考慮先前結果,采用“加權法”更新影響系數如下
式中:β為遺忘因子,取值范圍為0≤β≤1。
當β=0時,當次估算影響系數對平衡迭代沒有貢獻,即使用上次估計值作為本次迭代值,此種情況和非自適應影響系數法相同;當β=1時,只將當次估計值用于計算而忽略之前結果,會造成控制過程不穩定。合適的遺忘因子取值需綜合考慮測量誤差敏感性和收斂速度兩方面因素,當β取值趨于0時,抵抗外界干擾的能力較強,適用于強噪聲或動態特性穩定的系統;取β值趨于1時,收斂速度較快,適用于強非線性或動態特性變化較大的系統。
2.4 單平面在線自適應平衡控制律
在引入增益因子和遺忘因子的基礎上,單平面在線自適應平衡控制律如下

3 砂輪-電主軸單平面主動平衡試驗
3.1 含永磁體的電磁圓環形主動平衡頭
含永磁體的電磁圓環形主動平衡頭結構原理如圖2所示。
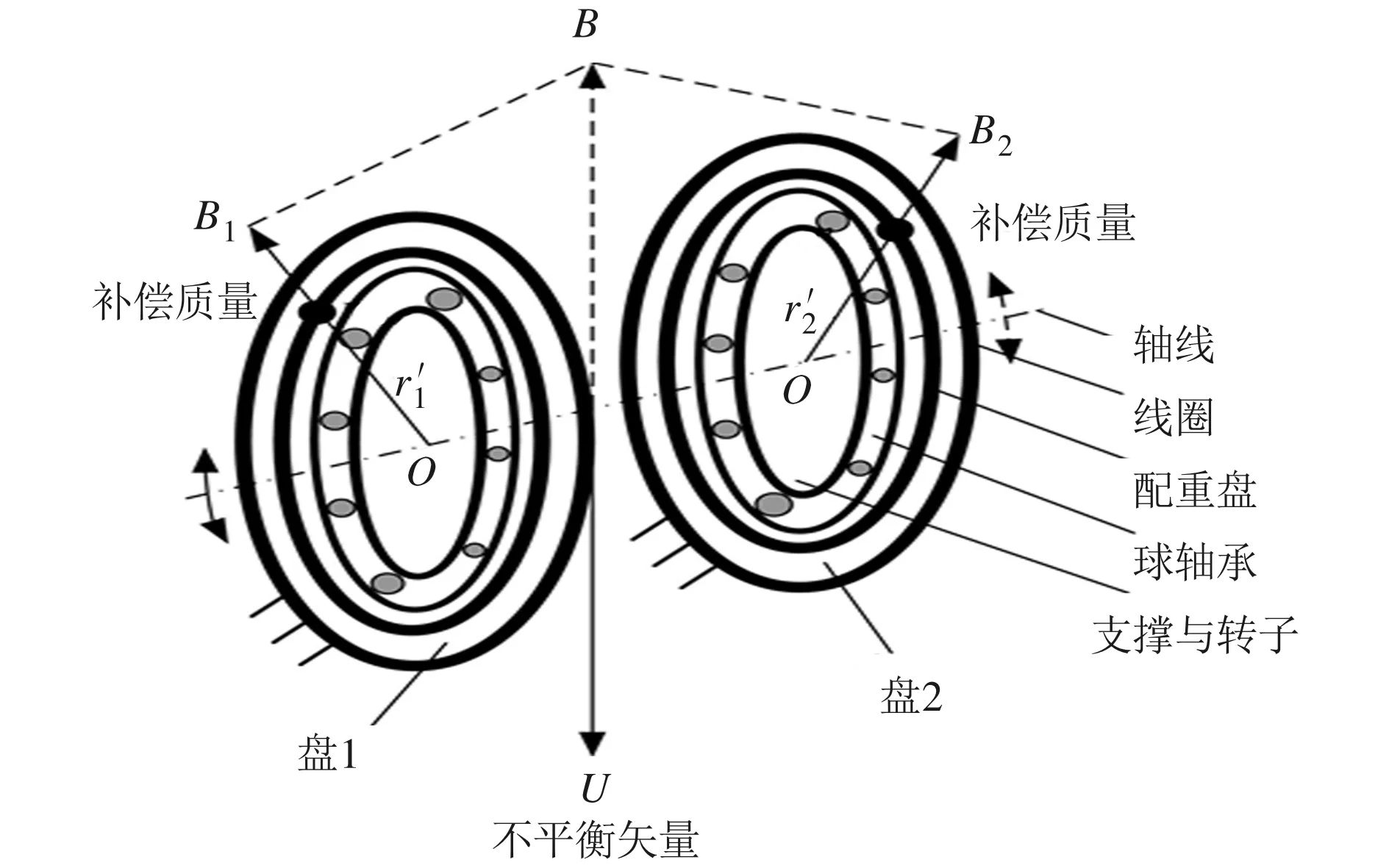
圖2 電磁圓環形主動平衡頭結構原理
如圖2所示,平衡頭總體包含兩組線圈和兩組配重運動機構。線圈整體呈圓環狀、與主軸殼體固定連接,線圈通電產生電磁場驅動配重機構轉動。配重機構整體亦呈圓盤狀、由小阻尼的球軸承支撐,在線圈電磁場作用下可雙向轉動。配重圓盤攜帶補償質量和定位用的永磁體(永磁體在圖2中未畫出)。當配重盤轉至平衡位置時線圈斷電,依靠永磁體和兩側磁路組件之間的磁阻最小原理實現配重盤鎖死,從而保持住當前的平衡狀態。平衡頭自鎖和通電啟動原理如圖3所示。
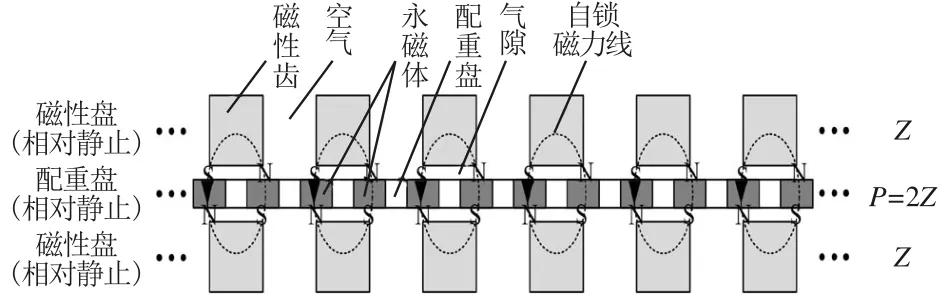
(a)穩定自鎖位置磁路周向展開圖(線圈不通電)
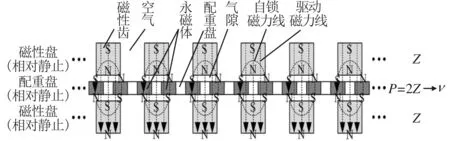
(b)配重盤啟動時刻磁路周向展開圖(線圈通電)Z為磁性齒齒數;P為永磁體個數;S代表永磁體和電磁場的南極、N代表北極圖3 電磁圓環形主動平衡頭自鎖與啟動原理
圖3a為配重盤穩定自鎖位置的磁路,圖3b為配重盤啟動位置的磁路,圖中給出了永磁體及其兩側磁路組件即磁性齒的位置關系。永磁體設計為圓柱體形狀,共P/2=Z=10對,沿配重盤周向等間隔均勻分布,相鄰兩個永磁體極性反向布置,所有永磁體嵌于配重盤預留孔內,且永磁體充磁方向軸線與配重盤轉動軸線平行。線圈不通電時,相鄰一對永磁體之間形成磁閉合回路,如圖3a所示。位于配重盤兩側的磁路組件為磁性盤,是一帶有10個齒的導磁金屬圓盤,齒形近似矩形,中部齒厚等于相鄰兩永磁體軸線間距,齒高齒寬及齒與配重盤間氣隙依照磁場和磁力而定。線圈通電時,該齒盤被磁化形成有效磁極,該磁極和永磁體間相互作用形成驅動力,推動配重盤轉動,如圖3b所示。沿同一方向連續轉動時,需向平衡頭線圈施加極性交變的方波驅動電壓。
3.2 電磁平衡頭單盤轉動的平衡試重策略
圖4為電磁平衡頭的試重方案示意圖。假定轉子角速度為ω時初始不平衡引起的慣性離心力為Fin,由“大小相同、相位不同”的平衡頭試重引起的離心力分別為F1、F2、F3,它們和Fin的合力依次為F∑1、F∑2、F∑3。圖4中,F∑2與Fin大小相等、位于同一圓周上,此時試重力和初始不平衡力之間角度為θ2;F∑1位于F∑2內側,F∑1
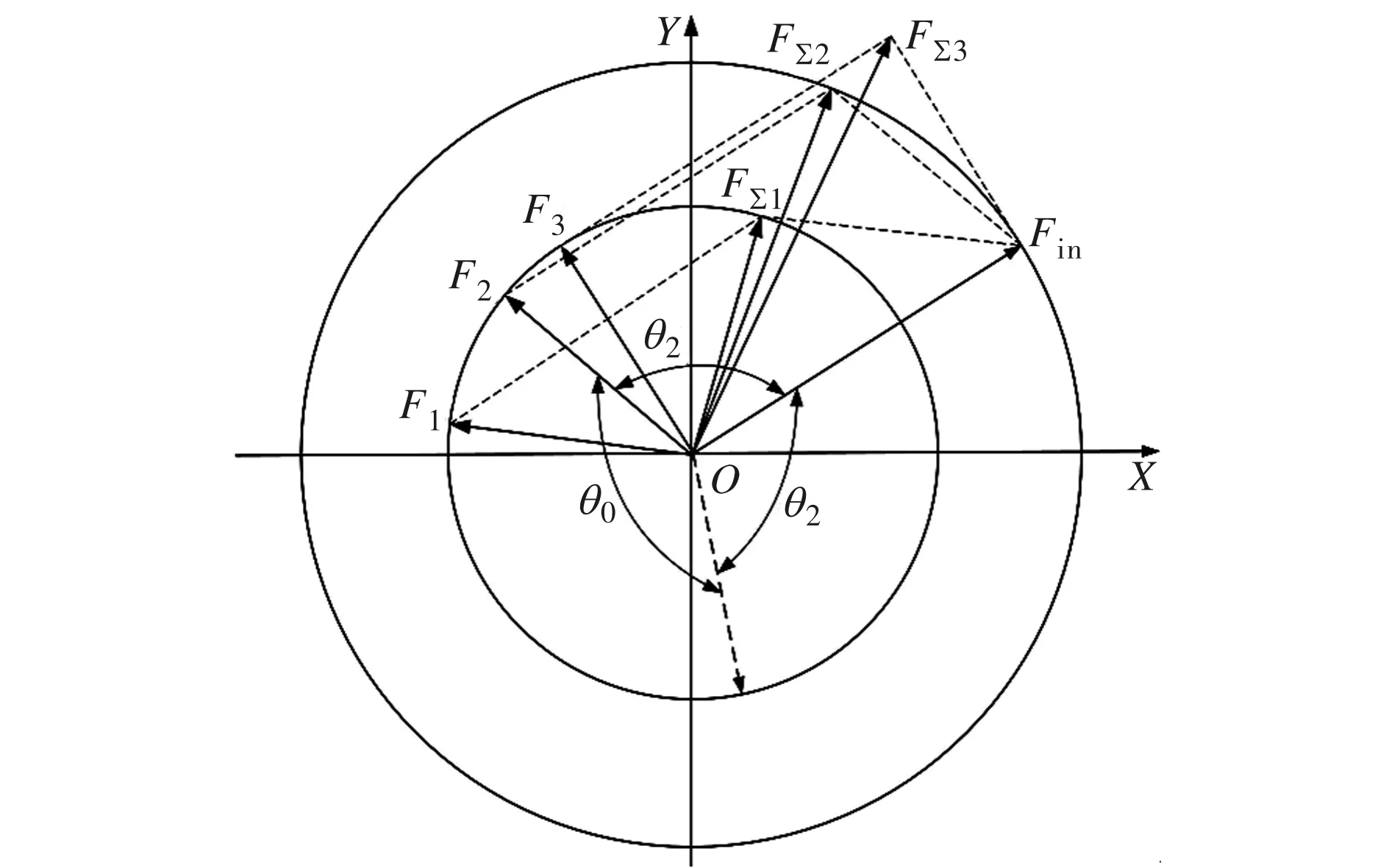
圖4 試重方案示意圖
由于所設計的電磁圓環形主動平衡頭補償量是離散、有限的,平衡時不能將不平衡量完全抵消,因此需對控制算法計算得到的平衡補償量進行校正,使實際值最大程度接近計算值。單配重盤轉動時,配重盤解算相對簡單,故本文采用單盤轉動平衡策略。設控制算法所得配重量的幅值為|u|、相位為θu,配重盤初始位置相對鍵相點的角度為θA和θB,單配重盤轉動時平衡頭校正方案如圖5所示。
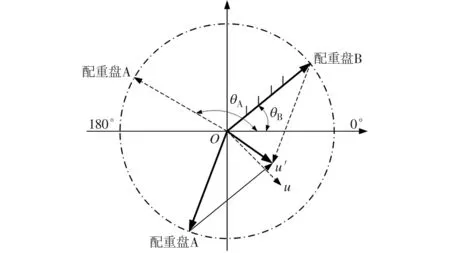
圖5 單盤轉動補償矢量校正及配重盤定位示意圖

式中:“/”表示取商;“%”表示取余數。
校正后的平衡補償量幅值|u|可通過計算A、B兩盤之間的夾角得到。
3.3 砂輪電主軸單平面自適應平衡試驗
砂輪-電主軸單元是典型的單平面平衡轉子系統,工作過程中,實際不平衡主要表現在砂輪端,其單平面自適應電磁平衡系統如圖6所示。
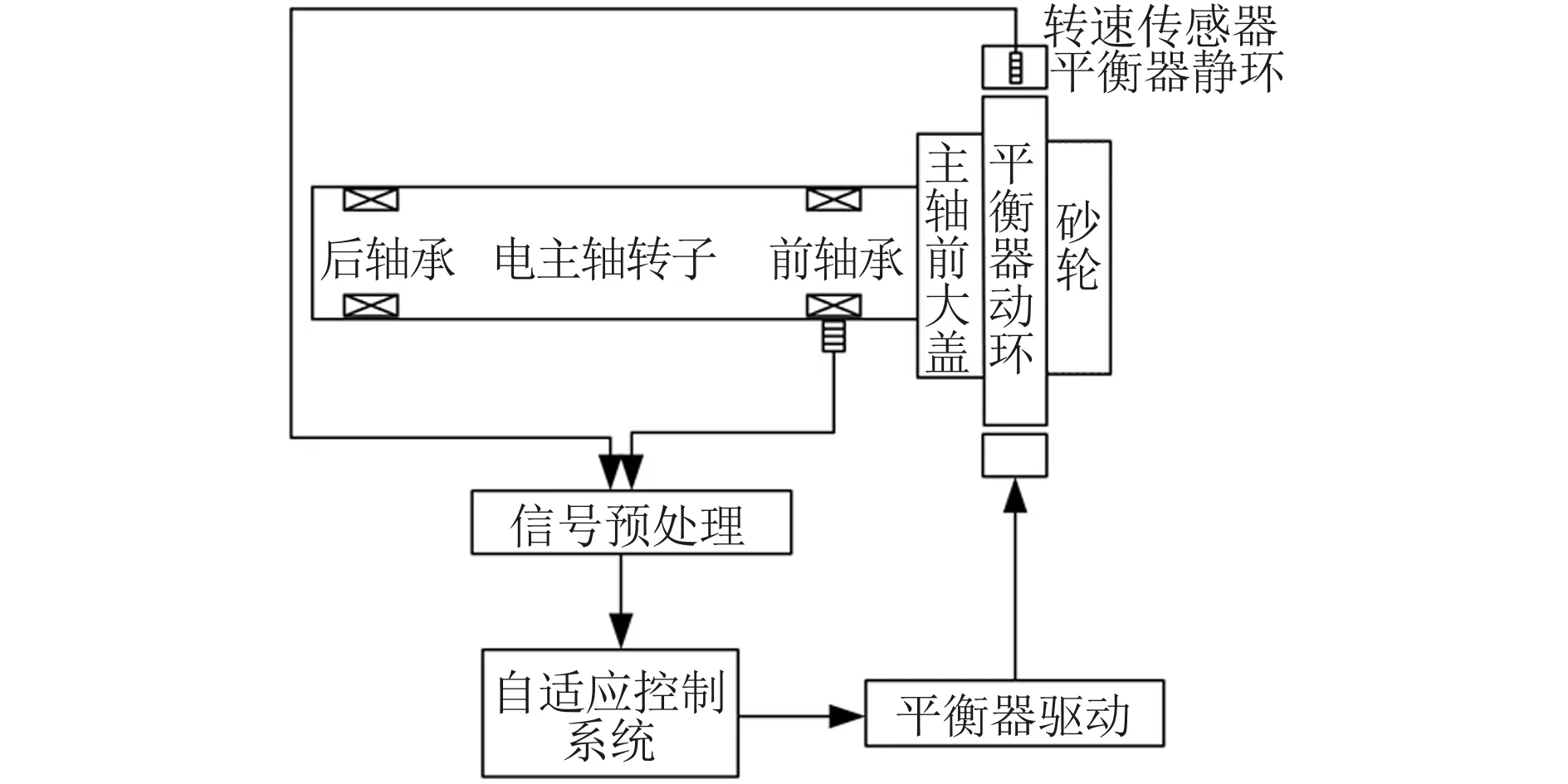
圖6 砂輪-電主軸單平面自適應電磁平衡系統
根據振動理論可知,不平衡力作為強迫激勵作用于電主軸系統后引發振動,在豎直方向上的振動微分方程可表示為
式中:M為轉子質量;C為阻尼;K為剛度;x為豎直方向振動位移。由式(28)可知,不平衡量U和轉速ω是不平衡振動的主要影響因素。因此,以下針對不平衡量和轉速變化開展電主軸在線主動平衡試驗。
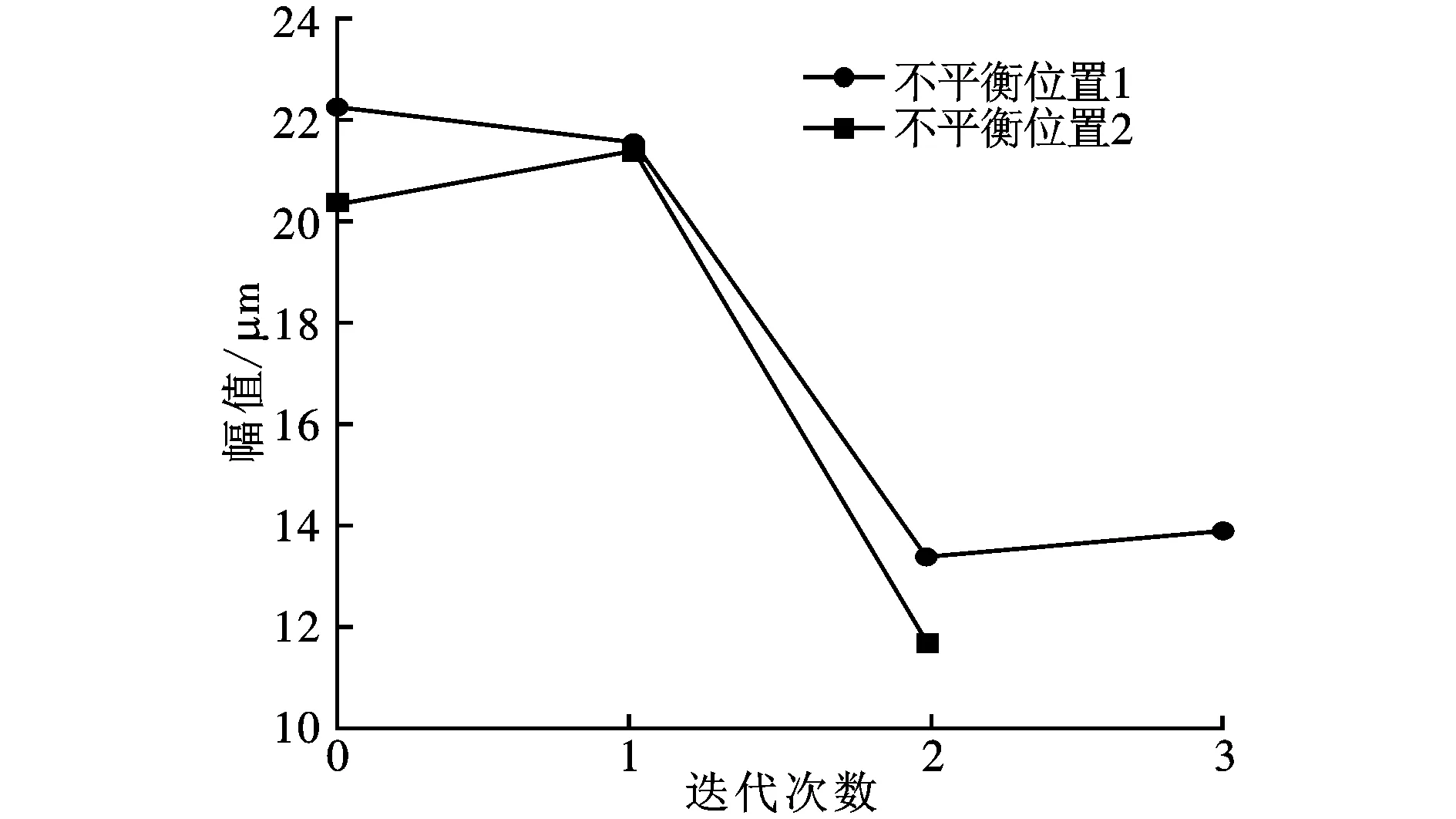
3.3.1 施加不同的外部不平衡量 在模擬砂輪盤的180°和285°位置各添加24.59 g·cm的不平衡量,設電主軸以3 000 r·min-1正轉,初始影響系數為0.2+i0.1,遺忘因子為0.8,增益因子為0.5,平衡前配重盤補償量為0 g·cm∠171°。
(a)基頻振動幅值變化
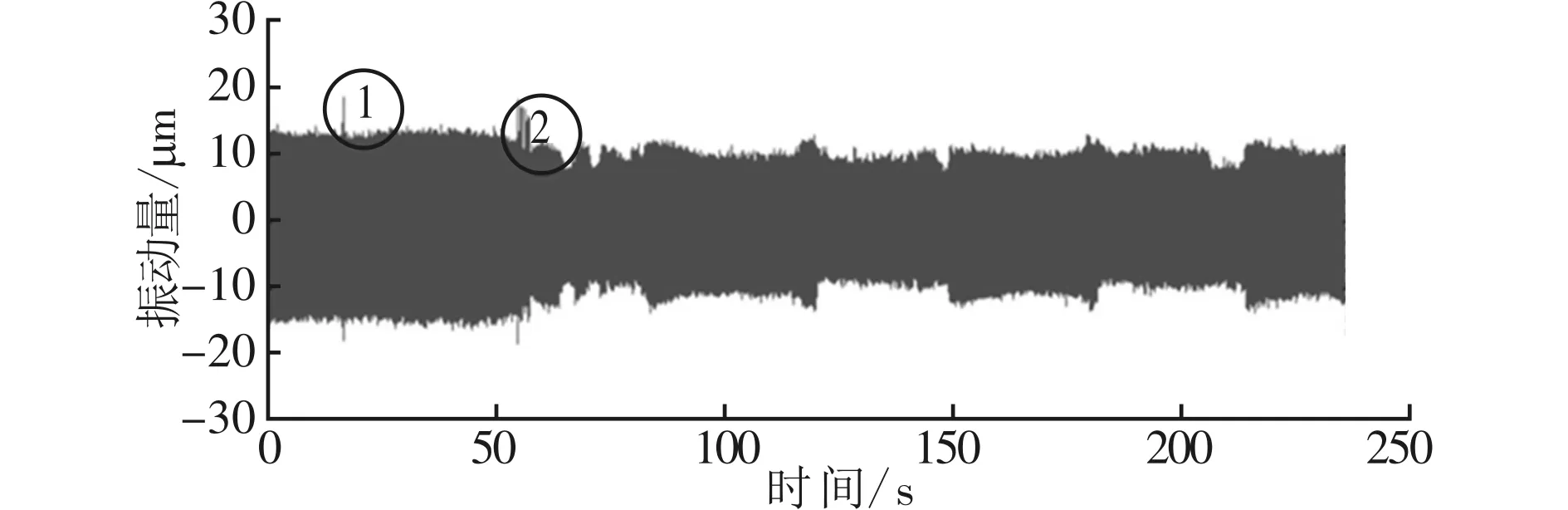
(b)不平衡位置1振動信號時域波形
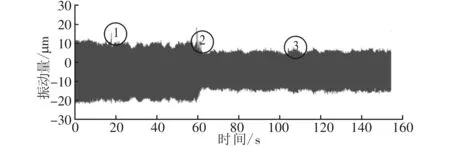
(c)不平衡位置2振動信號時域波形
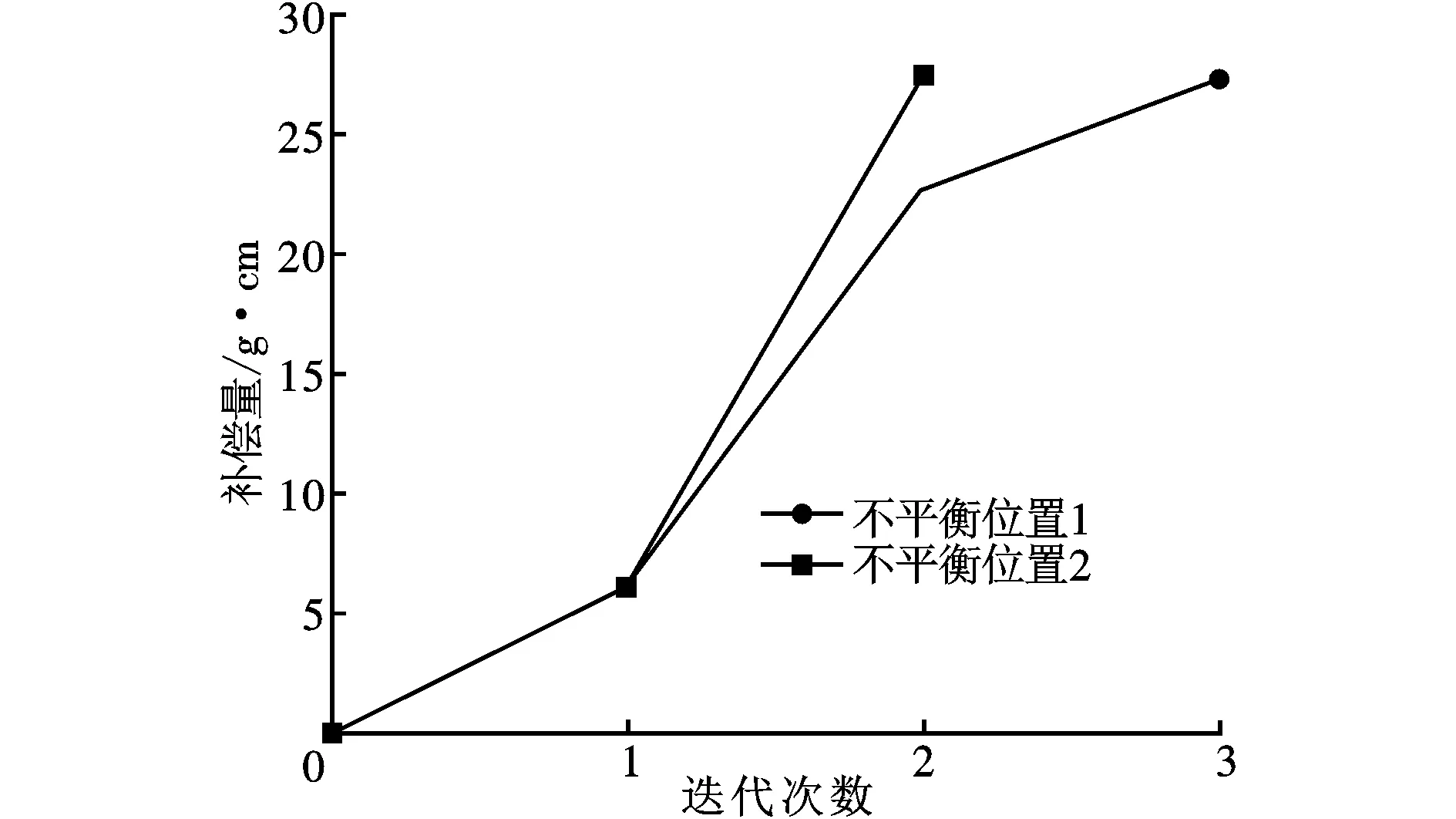
(d)平衡補償量
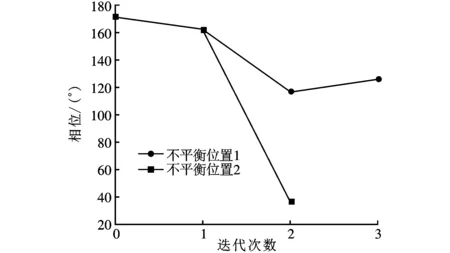
(e)平衡補償量相位圖7 不同外加不平衡量下主動平衡過程中振動變化和補償量變化
通過試驗,得到平衡過程中主軸基頻振幅變化、時域波形變化及平衡量變化如圖7所示。當不平衡量為24.59 g·cm∠180°時,經2次迭代,主軸基頻振動位移峰-峰值由20.35 μm降至11.67 μm,降低率為42.65%,配重量變為27.26 g·cm∠36°。當不平衡量為24.59 g·cm∠285°時,經3次迭代, 主軸振動幅值由22.35 μm降至13.89 μm,降低率為37.8%,配重量變為27.26 g·cm∠126°。
3.3.2 電主軸具有不同的轉速 設初始影響系數為0.2+i0.1,遺忘因子為0.8,增益因子為0.5,初始外加不平衡為16.06 g·cm∠60°,電主軸的工作轉速分別為2 400 r·min-1和3 000 r·min-1。
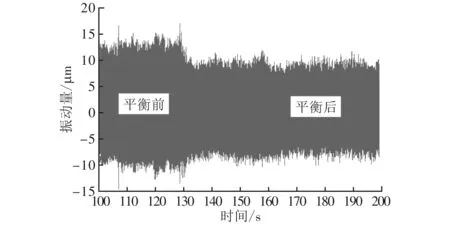
(a)2 400 r·min-1時域波形
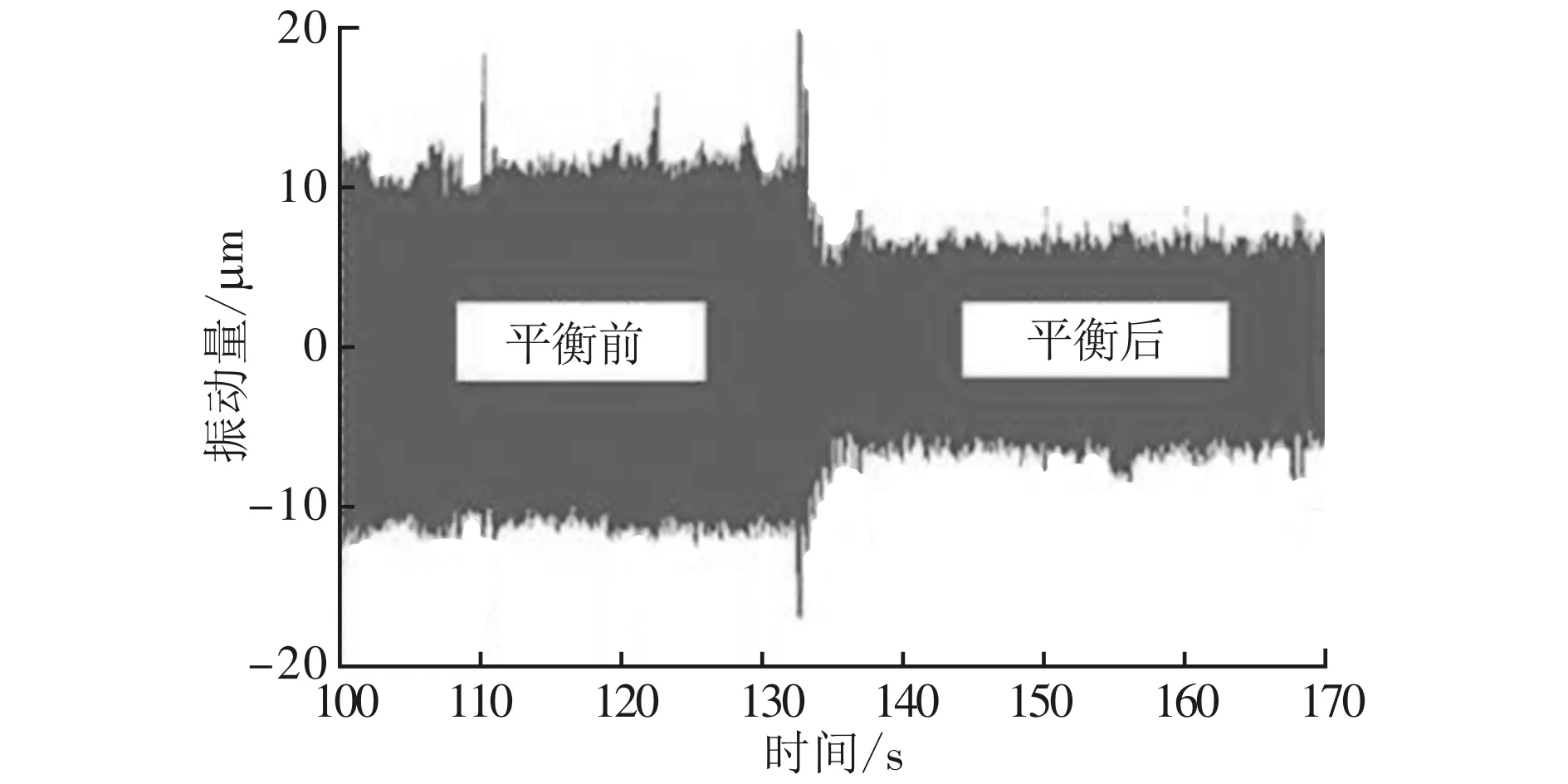
(b)3 000 r·min-1時域波形
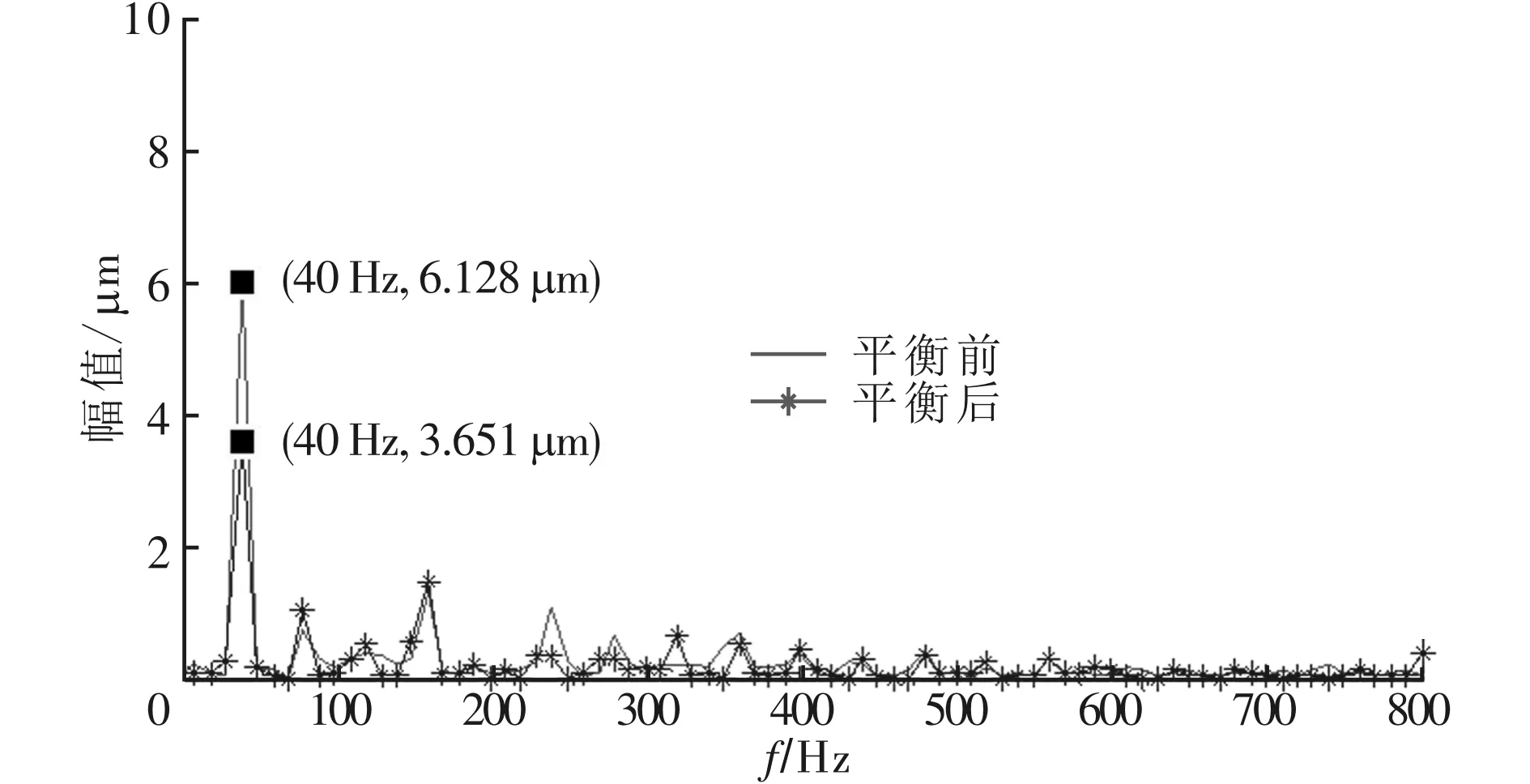
(c)2 400 r·min-1頻譜分析圖
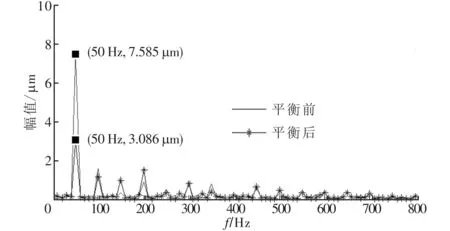
(d)3 000 r·min-1頻譜分析圖圖8 兩種轉速下平衡效果對比試驗結果
經過試驗,得到平衡過程中時域波形變化和頻譜變化如圖8所示。根據圖8可知,兩種轉速下單平面自適應主動平衡方法均得到了良好的平衡結果,轉速為2 400 r·min-1時,主軸基頻振幅降低40%,轉速為3 000 r·min-1時,降低60%,表明轉速越高平衡效果越好。原因在于,轉速高時振動對不平衡更加敏感,試重估計所得到的影響系數更加準確,平衡過程更加順暢。
4 結 論
(1)從轉子動平衡的影響系數定義入手,給出了影響系數法的轉子平衡方程。在此基礎上,通過引入增益因子和遺忘因子,構建了轉子單平面在線自適應平衡方程,探討了其收斂性和穩定性問題。
(2)設計了一種含永磁體的電磁圓環形主動平衡頭,分析了作動原理;提出一種單配重盤轉動的平衡策略,確定了在線平衡具體試重方案,并對方案合理性進行了分析。
(3)開發了砂輪-電主軸在線自適應電磁平衡系統,開展了不同不平衡量和不同轉速下轉子主動平衡試驗,獲得了平衡過程的時域波形、振幅下降率、平衡步數和平衡盤最終位置等數據。本文兩種不同的初始不平衡量和轉速下自適應電磁平衡方法均使電主軸振動下降了40%左右,表明電磁平衡頭單盤轉動聯合單平面自適應平衡算法可以有效控制機床主軸類轉子的不平衡。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
