函數(shù)型變論域模糊PID自整定交流伺服系統(tǒng)研究
2018-08-07 06:27:56袁滄虎馬立新
電力科學(xué)與工程 2018年7期
袁滄虎, 馬立新, 周 陽(yáng)
(上海理工大學(xué) 光電信息與計(jì)算機(jī)工程學(xué)院 上海 200093)
0 引言
近年來(lái),隨著人們物質(zhì)生活水平不斷提高,對(duì)低碳發(fā)展和綠色經(jīng)濟(jì)的要求越來(lái)越高[1]。 而永磁同步電機(jī)(Permanent Magnet Synchronous Motor, PMSM)由于具有高轉(zhuǎn)矩慣性比、高效率及高功率密度,在工業(yè)領(lǐng)域應(yīng)用廣闊,在軌道交通、電動(dòng)汽車、國(guó)防事業(yè)、精密機(jī)床等諸多領(lǐng)域獲得了普遍的應(yīng)用。
以往實(shí)際工程中都是采用經(jīng)典PID對(duì)PMSM進(jìn)行控制。經(jīng)典PID控制一般在線性控制系統(tǒng)中能夠取得良好的性能,而對(duì)于類似PMSM的非線性控制系統(tǒng)或時(shí)變系統(tǒng)[2],使用常規(guī)PID技術(shù)難以滿足系統(tǒng)的動(dòng)靜態(tài)特性。經(jīng)典PID技術(shù)和模糊理論融合無(wú)疑是改進(jìn)系統(tǒng)動(dòng)靜態(tài)性能的有效途徑,而常用的Fuzzy-PID控制系統(tǒng)在運(yùn)行過(guò)程中,誤差和誤差趨勢(shì)會(huì)逐漸減小,如果依舊使用初始論域完成推理,控制精度會(huì)有所降低。本文提出了一種變論域Fuzzy-PID自整定矢量技術(shù),該技術(shù)將函數(shù)型變論域伸縮因子[3]與普通Fuzzy-PID結(jié)合,使初始論域能夠隨誤差改變而在線伸縮調(diào)整,從而大大提高了推理規(guī)則的利用率,使系統(tǒng)的運(yùn)行特性更加穩(wěn)定。
1 永磁同步電機(jī)的數(shù)學(xué)模型
永磁伺服電機(jī)的高精度性能是由先進(jìn)的理論及策略來(lái)保證的。目前成熟的高精度控制策略是矢量控制,而精確的數(shù)學(xué)模型是發(fā)揮矢量控制優(yōu)勢(shì)的前提。
在對(duì)PMSM相關(guān)參數(shù)作常規(guī)假設(shè)后,本文以常見(jiàn)的面貼式PMSM為例[4],分析并建立了常用的3種坐標(biāo)下的PMSM矢量圖,如圖1所示。

圖1 面貼式永磁同步電機(jī)結(jié)構(gòu)矢量圖
本文選擇在d-q坐標(biāo)系下電機(jī)矢量圖為例,得到如下面貼式PMSM數(shù)學(xué)方程。
電壓方程:
(1)
磁鏈方程:
(2)
d-q坐標(biāo)下的轉(zhuǎn)矩方程為:
ψfiq
(3)
式中:Uq、Ud分別為交直軸電壓;iq、id為交直軸電流;Lq、Ld為交直軸電感;ψq、ψd為交直軸磁通;ωr為轉(zhuǎn)子角速度;ψf為轉(zhuǎn)子磁鏈;Rs為定子電阻[4]。
2 模糊PID自整定控制系統(tǒng)
2.1 模糊控制
現(xiàn)代模糊理論是一種基于集合論、語(yǔ)言變量和邏輯推理的模糊數(shù)學(xué)智能控制方法,其汲取工程師和學(xué)者們的工程實(shí)驗(yàn)結(jié)論,形成推理法則,并提取傳感器時(shí)變輸出量并進(jìn)行量化處理,將量化后的數(shù)據(jù)傳入模糊控制器的接入端口,進(jìn)行規(guī)則推理[5],最后將相應(yīng)的接出端變量施加給受控對(duì)象[6]。
被控系統(tǒng)的精度或特性往往與模糊環(huán)節(jié)的接入量個(gè)數(shù)相關(guān)。接入越多的變量,控制效果越好;但過(guò)多的接入量也會(huì)增加系統(tǒng)的復(fù)雜性,使系統(tǒng)響應(yīng)時(shí)間變長(zhǎng),同時(shí)對(duì)軟硬件要求也更高。本文考慮PMSM系統(tǒng)精度時(shí),也考慮到相關(guān)軟硬件的投入,選擇將接入變量為二維,接出端變量為三維。
2.2 模糊PID自整定控制
PMSM本身是復(fù)雜的瞬態(tài)非線性系統(tǒng),常常拖動(dòng)轉(zhuǎn)矩不確定的負(fù)載進(jìn)行生產(chǎn),這些都使常規(guī)的PID技術(shù)較難達(dá)到先進(jìn)工業(yè)所要求的高精密控制特性要求。自適應(yīng)控制理論和智能方法相融合是解決上述這一問(wèn)題的有效途徑,其不僅具有經(jīng)典PID簡(jiǎn)單、精確的特點(diǎn),并能利用智能方法實(shí)現(xiàn)PID的實(shí)時(shí)校正。
普通Fuzzy-PID系統(tǒng)對(duì)兩個(gè)內(nèi)環(huán)采用常規(guī)PID控制,而外環(huán)(速度環(huán))則設(shè)計(jì)為Fuzzy-PID 3參數(shù)實(shí)時(shí)調(diào)整控制器[7]。該控制器主要以光電編碼盤提供的電機(jī)轉(zhuǎn)速經(jīng)過(guò)比較作差得到轉(zhuǎn)動(dòng)e,由e得到轉(zhuǎn)動(dòng)誤差變化率ec;兩者接入輸入端口,經(jīng)模糊推理后以增益Δkp、Δki、Δkd作為模糊環(huán)節(jié)的輸出量,并對(duì)其進(jìn)行一定運(yùn)算后,將獲得的新的kp、ki、kd作為Fuzzy-PID自整定系統(tǒng)的輸出。
先將論域進(jìn)行歸一化處理,設(shè)為[-1,+1],由系統(tǒng)實(shí)際范圍[emin,emax]、[ecmin,ecmax]、[Δkmin(m),Δkmax(m)](m=p、i、d)推導(dǎo)出對(duì)應(yīng)的量化因子Ke、Kec和比例因子LK(m)。
(4)
經(jīng)上述公式變換后的實(shí)際論域?yàn)椋?/p>
(5)
根據(jù)Mamdani的min-max推理法則,語(yǔ)句為:If A and B then C。選擇隸屬度函數(shù)為對(duì)稱的三角形函數(shù),并采用重心法對(duì)其進(jìn)行解模糊。由誤差逐漸減小的規(guī)律,再結(jié)合學(xué)者專家研究結(jié)論,得到Δkp、Δki、Δkd控制規(guī)則如表1所示[8]。
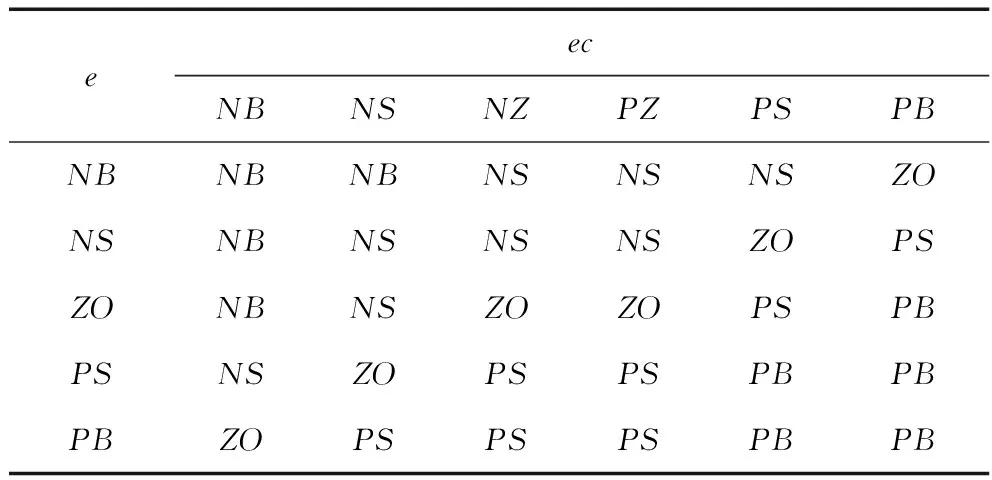
表1 ΔKp模糊推理規(guī)則表
表中:NB、NS、NZ、ZO、PZ、PS、PB為e、ec的變化趨勢(shì),分別表示負(fù)大、負(fù)小、負(fù)零、零、正零、正小、正大。
3 變論域Fuzzy-PID自整定
3.1 變論域伸縮因子參數(shù)分析
變論域思想是通過(guò)一定準(zhǔn)則使得初始論域跟著對(duì)應(yīng)變量的改變而實(shí)時(shí)調(diào)整,而伸縮因子就是控制這種改變的準(zhǔn)則。其結(jié)構(gòu)框圖如圖2所示。

圖2 變論域Fuzzy-PID結(jié)構(gòu)框圖
通常伸縮因子環(huán)節(jié)是根據(jù)系統(tǒng)輸入的誤差和誤差趨勢(shì)的改變而輸出其論域?qū)?yīng)的伸縮因子[9],實(shí)時(shí)調(diào)節(jié)初始論域,使普通的模糊規(guī)則可以最大限度地得到利用。在變論域Fuzzy-PID自整定系統(tǒng)中,伸縮因子的重要性是不言而喻的,它在一定程度上影響整個(gè)模型的動(dòng)靜態(tài)特性。常用的伸縮因子形式有函數(shù)映射類和模糊規(guī)則類[10]。
函數(shù)型伸縮因子:依據(jù)特殊函數(shù)映射關(guān)系來(lái)選擇伸縮因子[11]:
(6)
式中:α(x)為接入端對(duì)應(yīng)論域的伸縮因子;τ>0;ε為無(wú)線趨于零的正數(shù)[12]。
α(x)=1-λexp(-kx2)
(7)
式中:λ∈(0,1),k>0。
(8)
式中:β(x)為接出端對(duì)應(yīng)論域的伸縮因子;KI是比例常數(shù)。
模糊規(guī)則型伸縮因子的思想可簡(jiǎn)述為:假設(shè)誤差和誤差變化率減小(量化因子不變),此時(shí)將論域壓縮,使得模糊劃分更加精細(xì)化,從而間接提高了控制系統(tǒng)動(dòng)靜態(tài)特性。而誤差和誤差趨勢(shì)增大時(shí),為防止模型整體運(yùn)行特性惡化,論域需保持不變[13]。其控制規(guī)則如表2所示:

表2 輸入論域伸縮因子規(guī)則
表中:PB、PM、PS、Z、NS、NM、NB表示接入端e、ec的改變趨勢(shì);B、M、S、Z表示伸縮因子收縮或者膨脹程度。
3.2 函數(shù)型變論域Fuzzy-PID自整定
根據(jù)上述分析,假定系統(tǒng)參數(shù)受到溫度、電磁干擾、電流輸入波動(dòng)等因素干擾,普通的Fuzzy-PID控制參數(shù)可以自動(dòng)根據(jù)當(dāng)前系統(tǒng)參數(shù)來(lái)整定PID參量。但隨著控制系統(tǒng)的運(yùn)行,誤差e將會(huì)逐漸減小,有效論域?qū)?huì)變窄,從而使得模糊規(guī)則也越來(lái)越少,控制系統(tǒng)整定速度變慢,運(yùn)行特性變差。針對(duì)以上問(wèn)題,本文將引入函數(shù)型伸縮因子來(lái)對(duì)惡化的論域進(jìn)行在線調(diào)節(jié)。當(dāng)有效論域變窄時(shí),引入的伸縮因子使得整體論域收縮,從而增大了有效論域的范圍,使得系統(tǒng)在誤差e很小時(shí)也能充分利用原始的模糊規(guī)則,使Fuzzy-PID控制技術(shù)最大限度地發(fā)揮模糊控制的作用,以使系統(tǒng)達(dá)到良好的動(dòng)靜態(tài)特性。
結(jié)合實(shí)際情況,α(x)將采用使用較多的特殊函數(shù)映射型。如式(7)所示,式中參數(shù)取為:
式(7)中:x為系統(tǒng)的輸入變量e、ec。由此得到:
(9)
接出端論域?qū)?yīng)的β(x)需要考慮系統(tǒng)整體控制特性。本文的kp、ki、kd為控制器輸出,對(duì)電機(jī)的運(yùn)行特性具有決定性影響;再結(jié)合伸縮因子理論中的單調(diào)性原則,因此,kp、kd對(duì)應(yīng)的β(x)應(yīng)與e單調(diào)性保持相同,而ki對(duì)應(yīng)的β(x)應(yīng)與e單調(diào)性保持相反。結(jié)合文獻(xiàn)[12]中的結(jié)論,因此選取kp、ki對(duì)應(yīng)的β(x)為:
(10)
即:
(11)
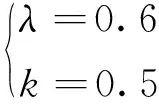
根據(jù)上述分析,結(jié)合普通Fuzzy-PID控制,本文在MTALB平臺(tái)上建立了函數(shù)型伸縮因子優(yōu)化的變論域Fuzzy-PID系統(tǒng)結(jié)構(gòu)圖,如圖3所示。
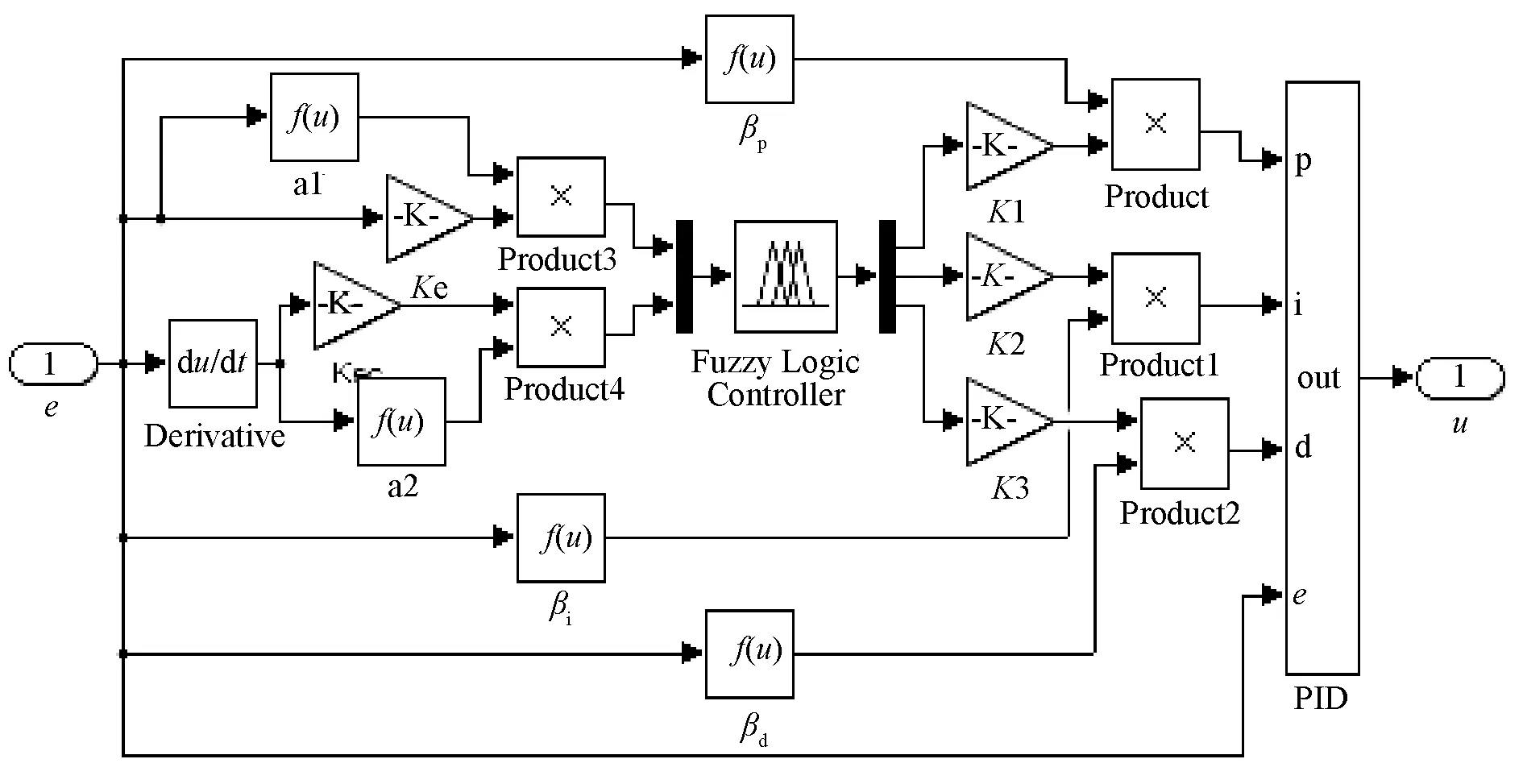
圖3 函數(shù)型變論域Fuzzy-PID自整定控制系統(tǒng)結(jié)構(gòu)圖
4 系統(tǒng)仿真
4.1 仿真系統(tǒng)
本文采用了先進(jìn)的空間矢量技術(shù),以變論域模糊PID為核心,通過(guò)坐標(biāo)變換完成轉(zhuǎn)矩和磁通的解耦,將永磁同步電機(jī)的非線性轉(zhuǎn)化為類似直流電機(jī)的線性系統(tǒng),從而實(shí)現(xiàn)磁通和轉(zhuǎn)矩的單一控制。模糊環(huán)節(jié)則是將光電碼盤檢測(cè)到轉(zhuǎn)速運(yùn)算后得到的e和ec接入二輸入接口中,變論域模糊推理,實(shí)時(shí)調(diào)整PID的3參數(shù),并經(jīng)過(guò)清晰化得到輸出變量u作用于被控對(duì)象。根據(jù)坐標(biāo)變換取得兩相靜止坐標(biāo)下的電流值,結(jié)合SVPWM控制算法輸出兩兩互補(bǔ)且考慮死區(qū)時(shí)間的6路PWM波驅(qū)動(dòng)IGBT管,產(chǎn)生對(duì)稱的驅(qū)動(dòng)信號(hào)作用于被控電機(jī),從而生成回旋磁場(chǎng),由磁力拖動(dòng)電機(jī)運(yùn)動(dòng)。圖4為變論域Fuzzy-PID伺服系統(tǒng)整體結(jié)構(gòu)圖。
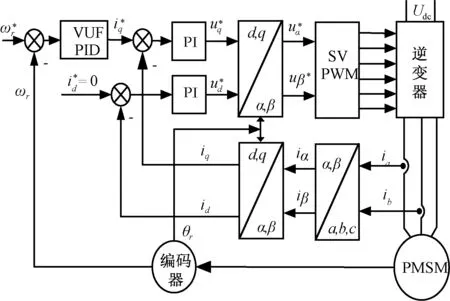
圖4 變論域Fuzzy-PID伺服矢量控制系統(tǒng)
4.2 仿真結(jié)果
為證明本文所采用的變論域Fuzzy-PID技術(shù)在實(shí)際工程實(shí)用性上優(yōu)于常規(guī)PID和普通Fuzzy-PID技術(shù)。將上述三個(gè)仿真模型都取:Id=0,轉(zhuǎn)速 1 000 r/min; 仿真過(guò)程中的具體加載情況為:t=0 s時(shí),給定啟動(dòng)負(fù)載轉(zhuǎn)矩TL=4 Nm;t=0.3 s時(shí),遭遇較大的負(fù)載轉(zhuǎn)矩TL=12 Nm。圖5為轉(zhuǎn)速仿真曲線,圖6為電磁轉(zhuǎn)矩仿真曲線。
圖5 轉(zhuǎn)速仿真曲線
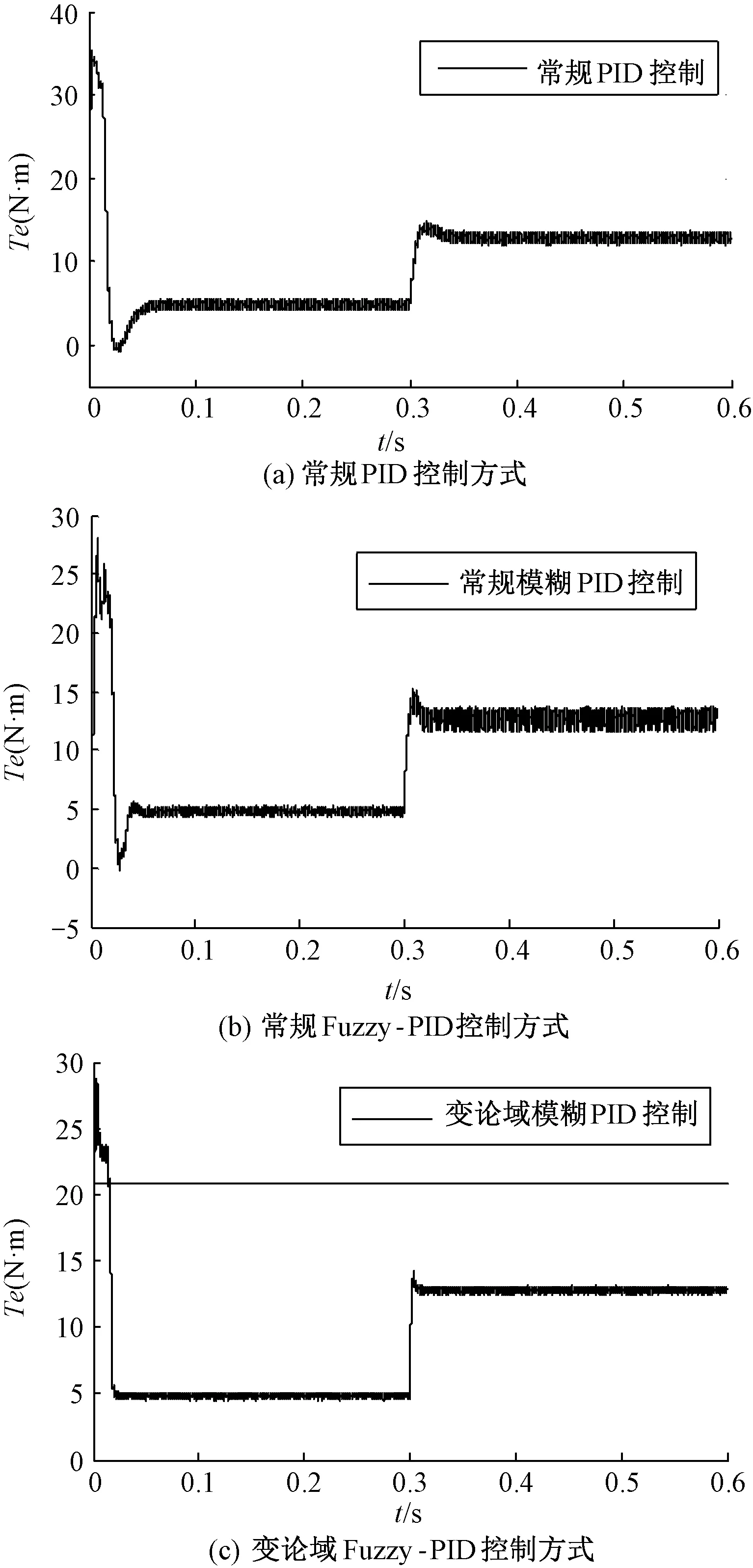
圖6 電磁轉(zhuǎn)矩仿真曲線
由仿真結(jié)果的轉(zhuǎn)速對(duì)比圖中顯示,常規(guī)PID和普通Fuzzy-PID響應(yīng)時(shí)間較長(zhǎng),超調(diào)量較大,轉(zhuǎn)矩存在一定的脈動(dòng),在0.3 s時(shí)遇到較大負(fù)載轉(zhuǎn)速出現(xiàn)了明顯的下降;而函數(shù)型伸縮因子變論域Fuzzy-PID響應(yīng)時(shí)間較短,幾乎實(shí)現(xiàn)零超調(diào),0.3 s加入較大負(fù)載時(shí),該系統(tǒng)能夠?qū)崿F(xiàn)快速自動(dòng)調(diào)整,轉(zhuǎn)速回升較快;由仿真結(jié)果的電磁轉(zhuǎn)矩對(duì)比可知,采用變論城PID控制的電磁轉(zhuǎn)矩調(diào)整也較穩(wěn)定。表3為3種控制方式下的仿真結(jié)果對(duì)比。
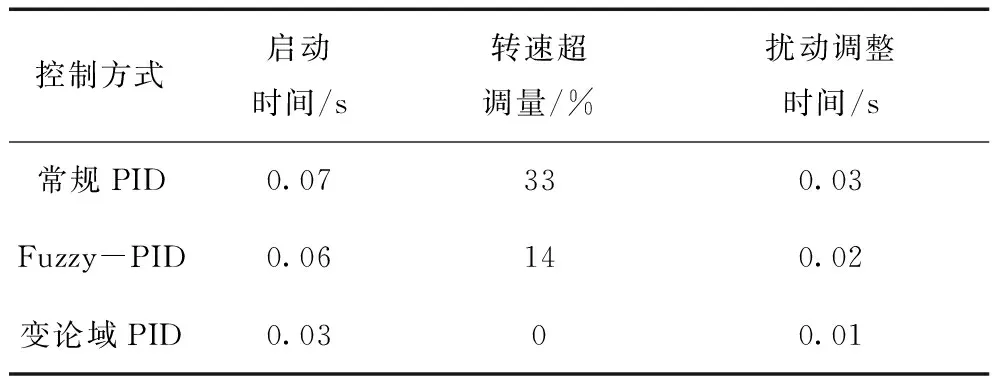
表3 3種控制方式下的仿真結(jié)果對(duì)比
如表3所示,本文提出的變論域PID控制啟動(dòng)時(shí)間和擾動(dòng)調(diào)整時(shí)間與其它兩種方法相比較短。由以上分析可以判斷本文提出的策略相比常規(guī)策略,具有更優(yōu)的動(dòng)靜態(tài)品質(zhì)。
5 結(jié)論
永磁同步電機(jī)(PMSM)以其較高功率因數(shù)和高功率密度,在工業(yè)控制中得到越來(lái)越多應(yīng)用。以往常規(guī)調(diào)速系統(tǒng)由于轉(zhuǎn)矩脈動(dòng)大,且常常受到電機(jī)自身參數(shù)與負(fù)載隨機(jī)性的影響,使得永磁同步電機(jī)系統(tǒng)整體特性受到影響。為優(yōu)化傳統(tǒng)PMSM調(diào)速系統(tǒng)性能,本文將常規(guī)Fuzzy-PID技術(shù)與變論域技術(shù)融合,提出變論域Fuzzy-PID策略。通過(guò)仿真對(duì)比,驗(yàn)證了該控制系統(tǒng)在減小超調(diào)量和減小轉(zhuǎn)矩脈動(dòng)上優(yōu)于常規(guī)控制策略,在工程上具有一定的應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45