異步電機(jī)分級離散變頻軟啟動器研究
2018-08-07 06:35:02王東峰王旖旎
電力科學(xué)與工程 2018年7期
王東峰, 王旖旎, 于 潔, 崔 倫, 王 毅
(1. 國網(wǎng)山東省電力公司 東營市河口區(qū)供電公司,山東 東營 257200; 2. 礦山災(zāi)害預(yù)防控制省部共建國家重點(diǎn)實驗室培養(yǎng)基地(山東科技大學(xué)),山東 青島 266590)
0 引 言
作為一種新型的電動機(jī)啟動方式,離散變頻軟起動器采用分級離散變頻軟啟動方式,主調(diào)壓電路采用3組反向并聯(lián)的晶閘管,也就是主電路結(jié)構(gòu)延續(xù)了傳統(tǒng)電子式軟起動器中的應(yīng)用,與之不同的是,其在保證預(yù)算成本不增長的前提下,通過改變傳統(tǒng)軟起動器的晶閘管觸發(fā)策略,基本達(dá)到跟變頻器一致的功能,有效地實現(xiàn)了對離散變頻軟起動器應(yīng)用范圍的擴(kuò)大,使其在某些需要重載起動或滿載起動的場合更為適用,表1所示為在各個行業(yè)中離散變頻軟起動器的應(yīng)用分布。
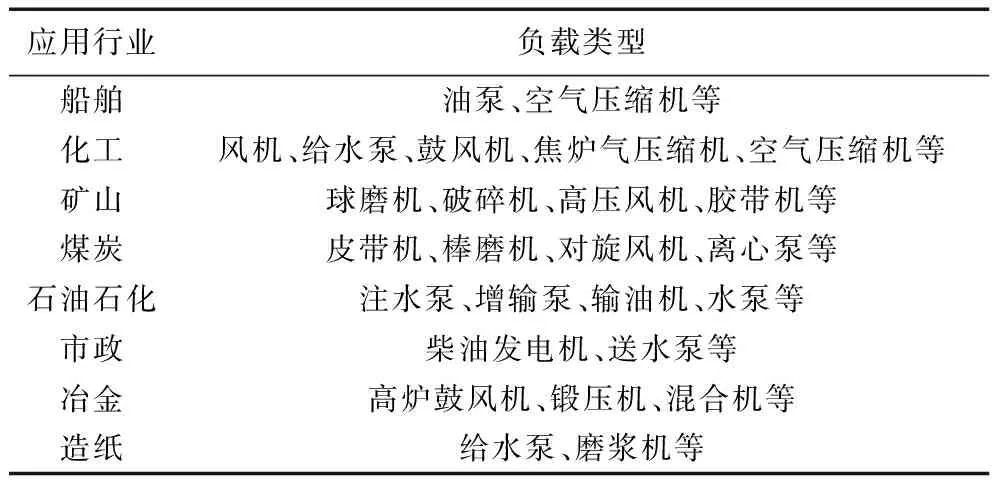
表1 離散變頻軟起動器應(yīng)用行業(yè)分布
1 分級離散變頻原理
對起動過程中的定子端電壓幅值和頻率進(jìn)行控制,使其同時發(fā)生變化,即同時降低電壓和頻率,從而相應(yīng)的提高電動機(jī)的起動轉(zhuǎn)矩,這就是離散變頻軟起動[4~6]。而在頻率降低的過程中,沒有經(jīng)過整流和逆變,只能分級將電壓頻率提升至工頻,變換過程不連續(xù)。用離散變頻的方法所形成的分頻電壓的頻率是工頻的整數(shù)分之一,即50 Hz/n,其中n為正整數(shù)。
通過有選擇的觸發(fā)晶閘管,達(dá)到工頻電壓的正半波導(dǎo)通或負(fù)半波部分導(dǎo)通或全部導(dǎo)通的目的,然后對三相電源的正弦量按照要求斬波,從而形成新的某一頻率的電壓波形,這就是離散變頻。如圖1中所示,晶閘管導(dǎo)通用陰影部分表示,晶閘管關(guān)斷用空白部分表示,由圖1可以看出,工頻電壓在每兩個周期內(nèi)僅有一個正半波和一個負(fù)半波導(dǎo)通,即新產(chǎn)生的電壓波形的周期無工頻電壓周期的兩倍,頻率則為其二分之一,也就是產(chǎn)生一個25 Hz的電壓波形。每一個分頻電壓都有一個觸發(fā)策略相對應(yīng),若要形成一套完整的異步電機(jī)離散變頻軟起動的方法,可把各分頻電壓連續(xù)起來,并依次進(jìn)行觸發(fā)。離散變頻軟起動并不只是簡單的對上下半波導(dǎo)通,還有實現(xiàn)增大起動轉(zhuǎn)矩,減小起動電流的目的。在起動過程中,還需對三相電源的以下各情況進(jìn)行分析:分頻相序、初相角組合、分頻次序、觸發(fā)角的選取以及高次諧波的影響等[7]。

圖1 25 Hz電壓波形
本文所設(shè)計的離散變頻主電路主要由GTO晶閘管調(diào)壓模塊、電壓檢測模塊、驅(qū)動電路模塊、電流檢測模塊、顯示模塊、主控制電路模塊組成,其工作原理如圖2所示。
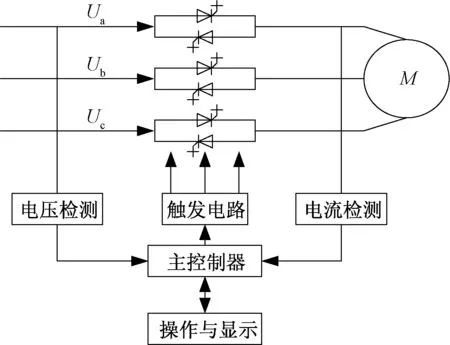
圖2 離散變頻主電路工作原理圖
2 分頻電壓最優(yōu)相位角組合
由于分頻以后的電壓中會含有不對稱分量,而不對稱分量中又包含了正序、負(fù)序和零序,因此電動機(jī)要想獲得正向或反向最大轉(zhuǎn)矩,我們必須將其中的正序分量和負(fù)序分量都做極端化處理,使得他們其中一個值最大化,另外一個值最小化,處理方法通常是采用對稱分量法,通過選取最優(yōu)的相位角來獲得最大轉(zhuǎn)矩[8~10]。
對稱分量法是在疊加原理的基礎(chǔ)上發(fā)展而來的,應(yīng)用對稱分量法可以將一組三相不對稱的分量分解成3組獨(dú)立且對稱的分量,即正序、負(fù)序和零序分量。其中正序和負(fù)序分量各相大小相等,相位角互差120°,零序分量各相大小相等,方向相同[11]。若有一組r分頻的三相不對稱電壓,設(shè)其有效值為UNA、UNB、UNC,初相位為0°、-α°、-β°,角頻率為ω,即:
(1)
應(yīng)用對稱分量法對其分解,分解之后的向量形式為:
通過依次剔除納入的文獻(xiàn)反復(fù)多次計算合并效應(yīng)量進(jìn)行敏感性分析,發(fā)現(xiàn)對最終結(jié)果沒有影響。HPV感染與肺癌相關(guān)性的合并HR及95% CI從0.85(0.67~1.08)到0.95(0.76~1.20)(圖3),HPV感染與肺腺癌相關(guān)性的合并HR及95% CI從0.59(0.37~0.95)到0.69(0.50~0.96)(圖4),驗證了本研究結(jié)果的穩(wěn)定性與可靠性。
(2)
式(2)中,等號右側(cè)第一列代表正序?qū)ΨQ分量,第二列代表負(fù)序?qū)ΨQ分量,第三列代表零序?qū)ΨQ分量。因為變換系數(shù)α,有:
(3)
由于1+α+α2=0,因此將上述不對稱三相正弦分量分解為3組對稱的正弦分量,其向量形式為:
(4)
(5)
(6)
將變換系數(shù)α代入分解后的三相分量后,其向量形式為:
(7)
因此,應(yīng)用對稱分量法所得到的3組對稱分量為:
(8)
利用式(8)對各分頻的初相角組合進(jìn)行計算,就可以得到最佳的相位角組合,經(jīng)計算得出:2分頻電壓獲得最大正向轉(zhuǎn)矩的相位角組合為:(0°,60°,210°),(0°,150°,210°),(0°,150°,300°);3分頻電壓獲得最大正向轉(zhuǎn)矩的相位角組合為:(0°,100°,260°),(0°,100°,200°),(0°,160°,260°);4分頻、7分頻、10分頻電壓獲得最大正向轉(zhuǎn)矩的相位角組合均為:(0°,120°,240°)。
3 離散頻段的選取
離散變頻的目的是通過降低機(jī)端電壓和電源頻率,以此來提高電動機(jī)起動轉(zhuǎn)矩。單從原理上分析,可以實現(xiàn)對工頻電壓的任意整數(shù)次分頻,且頻率越小起動轉(zhuǎn)矩越大,但在實際中,電動機(jī)都有極限頻率,當(dāng)頻率小于該極限值時,電動機(jī)則無法正常起動,因此不能無限地降低電源頻率。由式(9)轉(zhuǎn)矩表達(dá)式可知:
(9)
(10)
(11)

電動機(jī)采用離散變頻軟起動時,頻率從最小值一直緩慢變換到工頻50 Hz時,需要經(jīng)過多個中間頻率級的切換才能達(dá)到起動要求。在切換過程中,顯然并不是所有的頻率級都能滿足電動機(jī)的起動要求。因為某段分頻中可能會包含大量的諧波分量,不利于電動機(jī)的起動,達(dá)不到所需要的異步電機(jī)理想的起動要求。因此在設(shè)置頻率級的同時,頻率差不宜過大,并且在設(shè)定分頻級數(shù)時,分頻級數(shù)不能太多,也就是說所設(shè)定的電動機(jī)的最小頻率不能過低,若起動頻率過小,會達(dá)不到電動機(jī)的起動要求,從而使得電動機(jī)起動不起來[12]。故而電動機(jī)在整個起動過程中不能由4分頻直接切換到工頻,必須加入其它分頻來過渡,而4分頻和工頻之間只有2分頻和3分頻,且2分頻和3分頻中雖然沒有包含所需的對稱正序分量,但當(dāng)應(yīng)用所掌握的電力系統(tǒng)中的基本方法對稱分量法來對其進(jìn)行分解時,能夠解得正序分量的一個最大值,而這正是所想要的,因此可以把它作為我們所設(shè)定的分頻級數(shù)中的一部分,用來起動電機(jī)[13]。由于起動頻率不能過低,因此本文將10分頻作為最低分頻進(jìn)行分析。
離散變頻在該方式下起動時,電動機(jī)先從最低分頻10分頻起動,起動一段時間后,通過改變晶閘管的觸發(fā)策略,切換到下一分頻起動,如此循環(huán)往復(fù)直至工頻。為了保證頻率切換時的平穩(wěn)性,每個頻率運(yùn)行的時間應(yīng)該為該頻率運(yùn)行周期的整數(shù)倍。在各個頻率起動時,需要維持壓頻比恒定,而且各個分頻的起動時間對電機(jī)的正常運(yùn)行也很關(guān)鍵,正序分量對提高電動機(jī)的轉(zhuǎn)速有利,起動時間稍長,負(fù)序分量和不對稱分量對電動機(jī)不利,起動時間稍短。
綜上所述,電動機(jī)采用離散變頻軟起動時,分頻起動次序為:
f/10(5 Hz)→f/7(7.14 Hz)→f/4(12.5 Hz)→f/3(16.7 Hz)→f/2(25 Hz)→f/(50 Hz)
各個分頻所對應(yīng)的作用時間為:0.8 s、0.56 s、1.12 s、0.36 s、0.4 s。
4 分級離散變頻軟啟動仿真
前面我們對離散變頻軟起動的各項參數(shù)進(jìn)行了理論分析,本部分將在理論分析的基礎(chǔ)上,利用MATLAB/SIMULINK工具箱,對三相異步電機(jī)的直接起動、斜坡軟起動、限流軟起動和離散變頻軟起動等方式進(jìn)行建模和仿真,并對仿真結(jié)果進(jìn)行分析。其中離散變頻軟起動模型如圖3所示,在仿真過程中,用到的各部分參數(shù)如下:三相電源有效值為220 V,頻率為50 Hz,A相初相位為0°,B、C兩相相位角依次滯后120°;三相異步電機(jī)選用的是Asynchronous Machine SI Units,具體參數(shù)為:額定功率Pn=10 kW,額定電壓Vn=380 V,額定頻率fn=50 Hz,定子繞組電阻Rs=0.435 Ω,定子繞組電感L1 s=0.002 H,轉(zhuǎn)子繞組電阻Rr= 3 Ω,轉(zhuǎn)子繞組電感L1 r=0.002 H,互感系數(shù)Lm=0.069 31 H,轉(zhuǎn)動慣量J=2 kg·m2,磁極對數(shù)P=4。
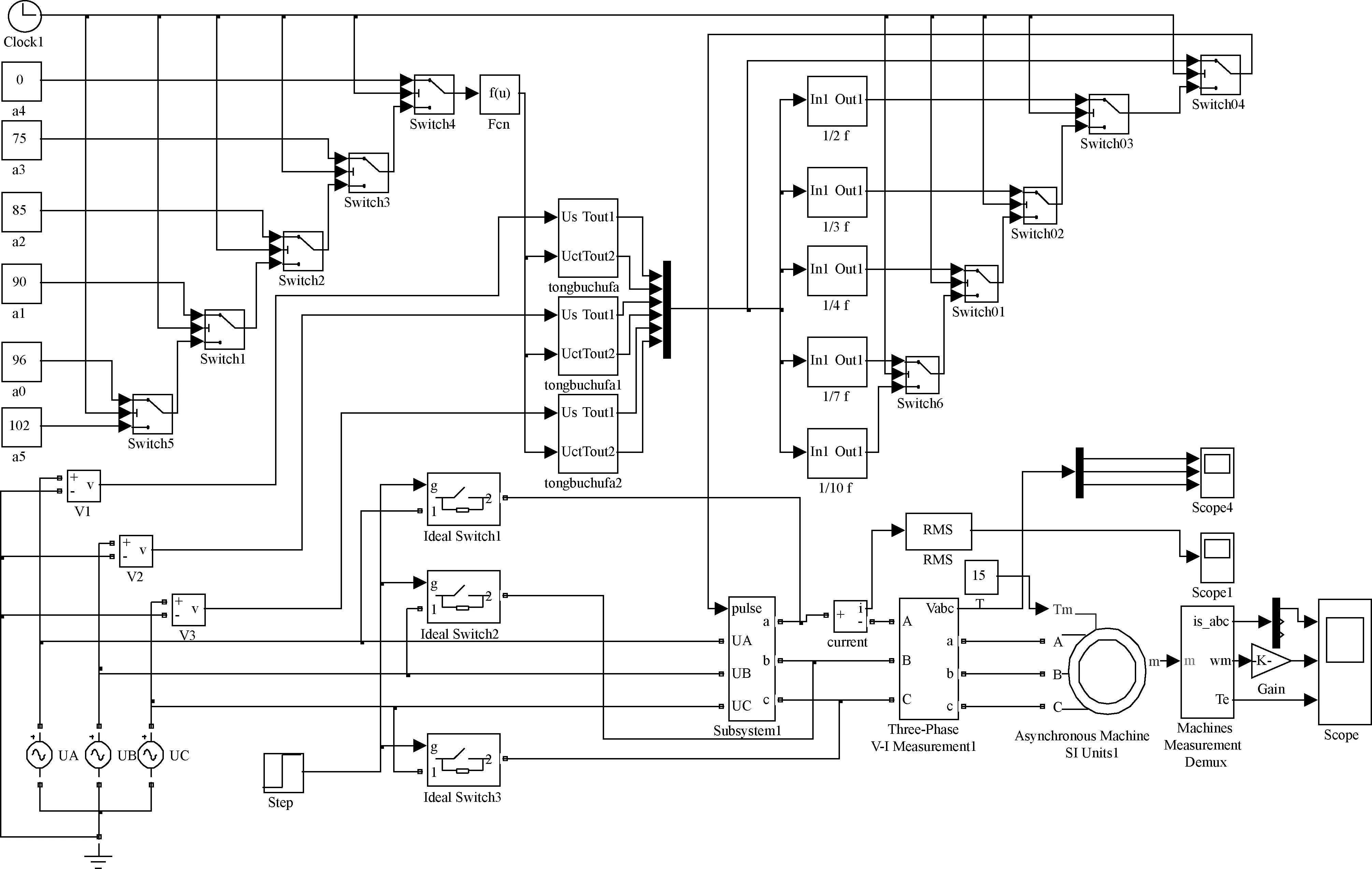
圖3 離散變頻軟起動模型
10分頻觸發(fā)脈沖合成模塊的內(nèi)部構(gòu)造如圖4所示。
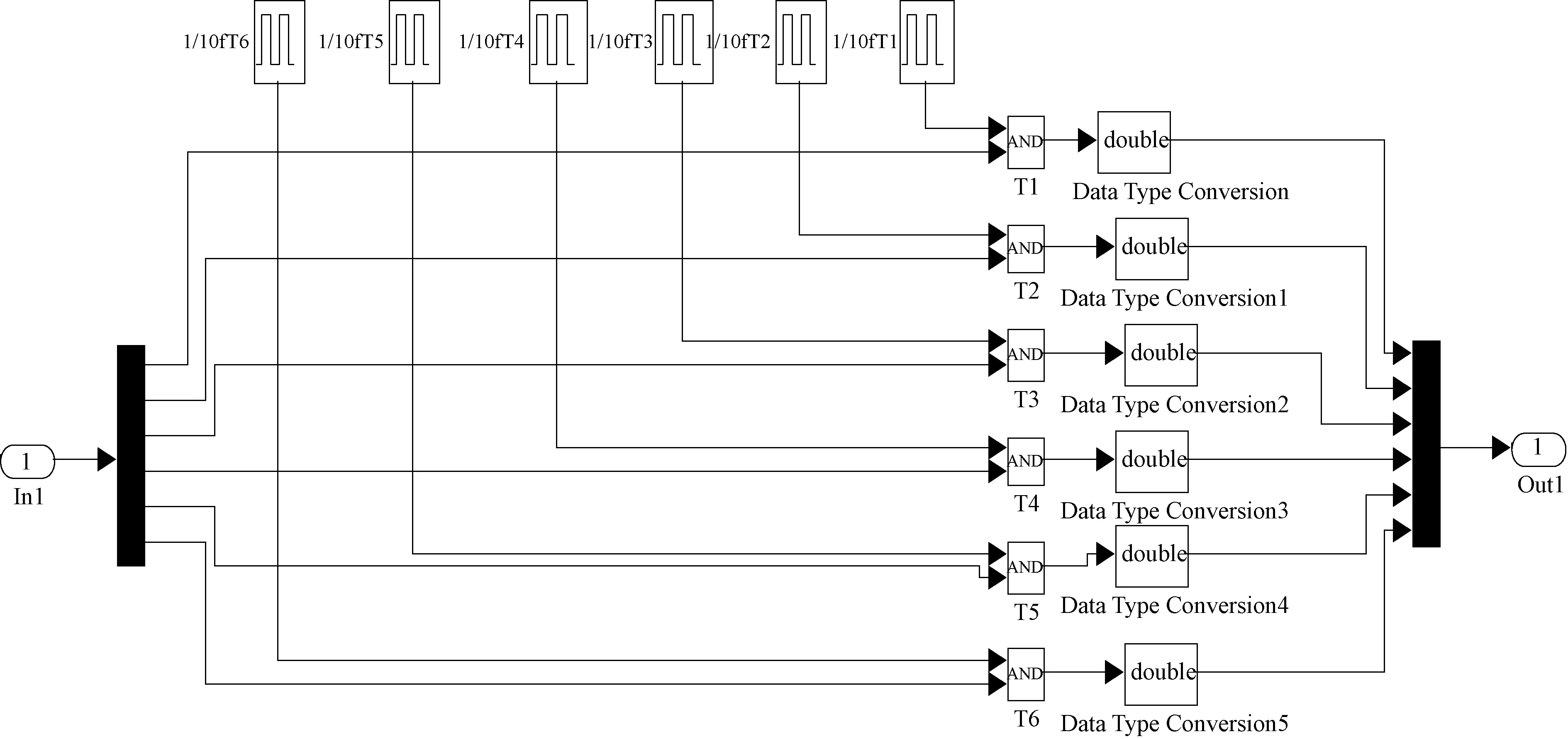
圖4 10分頻觸發(fā)脈沖合成模塊內(nèi)部構(gòu)造
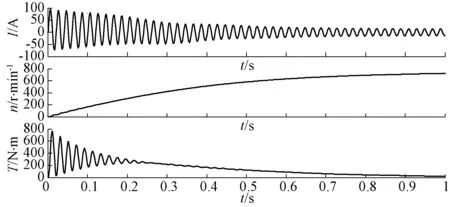
圖5 直接起動電流、轉(zhuǎn)速、轉(zhuǎn)矩波形

圖6 斜坡軟起動電流、轉(zhuǎn)速、轉(zhuǎn)矩波形

圖7 限流軟起動電流、轉(zhuǎn)速、轉(zhuǎn)矩波形
利用上述模型對電路進(jìn)行仿真,圖5為電機(jī)直接起動時的仿真波形。由以上仿真結(jié)果可以看出,電動機(jī)在直接起動時,定子電流可以瞬間達(dá)到100 A,約為額定電流的10倍,而定子電流最大有效值約為62 A。在0~1 s內(nèi),電動機(jī)轉(zhuǎn)速快速上升,最終大約穩(wěn)定在700 r/min,而電動機(jī)的轉(zhuǎn)矩脈動較大,波動范圍為0~800 N·m,電動機(jī)的起動過程約在0.9 s時結(jié)束,之后進(jìn)入穩(wěn)定運(yùn)行狀態(tài)。圖6為斜坡軟起動時的仿真波形。由圖6可知,電動機(jī)采用斜坡軟起動時,起動時間較長,大約需要7 s才能達(dá)到穩(wěn)定。起動過程中,電動機(jī)的最大電流約為30 A,而穩(wěn)定電流約為12 A,最大起動電流為穩(wěn)定電流的2.5倍,滿足起動要求。轉(zhuǎn)速增加非常平滑,避免了電動機(jī)的轉(zhuǎn)速出現(xiàn)大范圍波動,且轉(zhuǎn)矩脈動較小,最大為-50~50 N·m,因此不能帶重載或滿載起動,使用范圍受到了較大限制。圖7為限流軟起動時的仿真波形。由圖7可知,電動機(jī)采用限流軟起動時,起動時間較短,約1.8 s就能達(dá)到穩(wěn)定狀態(tài),最大起動電流為50 A,穩(wěn)定電流為20 A,最大起動電流為穩(wěn)定電流的2.5倍,符合起動要求。在起動過程中,電機(jī)轉(zhuǎn)速平滑上升,沒有出現(xiàn)大的轉(zhuǎn)速波動,約在1.8 s時,達(dá)到了額定轉(zhuǎn)速。起動瞬間,電動機(jī)起動轉(zhuǎn)矩快速上升,約在0.7 s時達(dá)到最大值250 N·m,之后逐步下降,并趨于穩(wěn)定,在整個過程中轉(zhuǎn)矩波動較小,約為-50~250 N·m,雖然限流軟起動能在起動瞬間,大幅減小電動機(jī)的起動電流,但由于電流檢測有一定的滯后性,因此后續(xù)沖擊電流較大,容易對電機(jī)和負(fù)載產(chǎn)生不利影響。
圖8為離散變頻軟起動的仿真波形。
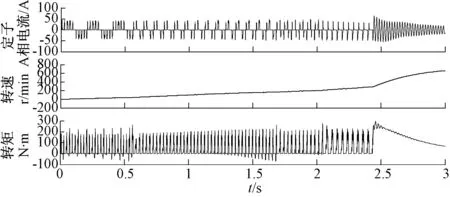
圖8 離散變頻軟起動電流、轉(zhuǎn)速、轉(zhuǎn)矩波形
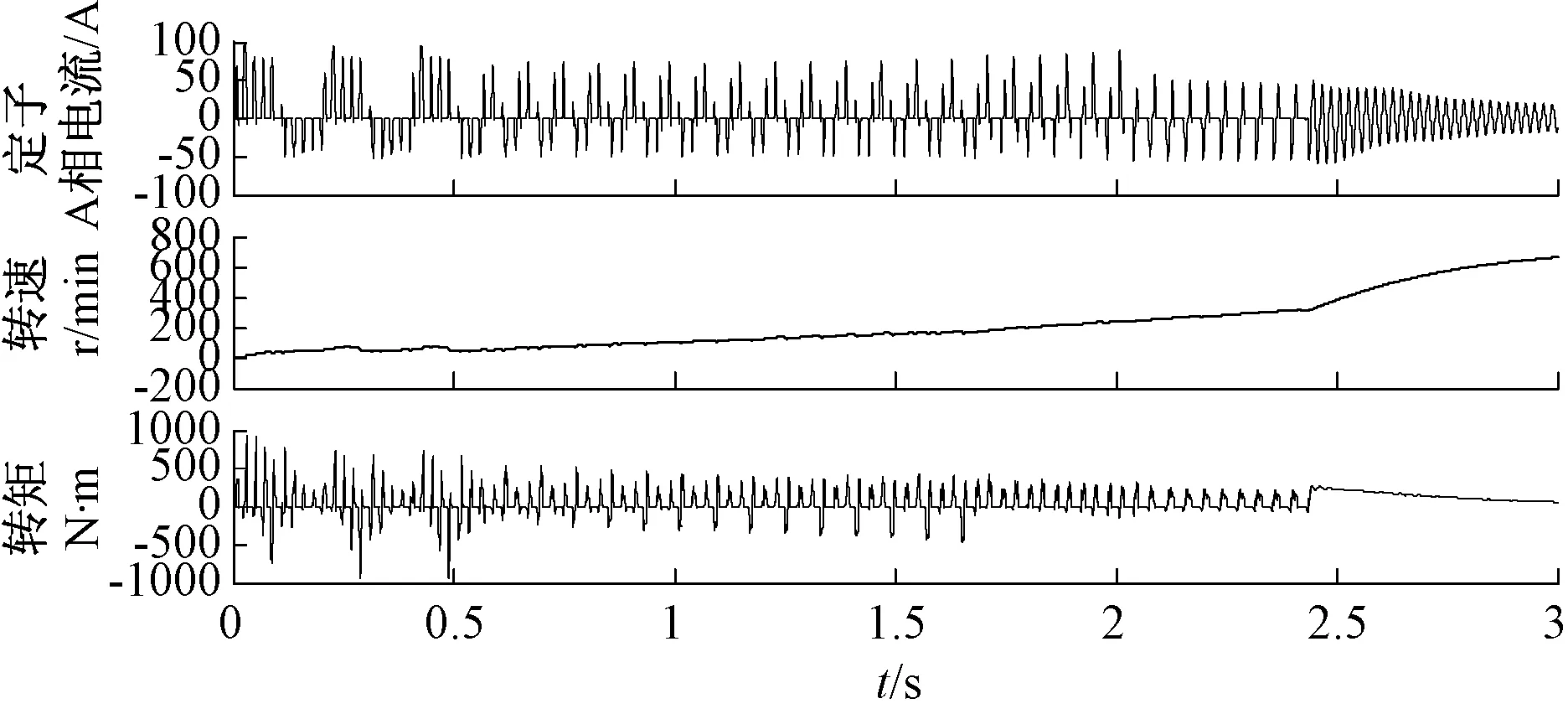
圖9 采用GTO晶閘管的離散變頻軟起動電流、轉(zhuǎn)速、轉(zhuǎn)矩波形
從圖8可以看出,當(dāng)離散變頻主調(diào)壓電路采用普通可控硅晶閘管時,電動機(jī)的起動電流相對較小,但當(dāng)由2分頻向工頻過渡時,電流波動較大,過渡不平滑,起動轉(zhuǎn)矩較大,最大可達(dá)250 N·m,為傳統(tǒng)軟起動方式的5~6倍。圖9為在仿真實驗過程中將全控型晶閘管GTO作主調(diào)壓電路時的仿真圖形,從圖中可以看出,此時電動機(jī)起動電流較大,接近于100 A,但由二分頻向工頻過渡時,電流波動較小,過渡非常平滑,且相同時間內(nèi)電動機(jī)轉(zhuǎn)速也相對較高,在0~0.5 s內(nèi)起動轉(zhuǎn)矩明顯增大,最大可達(dá)900 N·m,為普通晶閘管離散變頻軟起動的2~3倍。
綜上所述,離散變頻軟起動可以有效地降低電動機(jī)的起動電流,大幅提高起動轉(zhuǎn)矩,通過仿真驗證了離散變頻理論在提高電動機(jī)起動轉(zhuǎn)矩方面的正確性和優(yōu)越性。但同時也可看到其仍有不足之處,如離散變頻后的電壓和電流為離散的非正弦量,因而會包含大量的諧波分量;其次,在離散變頻起動過程中,電動機(jī)的起動電流和轉(zhuǎn)矩波動較大,起動過程并不平穩(wěn),這是以后繼續(xù)研究和改進(jìn)的重點(diǎn)。
5 實驗驗證
實驗裝置是在離散變頻軟起動器的基礎(chǔ)上搭建出來的,由于在實驗環(huán)境中沒有本文設(shè)計中所采用的10KW的異步電動機(jī),因此在實驗過程中采用了額定電壓220 V、額定功率90 W、額定轉(zhuǎn)速1 400 r/min的三相交流異步電動機(jī),為了測得轉(zhuǎn)速,同步采用額定電壓220 V、額定功率355 W、額定轉(zhuǎn)速1 500 r/min的同步電機(jī),另外還有主控板、試驗臺、示波器、純電阻等實驗設(shè)備。
圖10為在實驗過程中測得的電動機(jī)直接起動時的電流波形圖,從圖中可以看出,當(dāng)電動機(jī)直接起動時,起動電流較大,最大可達(dá)3 A,為該電動機(jī)額定電流的7.5倍,但是到達(dá)穩(wěn)定所需要的時間較短,約為1.2 s。圖11和圖12分別為電動機(jī)采用限流軟起動時的電流波形圖和轉(zhuǎn)速波形圖,從中可以看出定子電流緩慢上升,起動瞬間電流較小,約為0.6 A。電動機(jī)轉(zhuǎn)速平穩(wěn)上升,大約2.8 s以后電動機(jī)趨于穩(wěn)定,達(dá)到穩(wěn)定所需要的時間要比直接起動長[14~16]。圖13為實驗過程中用示波器采集到的電動機(jī)離散變頻軟起動時串聯(lián)電阻兩端的電壓波形圖,因為在本實驗環(huán)境中示波器沒有直接用來測電流的探頭,因此實驗過程中,在定子端口處串聯(lián)一個電阻,測得電阻兩端的電壓波形即為電流的波形,因為對電阻而言,電壓和電流同相位。從圖中可以看出,在向工頻過渡過程中,電流出現(xiàn)了抖動,與仿真結(jié)果一致。
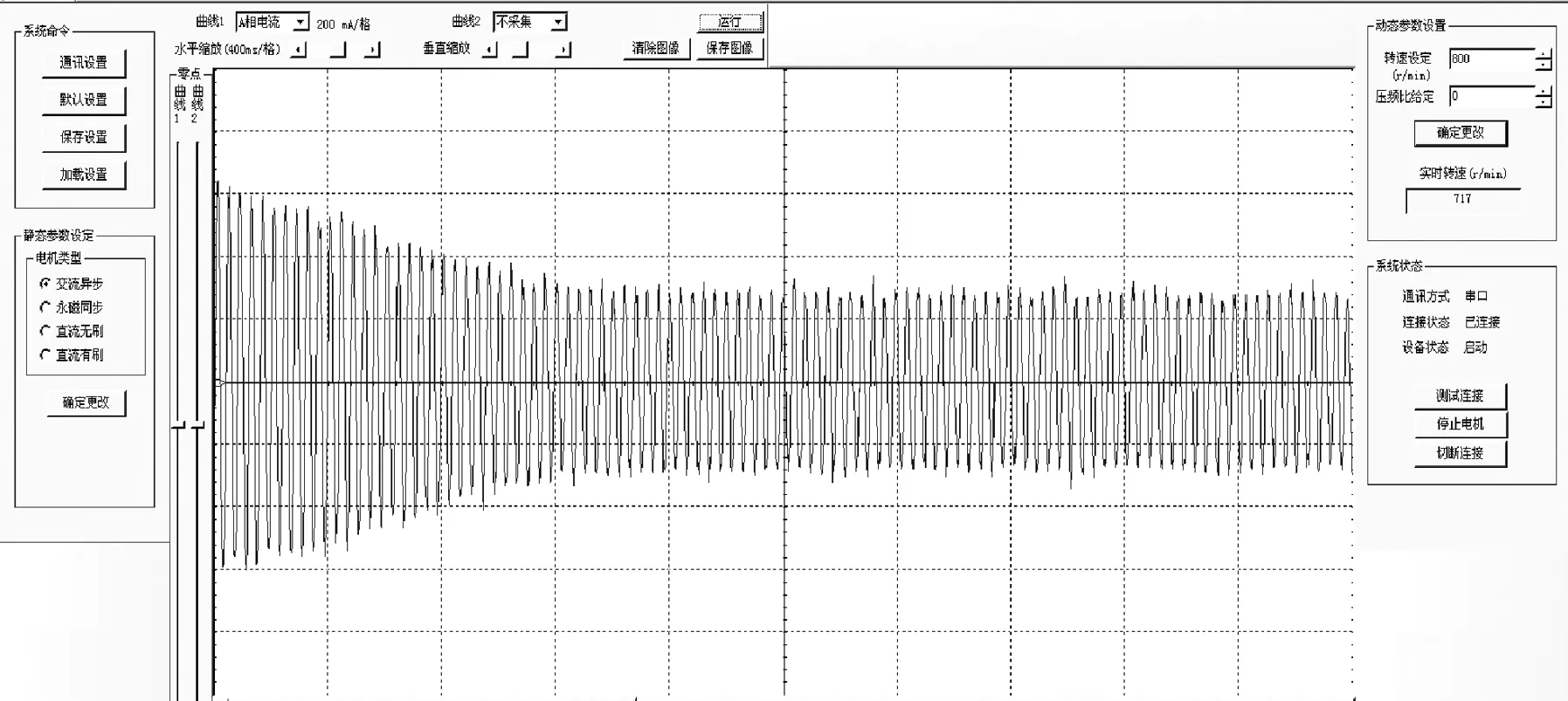
圖10 電動機(jī)直接起動實測電流波形
圖11 電動機(jī)限流軟起動實測電流波形
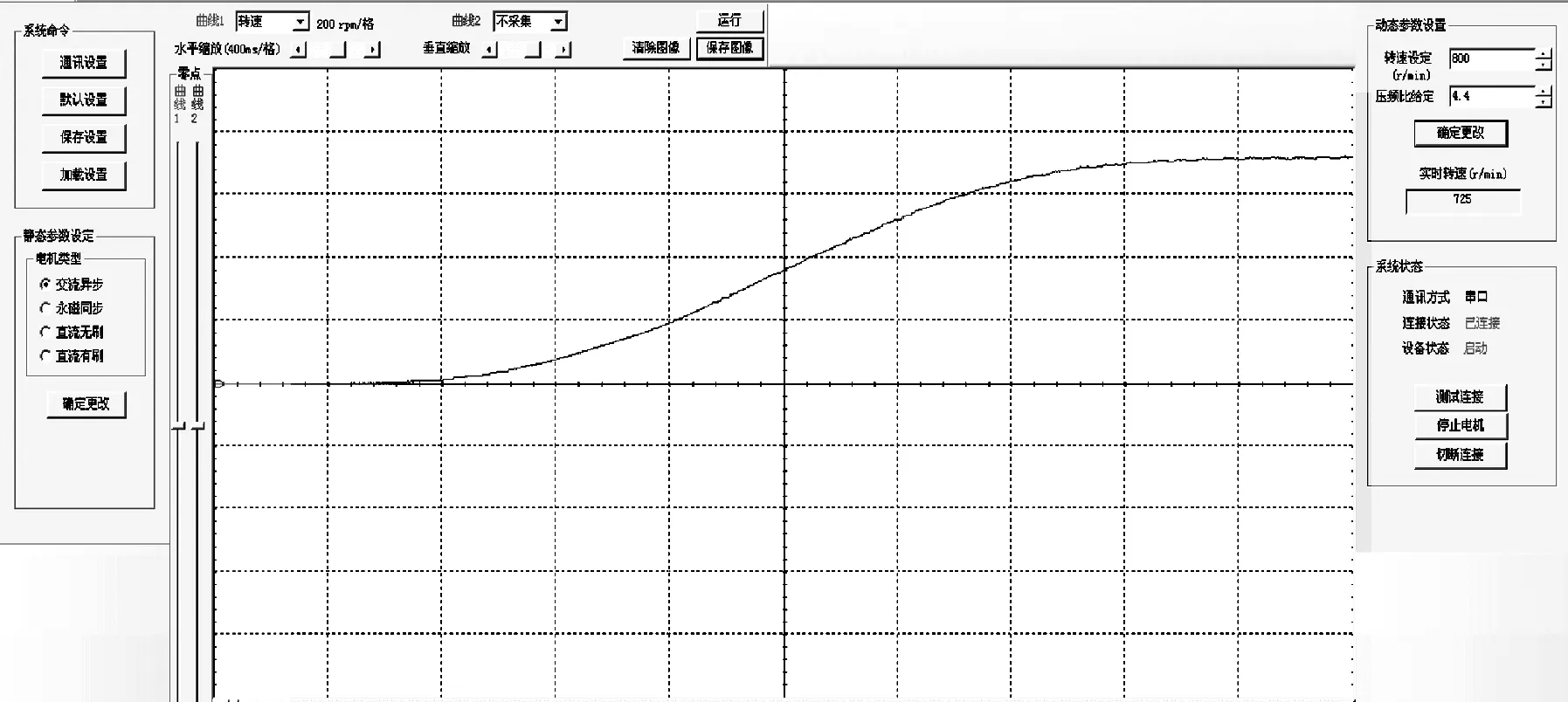
圖12 電動機(jī)限流軟起動實測轉(zhuǎn)速波形
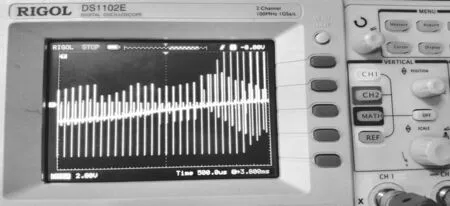
圖13 電動機(jī)離散變頻軟起動實測電流波形
6 結(jié)論
本文在原有的離散變頻原理基礎(chǔ)上,通過分析其原理及分頻電壓最優(yōu)相位角組合、離散頻段的選取等,對調(diào)壓主電路和保護(hù)電路進(jìn)行了進(jìn)一步研究,提出了一種改進(jìn)的異步電機(jī)分級離散變頻軟起動方式。利用MATLAB仿真軟件搭建離散變頻軟起動模型,并將仿真結(jié)果與幾種傳統(tǒng)的軟起動仿真結(jié)果作對比,驗證了分級離散變頻軟起動不僅能有效的減小起動電流,還能提高起動轉(zhuǎn)矩。最后通過實驗,驗證了本文理論分析與仿真的正確性。