基于非線性自適應脈沖噪聲處理技術的甚低頻通信大氣噪聲抑制算法及仿真實現?
2018-08-01 12:36:46劉翠海
艦船電子工程 2018年7期
陳 巍 劉翠海
(1.海軍潛艇學院研究生隊 青島 266199)(2.海軍潛艇學院航海觀通系 青島 266199)
1 引言
甚低頻大氣噪聲是一種低振幅的高斯型背景噪聲下的突發性脈沖噪聲,主要是由雷電瞬時放電所引起的[1~2]。發生閃電時,會產生閃電電磁脈沖,從而會使接收機性能惡化[3]。這種脈沖噪聲會比周圍的噪聲要高90dB甚至會更高[4],它是影響甚低頻通信的最主要因素。通常,接收機接收到的是疊加了噪聲干擾的MSK信號,將MSK信號從噪聲中提取出來的主要方法是采用恰當的信號處理器來抑制噪聲。目前,應用比較廣泛的脈沖噪聲抑制方法有:削波器、限幅器、熄滅器以及采用帶通濾波、擴時技術等處理方法[5]。文獻[6~7]提出利用小波降噪和中值濾波組合濾波設計對數據進行預處理,提高了抑制噪聲的效果。本文采用了一種基于變步長LMS算法的非線性自適應信號處理技術對大氣噪聲進行抑制處理。
2 非線性自適應噪聲處理器設計
非線性自適應處理器的核心部分是自適應波形預測器。它能夠通過某種自適應算法,自動地調整權向量的值,使輸出信號能夠預測出輸入MSK信號的波形。本文采用的自適應算法是:基于雙曲正切函數的變步長LMS算法。該算法具有能夠在獲得較快收斂速度和跟蹤速度的情況下保證有較小的穩態誤差的優點,比單純采用LMS算法能夠保證較快的收斂速度和穩態誤差[8~10]。

圖1 非線性自適應噪聲處理器的結構
2.1 自適應波形預測器模型
自適應波形預測器采用兩組單頻正弦信號作為線性組合器的輸入信號,其頻率分別為載波的中心頻率,兩組正弦信號的相位相差π/2。在每一個采樣時刻,其輸出信號都是它們的線性組合。通過不斷地調整權向量和的值,使輸出信號逼近MSK信號。圖2為自適應波形預測器結構圖。
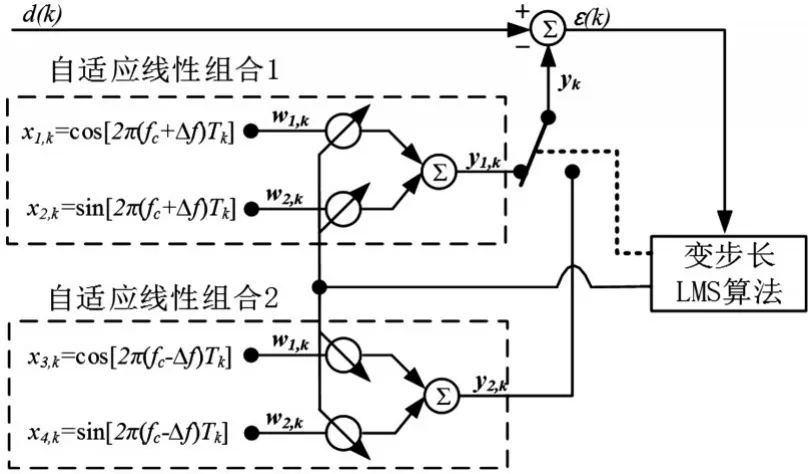
圖2 自適應波形預測器結構
這種自適應波形預測器通常是用于單頻干擾下使用自適應噪聲消除技術[11],需要不斷地調整加權向量來跟蹤波形的變化。由于MSK信號具有相位連續的特點,所以,一旦波形預測器跟蹤上MSK信號,那么權向量W的值就不需要做大的變化。
2.2 自適應非線性組合器
自適應非線性組合器是自適應波形預測器的核心部件,可以將多路輸入映射為若干個輸出。本文采用的是4路信號輸入映射為2路輸出的結構,具體結構如圖3所示。
圖中輸入端為一組由元素 x1,x2,x3,x4組成的輸入信號,與之對應的一組可調權向量 w1,w2,w3,w4,yk為求和單元的輸出信號。
在第k個采樣時刻,即t=tk時,
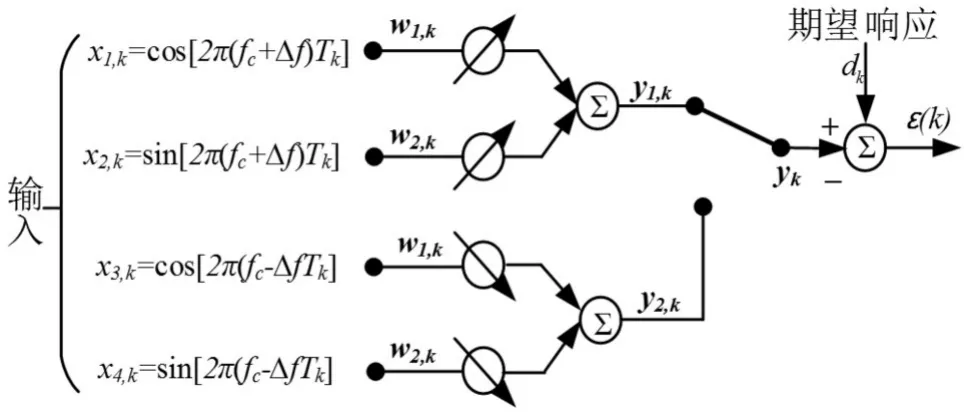
圖3 自適應非線性組合器一般結構
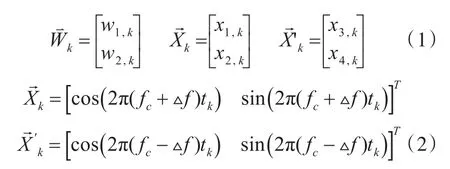
線性組合器的輸出信號為

由LMS算法的遞推公式:

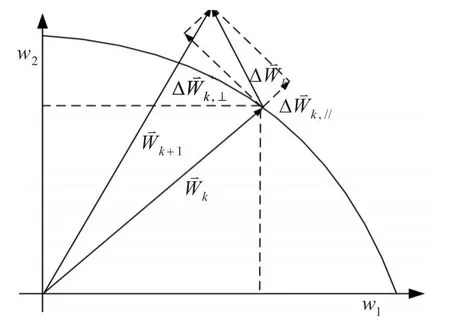
圖4 加權調節向量的分解
以加權矢量W1為橫坐標,W2為縱坐標,畫出如圖所示的權向量變化圖形。加權調節向量被分解成水平部分和垂直部分,其中,表示調節波形的振幅調整,表示調節波形的相位調整。



2.3 脈沖噪聲檢測器
假設在第k個采樣時刻,接收信號中出現了尖峰脈沖噪聲即:

此時的誤差信號:


脈沖噪聲檢測器實際上是對混有脈沖噪聲的接收信號按照某種閾值來進行限幅或者置零處理,能夠刪除包含絕大部分噪聲能量的脈沖成分,對于整個信號的處理起到非常關鍵的作用。
3 系統仿真及結果分析
仿真模擬在大氣噪聲干擾條件下,采用非線性自適應噪聲處理技術的甚低頻通信系統在不同信噪比條件下的系統性能對比。系統結構框圖如圖5所示。

圖5 甚低頻通信系統仿真流程圖

圖7 誤碼率與信噪比對比曲線圖
文獻[12]認為大氣噪聲是一種窄帶的隨機過程,符合指數正態分布。電壓偏差Vd值反應了大氣噪聲脈沖噪聲的自然情況。通過輸入的信噪比SNR和Vd來控制噪聲比例,合成包含高斯背景噪聲和脈沖噪聲的大氣噪聲。分別控制Vd等于2、4、7、10等不同的值來控制脈沖噪聲的強度,數值越大代表噪聲強度越高。
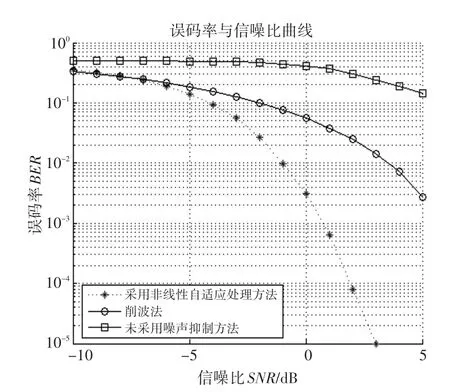
圖6 三種信號波形對比圖
圖6分別為已調MSK信號、接收到的混有噪聲的MSK信號,以及經非線性自適應算法之后的輸出信號(Vd=10)。仿真結果顯示,經過非線性自適應處理器處理之后,信號波形變得平滑,相位保持連續,在出現脈沖噪聲的時段內,信號的波形依然連續,沒有大的起伏。
圖7為在相同信噪比下條件下采用不同處理方法的誤碼率對比曲線圖(Vd=10)。由圖可見,與單純采用削波技術相比,采用非線性自適應噪聲處理方法能夠有效降低系統誤碼率。
4 結語
采用變步長LMS算法的自適應處理器有較快的收斂速度和穩態誤差,并且能夠有效抑制脈沖噪聲的干擾。通過對系統的仿真及結果分析表明,受脈沖噪聲干擾嚴重的通信系統,采用非線性自適應處理器能夠有效提高系統接收的性能并降低系統誤碼率。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00