AR模型的譜分辨率及小信噪比下的性能分析?
2018-08-01 12:37:06劉晞遠(yuǎn)胡昊穎郭萬里
艦船電子工程 2018年7期
關(guān)鍵詞:模型
劉晞遠(yuǎn) 胡昊穎 吳 珊 郭萬里
(西安電子科技大學(xué)通信工程學(xué)院 西安 710126)
1 引言
譜估計(jì)的主要方法有非參數(shù)化法和參數(shù)化法,或稱經(jīng)典譜估計(jì)方法和現(xiàn)代譜估計(jì)方法。經(jīng)典譜估計(jì)方法是以傅立葉變換為基礎(chǔ)的,雖然具有計(jì)算效率高的優(yōu)點(diǎn),但它沒有將信號的可用信息結(jié)合到估計(jì)過程中,有著頻率分辨率低和旁瓣泄漏嚴(yán)重的固有缺點(diǎn)[1]。現(xiàn)代譜估計(jì)的一個(gè)重要方法就是將被觀測過程表示為一個(gè)AR過程,通過對過程參數(shù)的估計(jì),可以直接計(jì)算其功率譜密度。該方法可以獲得更精確,頻率分辨率更高的譜估計(jì)[2]。
2 AR模型現(xiàn)代譜估計(jì)
2.1 AR模型的建立[3]
現(xiàn)代譜估計(jì)的方法一般按照以下三個(gè)步驟進(jìn)行:1)為被估計(jì)的隨機(jī)過程確定或選擇一個(gè)合理的模型,這種選擇可能是基于有關(guān)信號是如何產(chǎn)生的先驗(yàn)知識;2)根據(jù)已知觀測數(shù)據(jù)估計(jì)模型的參數(shù);3)用估計(jì)得到的參數(shù)代入模型參數(shù)估算功率譜。
一個(gè)AR過程x(N)可以表示為單位方差白噪聲驅(qū)動的全極點(diǎn)濾波器的輸出。p階AR過程的功率譜是[4]
在實(shí)際應(yīng)用中,常需根據(jù)信號的有限個(gè)取樣值來估計(jì)AR模型的參數(shù),求其參數(shù)的方法主要有:Yule-Walker法或自相關(guān)法;協(xié)方差法;Burg法;修正的協(xié)方差法。以上方法都可以用由時(shí)間平均代替集合平均的最小平方準(zhǔn)則推導(dǎo)得到。
2.2 AR模型參數(shù)估計(jì)的典型算法
2.2.1 自相關(guān)法[5]
自相關(guān)法是直接估計(jì)AR參數(shù)。用最小平方時(shí)間平均代替集合平均準(zhǔn)則,有

自相關(guān)法的計(jì)算效率高,且能保證預(yù)測誤差是最小相位的,但數(shù)據(jù)兩端要附加零取樣值,實(shí)際上等效于數(shù)據(jù)加窗,這將使參數(shù)估計(jì)的精度下降。特別是當(dāng)數(shù)據(jù)段很短的時(shí)候,加窗效應(yīng)就更為嚴(yán)重。
2.2.2 Burg算法[6]
Burg法與自相關(guān)法不同,它不直接估計(jì)AR參數(shù),而是先估計(jì)反射系數(shù),然后利用Levinson遞推算法由反射系數(shù)求得AR參數(shù)。Burg法在希望利用已知數(shù)據(jù)段兩端以外的未知數(shù)據(jù)的同時(shí),又設(shè)法保證了使預(yù)測誤差濾波器是最小相位的[7]。因此,Burg算法是基于 Levinson-Durbin[8]遞推公式,對誤差序列的最小化準(zhǔn)則進(jìn)行修正的AR模型參數(shù)估計(jì)法。
Burg法首先要估計(jì)反射系數(shù),使用的準(zhǔn)則是前項(xiàng)和后項(xiàng)預(yù)測誤差功率估計(jì)的平均值最小準(zhǔn)則(預(yù)測誤差功率估計(jì)用時(shí)間平均代替集合平均)。因此,Burg法估計(jì)反射系數(shù)的準(zhǔn)則表示

該式的前項(xiàng)和后項(xiàng)預(yù)測誤差濾波器的工作都是在數(shù)據(jù)段上進(jìn)行的(數(shù)據(jù)段兩端不需要補(bǔ)充零)。
2.3 AR譜估計(jì)的異常現(xiàn)象
1)虛假譜峰[7]
如果自相關(guān)函數(shù)的取樣值或反射系數(shù)值的估計(jì)沒有誤差,那么AR(p)模型參數(shù)的估計(jì)值在理論上應(yīng)該為

式中,api是AR(p)模型的精確參數(shù)值,是其估計(jì)值。但是實(shí)際上自相關(guān)函數(shù)或反射系數(shù)的估計(jì)是有誤差的,一般來說,這就有可能使得對于大于p的i值有≠0,相應(yīng)的將會產(chǎn)生n-p個(gè)額外的極點(diǎn)。若這些額外的極點(diǎn)出現(xiàn)在單位圓附近,就會形成虛假的譜峰。
2)譜線分裂[8]
如果要估計(jì)的隨機(jī)過程是由一個(gè)正弦信號疊加噪聲所構(gòu)成,那么AR譜估計(jì)中譜峰出現(xiàn)的位置與正弦信號的初相位有著密切關(guān)系。而對于某些算法,還會觀察到AR譜估計(jì)中存在兩個(gè)靠的很近的譜峰,似乎在隨機(jī)過程中還存在著另一個(gè)正弦信號。這一現(xiàn)象稱為譜線分裂。
其中,Burg算法可以觀察到AR譜估計(jì)出現(xiàn)譜線分裂現(xiàn)象。由經(jīng)驗(yàn)總結(jié)出,在以下幾種情況下最容易發(fā)生譜線分裂現(xiàn)象[9]:(1)高信噪比;(2)正弦分量的初始相位為45°的奇數(shù)倍;(3)數(shù)據(jù)序列長度為正弦分量1/4周期的奇數(shù)倍;(4)估計(jì)的AR參數(shù)的數(shù)目與數(shù)據(jù)的個(gè)數(shù)相比占有較大的百分比;(5)虛假譜峰常伴隨產(chǎn)生譜線分裂現(xiàn)象,這與數(shù)據(jù)記錄長度太短有關(guān)。因此,增加數(shù)據(jù)記錄長度,這種現(xiàn)象便隨即消失。
2.4 模型階數(shù)的選擇[10]
在AR譜估計(jì)中,模型階次的選擇是一個(gè)關(guān)鍵問題。階次太低將會導(dǎo)致過于平滑的譜估計(jì)結(jié)果,頻率分辨率過低;而階次太高,將會產(chǎn)生虛假譜峰,并且估計(jì)的方差也會增大。文中采用最終預(yù)測誤差準(zhǔn)則(FPE)判斷最優(yōu)階次。該準(zhǔn)則的計(jì)算公式為[11]
其中:N為數(shù)據(jù)點(diǎn)數(shù);p為待估計(jì)參數(shù),對AR(n)模 型 ,p=n;σa2為模型殘差。
文獻(xiàn)指出,估計(jì)階次的上界L與樣本長度N之間的關(guān)系為[12],但文中既沒有給出理論推導(dǎo),也沒有給出實(shí)際驗(yàn)證。通過實(shí)驗(yàn)研究表明,將樣本長度的均方根值作為滾動軸承AR模型的定階上界,可以得出滿意的AR模型分析結(jié)果。
3 Levinson算法和Burg算法下的AR模型的譜分辨率性能分析
AR模型功率譜估計(jì)性能,可以用Matlab仿真實(shí)現(xiàn)。本文仿真選取采樣點(diǎn)數(shù)為256(中等長度的數(shù)據(jù)),采樣頻率為100的信號。為了深入研究兩種算法的譜分辨率性能,采用下列自編程序代替Matlab內(nèi)置函數(shù)在Matlab上進(jìn)行了仿真,如下:
3.1 預(yù)測階次p對兩種算法譜分辨率的影響
1)預(yù)測階次p對Levinson算法仿真結(jié)果的影響
使用Matlab仿真了F1=20Hz;F2=21Hz條件下不同頻率對應(yīng)的功率譜圖,如圖1~圖5所示。
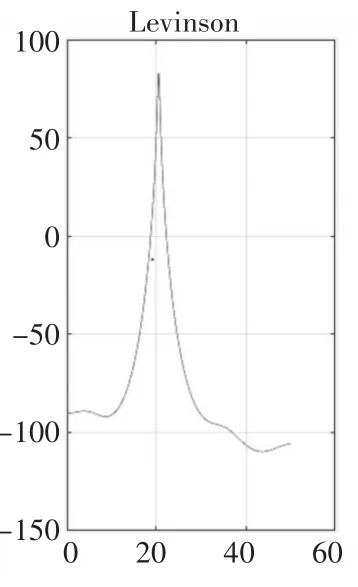
圖1 p=5時(shí)
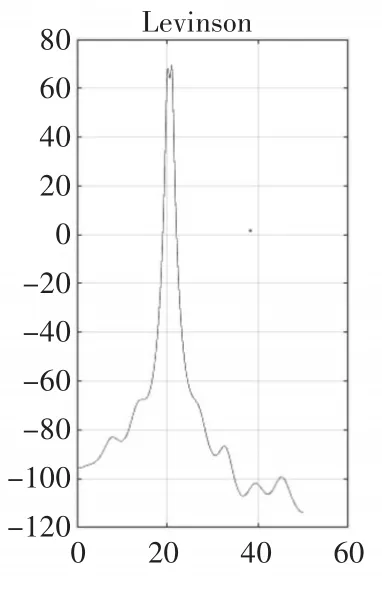
圖2 p=10時(shí)
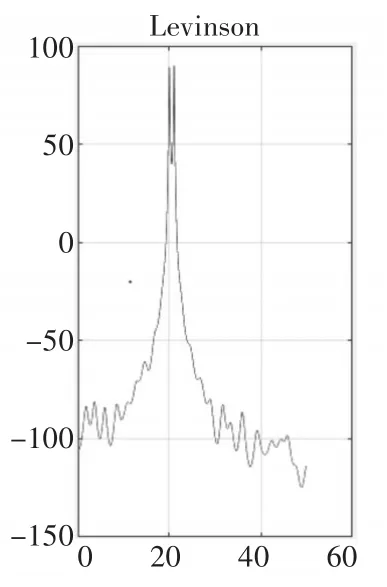
圖3 p=20時(shí)
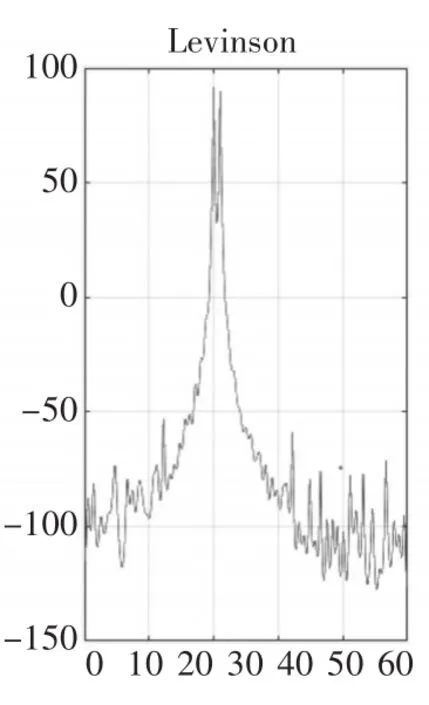
圖4 p=56(N/4)時(shí)

圖5 p=128(N/2)時(shí)
仿真結(jié)果顯示:Levinson算法的分辨率較低,在p=20時(shí)分辨率才能達(dá)到1Hz;階次越大,譜線的虛假譜峰現(xiàn)象越嚴(yán)重,圖5中最大虛假譜峰已經(jīng)達(dá)到-50dB;Levinson算法的仿真沒有出現(xiàn)譜裂現(xiàn)象。
2)預(yù)測階次p對Burg算法的影響
使用Matlab仿真了F1=20Hz;F2=21Hz條件下不同頻率對應(yīng)的功率譜圖,如圖6~圖10所示。

圖6 p=5時(shí)
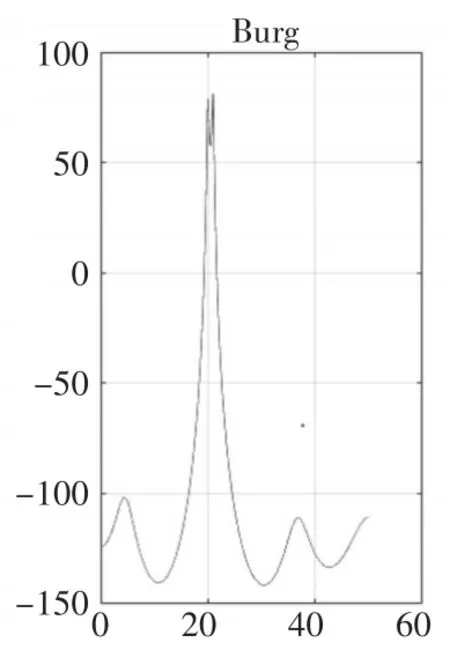
圖7 p=10時(shí)
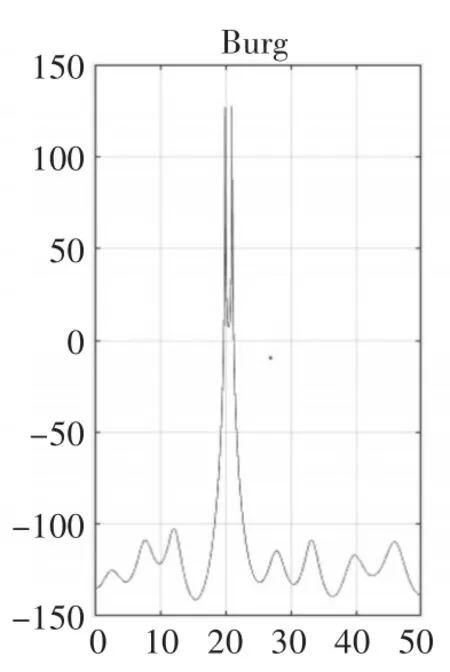
圖8 p=20時(shí)
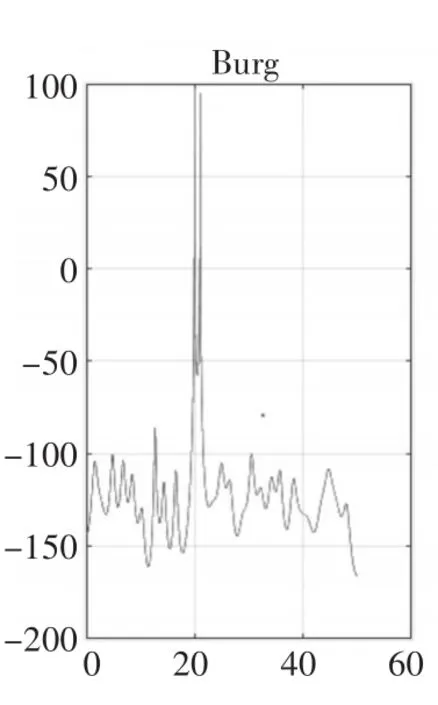
圖9 p=56(N/4)時(shí)

圖10 p=128(N/2)時(shí)
仿真結(jié)果顯示:階次較低時(shí),Burg法與Levinson法性能相似,如圖1與圖7所示,但是隨著階次的提高,Burg法的譜峰比Levinson法更加尖銳,準(zhǔn)確度更高,如圖10和圖11比圖4和圖5尖銳很多,但是虛假譜峰現(xiàn)象更加嚴(yán)重,譜線更加不穩(wěn)定,毛刺較多,圖11中p=N/2時(shí)出現(xiàn)譜裂現(xiàn)象,嚴(yán)重影響了Burg法的性能。
3.2 在不同的頻率差下,兩種算法譜分辨率的比較
圖11(a)、(b)、(c)的信號是兩個(gè)單頻信號的疊加加上一個(gè)高斯白噪聲(信噪比為10dB)的功率譜估計(jì)圖。x=sin(2*pi*F1*n)+sin(2*pi*F2*n)+(1/20)*randn(size(n))
采樣點(diǎn)數(shù):256,采樣頻率:100。
圖 11(a)、(b)、(c)分別為頻率差為 3Hz、5Hz、1Hz時(shí),兩種方法在FPE最佳階次準(zhǔn)則下的AR模型功率譜圖。
分析:
1)圖11(a)所示,在相同的信號情況下,用FPE準(zhǔn)則算出的Levinson最佳階次比Burg算法的低。(不論倆個(gè)信號頻差多少),在最佳階次下,Burg算法的結(jié)果毛刺較多,功率譜的方差較大,而Levinson法的譜線相對平滑。
2)Levinson算法的分辨率比Burg低,在圖(c)中兩個(gè)信號頻率差為1Hz,Levinson已經(jīng)不能分辨。
3)圖11(b)所示,Burg算法有譜裂現(xiàn)象,特別是當(dāng)階次較高時(shí)。所以FPE準(zhǔn)則對于Burg算法預(yù)測的階次偏高,應(yīng)稍微降低階次來減少譜裂,而對Levinson算法來說階次偏低,應(yīng)增加階次來提高分辨率。
3.3 信號頻率差與最佳階次的關(guān)系
圖12(a)、圖12(b)分別是Levinson算法、Burg算法最佳階次隨頻率差的變化圖。
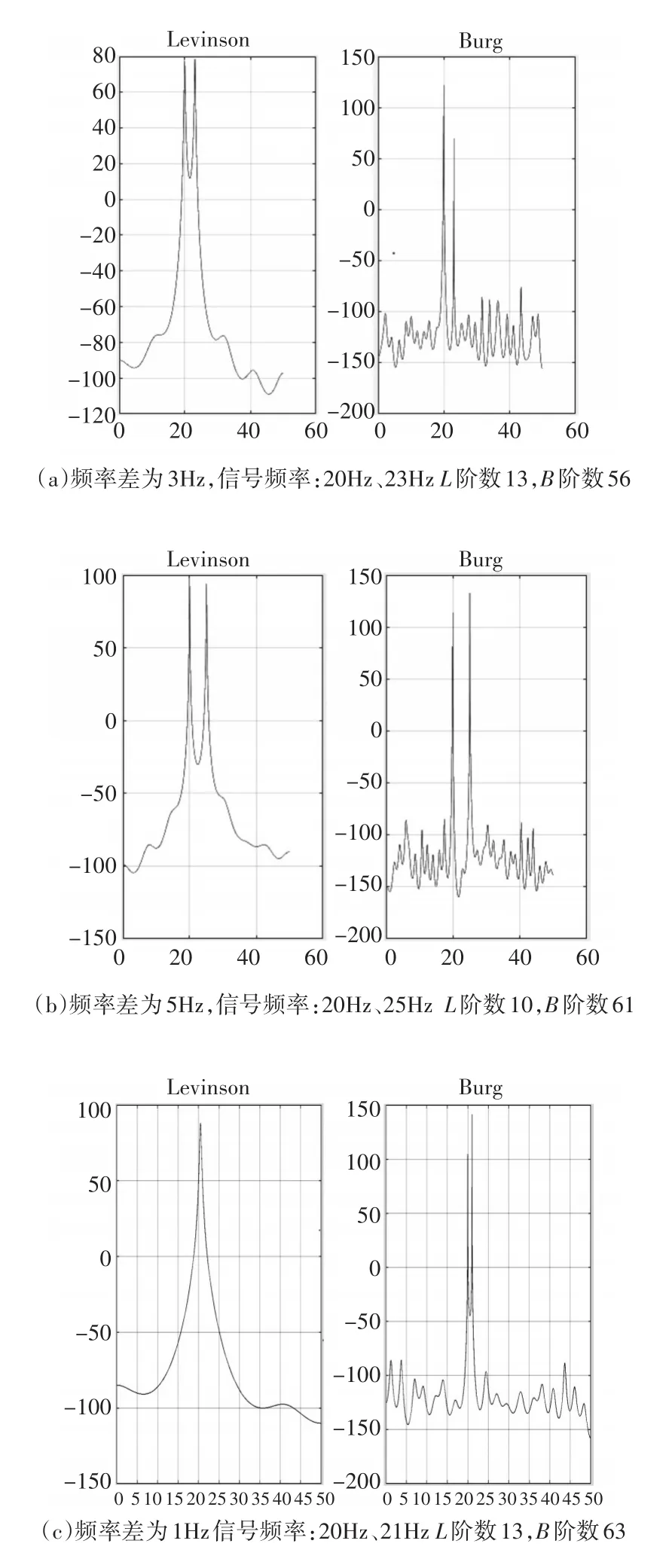
圖11 兩種方法在FPE最佳階次準(zhǔn)則下的AR模型功率譜圖
分析:1)實(shí)驗(yàn)數(shù)據(jù)表明用FPE準(zhǔn)則計(jì)算出的最佳階次確實(shí)隨著頻率差的變換而變換。
2)對于Levinson算法,最佳階次隨頩差的變換曲線呈現(xiàn)單峰性質(zhì),在3Hz最有出現(xiàn)最大的階次。而對于Burg算法,最佳階次普遍偏高,且最佳階次隨頩差的變換呈現(xiàn)雙峰特征。
3.4 信號頻率差對AR模型預(yù)測誤差的影響
分析:1)Levinson算法的誤差較大,Burg算法的誤差較小,這主要是由于Burg算法FPE最佳階次準(zhǔn)則中階次較高引起的。2)與Levinson相比,Burg法的誤差變化相對較小,預(yù)測精度比較穩(wěn)定。
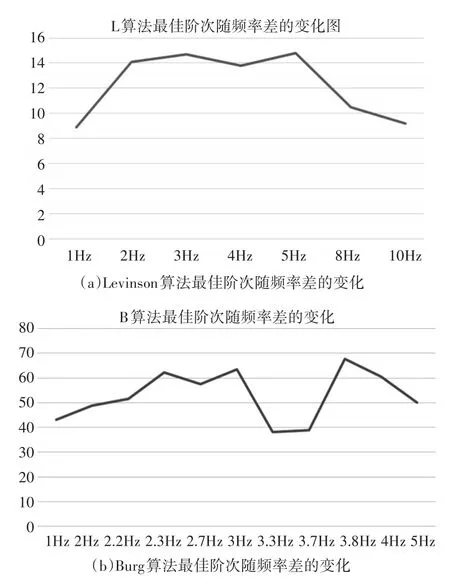
圖12 兩種算法最佳階次隨頻率差的變化圖
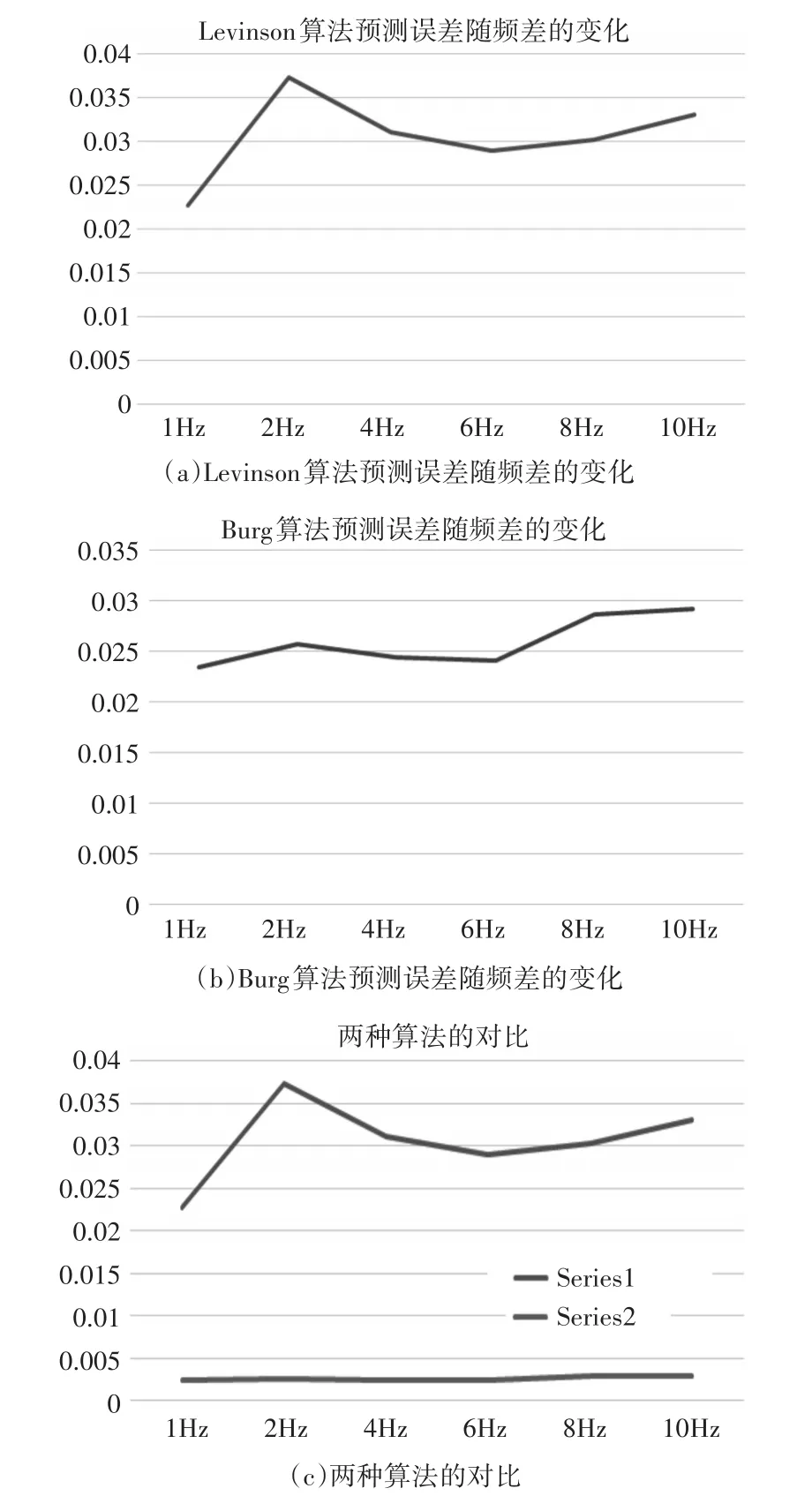
圖13 兩種算法預(yù)測誤差隨頻差的變化圖
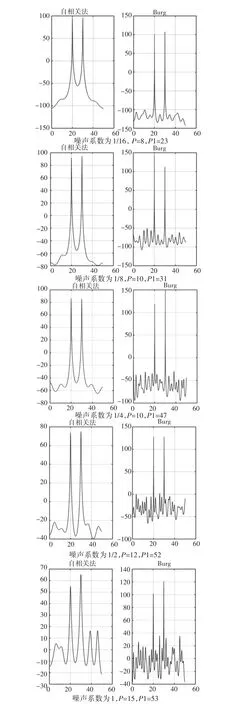
圖14 信噪比變化下兩種方法的性能比較
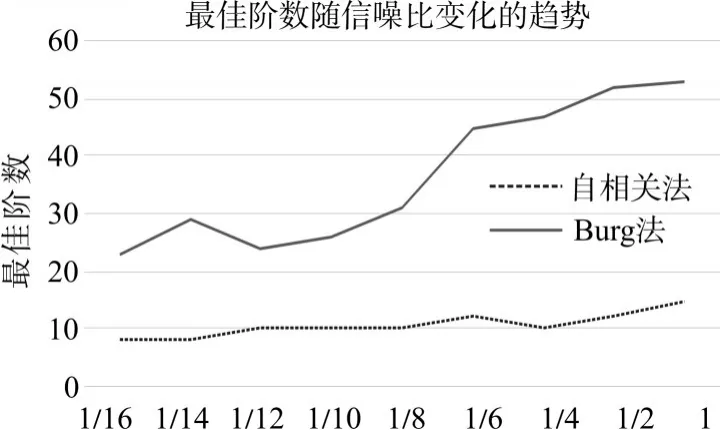
圖15 最佳階次隨信噪比變化的趨勢
4 小信噪比性能分析
本文采用了以下方法進(jìn)行了仿真:x=sin(2*pi*F1*n)+sin(2*pi*F2*n)+m*randn(size(n))
m為噪聲系數(shù),可知,m越大,信噪比越小。采樣點(diǎn)數(shù):256,采樣頻率:100,信號頻率:20Hz、30Hz。
4.1 信噪比變化下兩種方法的性能
輸出階數(shù)P,輸出階數(shù)P1(p為自相關(guān)法,p1為Burg法)
由此發(fā)現(xiàn),在信噪比逐漸減小的過程中,自相關(guān)法的最佳階次變化不大且緩步上升,而Burg法的最佳階次卻有了明顯的增加,并且虛假譜峰現(xiàn)象更加嚴(yán)重,這表明了Burg法在較小的信噪比的情況下性能會下降,而自相關(guān)法卻沒有較為明顯的變化。
4.2 相同階數(shù)下改變噪聲系數(shù)對兩種方法的影響
x=sin(2*pi*F1*n)+sin(2*pi*F2*n)+m*randn(size(n)),m為噪聲系數(shù),可知,m越大,信噪比越小。采樣點(diǎn)數(shù):256,采樣頻率:100,信號頻率:20Hz、30Hz。本次選取一個(gè)較大的階數(shù)p=p1=61,改變噪聲系數(shù),觀測兩種方法預(yù)測的功率譜,見圖16。
由這些圖進(jìn)行比對后發(fā)現(xiàn),相同的階次情況下,在噪聲系數(shù)較小時(shí)(信噪比較大),Levinson算法分辨率較低,主瓣寬度較大,尖峰處沒有Burg法尖銳,盡管Burg法虛假譜峰現(xiàn)象比Levinson法嚴(yán)重,但總體而言,Levinson法性能相較于Burg法較差。
5 結(jié)語
本文通過Matlab仿真分析,對比研究了Lenvinson(自相關(guān))算法和Burg算法下的AR模型的譜分辨率,分析了小信噪比情況下的AR模型的性能,主要結(jié)論如下:
1)預(yù)測階次較低時(shí),Burg法與Levinson法性能相似,但是隨著階次的提高,Burg法的譜峰比Levinson法更加尖銳,準(zhǔn)確度更高,但虛假譜峰現(xiàn)象更加嚴(yán)重。
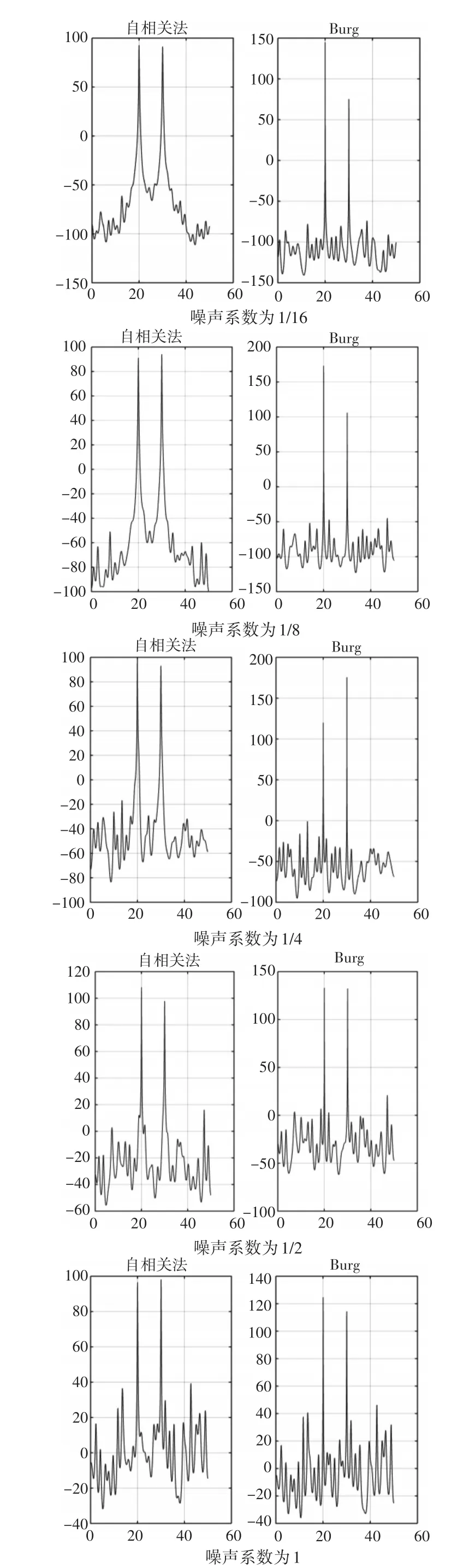
圖16 改變噪聲系數(shù),Levinson算法和Burg法預(yù)測的功率譜比較
2)在最佳階次下,Burg算法功率譜的方差較大,而Levinson法的譜線相對平滑。FPE準(zhǔn)則對于Burg算法預(yù)測的階次偏高,應(yīng)稍微降低階次來減少譜裂,而對Levinson算法來說階次偏低,應(yīng)增加階次來提高分辨率。
3)與Levinson相比,Burg法的預(yù)測誤差隨頻差的變化相對較小,預(yù)測精度比較穩(wěn)定。
4)Burg法在較小的信噪比的情況下性能會下降,而自相關(guān)法卻沒有較為明顯的變化。
5)相同的階次情況下,在噪聲系數(shù)較小時(shí)(信噪比較大),Levinson算法分辨率較低,主瓣寬度較大,尖峰處沒有Burg法尖銳,盡管Burg法虛假譜峰現(xiàn)象比Levinson法嚴(yán)重,但總體而言,Levinson法性能相較于Burg法較差。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19