地磁傳感器在交通數據采集中的應用研究?
2018-08-01 12:37:06祁海祿
艦船電子工程 2018年7期
祁海祿
(中國船舶重工集團公司第七一〇研究所 宜昌 443003)
1 引言
隨著機動車保有量的快速增長,城市交通“停車難、行車難”的問題日益凸顯。提高城市交通管理的指揮調度效率,提升交通管理的科學技術水平,建立和完善交通誘導系統,實時發布各種動態交通信息、停車信息,合理引導出行和停車,減少道路無效占用時間,已成為緩解城市交通擁堵問題的有效措施[1]。其中,車輛檢測是交通參數獲取的最前端,為智能交通系統的科學調度和管理提供實時可靠的參考數據,是系統的重要組成部分[2]。
目前,用于車輛檢測的傳感器較多,如視頻圖像傳感器、環形地感線圈、微波傳感器、超聲波傳感器、紅外傳感器、地磁傳感器[3]等,視頻圖像傳感器成本高,對天氣條件較為敏感;環形地感線圈檢測準確率高,但安裝施工耗時費力,會影響安裝路面和自身的使用壽命;微波傳感器容易受金屬和相同波段頻率的微波干擾,影響檢測精度;超聲波傳感器成本低,但易受氣候影響,檢測精度受限;紅外傳感器對環境溫度變化較敏感,也存在一定的輻射污染;地磁傳感器檢測準確率與環形地感線圈相近,安裝施工便捷,對氣候變化不敏感,環境適應性較好,已廣泛應用于車輛檢測設備中[4~8]。本文在對兩種常見地磁傳感器的性能特點進行分析比較的基礎上,基于性能更優的各向異性磁阻傳感器設計了一種交通數據采集設備,用于獲取城市道路固定斷面的交通數據。
2 地磁傳感器車輛檢測原理
地球磁場強度大約0.5Oe~0.6Oe,在一定區域內的磁場強度基本是恒定的。當任何具備導磁能力的鐵磁性物質擾動時,該區域的磁場強度將會發生變化。汽車可看作多個雙極性磁鐵組成的模型,當車輛進入地磁傳感器的檢測范圍時,車輛前端發動機和車輪以及車輛內部其它鐵磁性物體會對地磁場產生扭曲和畸變,從而擾動周圍地磁場的分布情況。
圖1說明了一輛小汽車擾動地球磁場的情況,不管它的狀態是運動的還是靜止的,由于車輛內部鐵磁性物質的存在,必定會影響原分布均勻的地磁場。當車輛處于地磁傳感器檢測范圍內時,地磁傳感器能夠靈敏感知到地磁信號的變化,經信號分析可以得到檢測目標的相關信息。
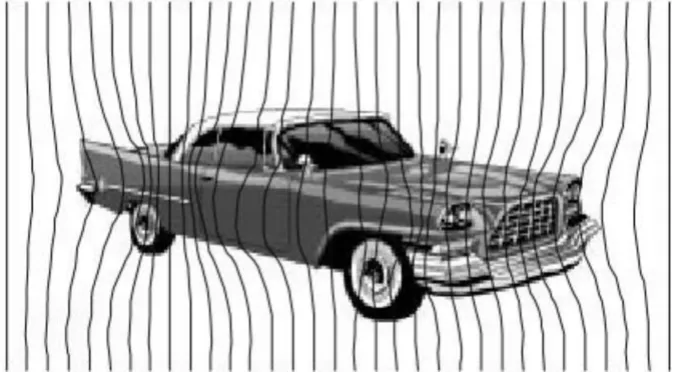
圖1 普通小汽車對車輛所在區域產生的磁場擾動示意圖
3 兩種常見地磁傳感器的性能特點
地磁傳感器可分為磁通門傳感器、電感式傳感器和磁阻式傳感器[9]。磁通門傳感器的體積較大[9~10],在車輛檢測中應用于交通參數獲取的案例尚未見到,此處不做贅述。
3.1 電感式傳感器
電感式傳感器的原理是利用電磁感應把被測環境磁場的變化轉換成線圈的自感系數和互感系數的變化,再用電路轉換為電壓值輸出,實現非電量到電量的轉換。電感式地磁傳感器應用較多的是美國PNI公司研發的RM3100套件,一般由兩個X/Y軸磁傳感器Sen-XY-f(13104)、1個Z軸磁傳感器Sen-Z-f(13101)和1個ASIC控制器MagI2C配套使用[11]。基于磁感應技術的PNI傳感器不僅具備超低噪音下的高分辨率和重復性數據輸出,而且采樣率高、無磁滯現象,也不需要進行溫度校準,測量范圍±11Oe,自帶SPI數字接口,在車輛檢測中廣泛應用于停車位占用/空閑狀態的判別。
3.2 磁阻式傳感器
磁阻式傳感器的原理是磁阻效應,即鐵、鈷、鎳等金屬或一些半導體在變化的磁場中,電阻值隨磁場變化的現象。磁阻式傳感器有各向異性磁阻傳感器(AMR)、巨磁電阻傳感器(GMR)、巨磁阻抗傳感器(GMI)、隧道磁阻傳感器(TMR)等。磁阻式地磁傳感器應用較多的是Honeywell公司出品的AMR各向異性磁阻傳感器,AMR傳感器的典型代表是HMC5983三軸磁阻傳感器[12],該傳感器具有軸向高靈敏度和線性高精度的特點,內置溫度校準,對于溫度變化的環境適應性較強;測量范圍±8Oe,自帶I2C/SPI數字接口,在車輛檢測中廣泛應用于車流量檢測和停車位占用/空閑狀態的判別[8~9]。
3.3 兩種常見地磁傳感器的性能特點比較
PNI公司的RM3100配合PNI12927驅動芯片構成的三軸電感式地磁傳感器,與Honeywell公司的HMC5983三軸磁阻式地磁傳感器相比,電感式地磁傳感器雖然測量范圍更大,但是抗噪聲性能弱,數據抖動頻繁且抖動幅度大;磁阻式地磁傳感器噪聲較少,且HMC5983內置溫度校準,對于溫度變化的環境適應性較強[9]。另外,磁阻式地磁傳感器的價格相對更低。綜合以上原因,本文選擇集成三軸磁阻傳感器HMC5983進行交通數據采集器的設計開發。
4 交通數據采集設備設計
4.1 設備組成及工作原理
交通數據采集設備組成及系統結構圖如圖2所示。交通數據采集設備由交通數據采集器、中繼器和網關組成。交通數據采集器用于實時檢測道路斷面車輛通過信息,并直接傳輸至網關。當交通數據采集器與網關的距離超過一定的范圍時,為了保證二者之間的可靠通訊,交通數據采集器也可經由中繼器轉發數據至網關。網關接收到交通數據采集器發送的車輛通過信息以后,對數據進行匯聚處理,得到被檢測道路斷面的交通數據,包括車流量、速度、時間占有率、有效車身長度等,然后通過有線(光纖以太網)或無線(4G)的方式實時傳輸至服務器端云平臺。
4.2 交通數據采集器電路設計
基于HMC5983的交通數據采集器電路包括地磁傳感器電路、無線通信電路、微控制器MCU和電源管理單元等,如圖2所示。
三軸磁阻式傳感器HMC5983實時采集交通數據采集器所在位置的磁場信息,并通過SPI數字接口將采集到的磁場信息發送至MCU,如圖3所示。
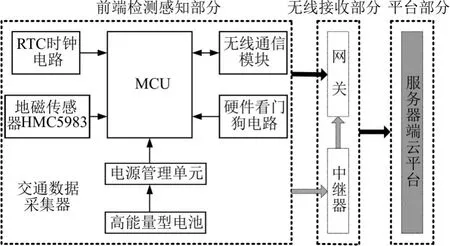
圖2 交通數據采集設備組成及系統結構圖
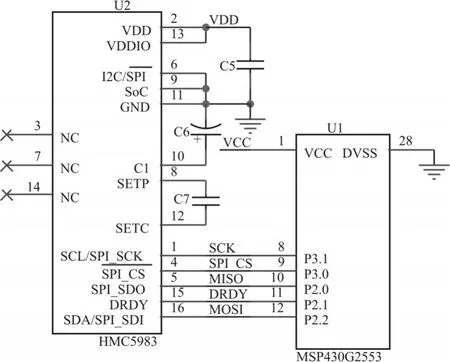
圖3 HMC5983通過SPI向MCU發送磁場信息數據
MCU微控制器選用TI超低功耗微控制器MSP430G2553[13]。MSP430G2553 具有一個強大的16位精簡指令集(RISC)CPU、16位寄存器和有助于獲得最大編碼效率的常數發生器,數字控制振蕩器(DCO)可在不到1 μs的時間里完成從低功耗模式至運行模式的喚醒。MCU微控制器根據磁場信息的變化來判別有無車輛經過,并通過電源管理單元控制各部分電路的工作。
無線通信模塊選用基于SX1278設計開發的安美通APC340模塊。APC340無線通信模塊基于LoRa擴頻調制技術進行遠距離的無線數據傳輸,支持420MHz~510MHz頻譜范圍內的可靠通信,覆蓋433MHz、470MHz、490MHz等免費頻段,體積小、功耗低,性能高,適合集成于交通數據采集器電路中。APC340模塊通過TTL串口與MCU進行連接,實時向網關發送車輛通過信息。
4.3 交通數據采集器嵌入式軟件設計
按照結構化程序設計的思想,將系統功能分解成各個可執行的最小功能模塊,每個可執行的最小模塊由一個封裝函數來完成,再通過主函數的調用,完成既定的系統功能。根據城市道路固定斷面交通數據采集器的功能要求,結合硬件電路結構,系統軟件主要實現以下功能:
1)實時采集交通數據采集器所在位置的磁場信息;
2)在對采集的磁場信息進行計算分析時,與當前設定的閾值比較,進而判別是否有車輛通過。如果采集到的磁場信息超過設定的閾值,表明有車輛通過;反之,表明無車輛通過。
3)當有車輛通過時,MCU控制無線通信模塊及時向網關無線發送當前車輛通過信息。
4)特別地,當交通數據采集器檢測到無車輛通過且持續時間超過設定的時間窗口閾值時,則自適應校正更新地磁檢測基準值,以抵消交通數據采集器周圍背景磁場的變化。
交通數據采集器主程序流程圖如圖4所示。整個程序可分為系統初始化程序、磁場信息采集程序、車輛通過判別程序、TTL串口通訊程序等。
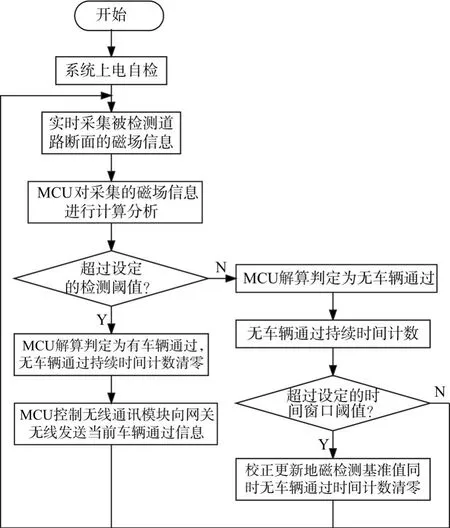
圖4 交通數據采集器主程序流程圖
4.4 網關設計
網關硬件電路包括供電電源單元、MCU綜合處理單元、無線通信電路和接口轉換電路等,其組成框圖如圖5所示。
網關可以安裝在路燈桿或監控設備安裝桿上,采用AC220V供電,具備以下功能:
1)無線接收交通數據采集器發送的車輛通過信息或設備狀態信息。
2)對數據進行匯聚處理,得到被檢測道路斷面的交通數據,包括車流量、速度、時間占有率、有效車身長度等。
3)通過有線(光纖以太網)或無線(4G)的方式實時傳輸數據至服務器端云平臺。
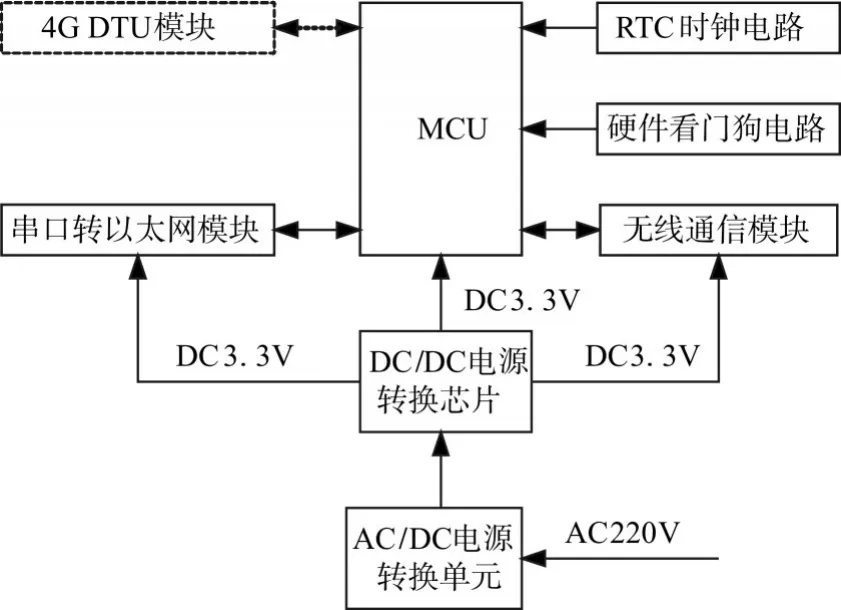
圖5 網關硬件電路組成框圖
中繼器實現的是無線數據轉發功能,與網關相比,無需接口轉換電路,即中繼器只需將接收到的車輛通過信息無線轉發至網關,此處不做進一步贅述。
5 測試結果
本次實裝測試環境位于某測試路段距離路口約100m處的道路斷面上,單向三車道安裝4個交通數據采集器,中間車道上安裝2個交通數據采集器,其他兩車道各安裝1個交通數據采集器,如圖6所示。所安裝的交通數據采集器用于采集道路斷面車輛通過信息,中間車道上安裝的2個交通數據采集器相距3m,用于獲取車輛通過時的平均速度。網關安裝于路燈桿上,通過光纖以太網向服務器端云平臺傳輸交通數據。經觀測統計與數據分析,車流量檢測精度高于96%,速度檢測精度高于80%,基本能夠滿足城市道路固定斷面交通數據采集的應用需求。
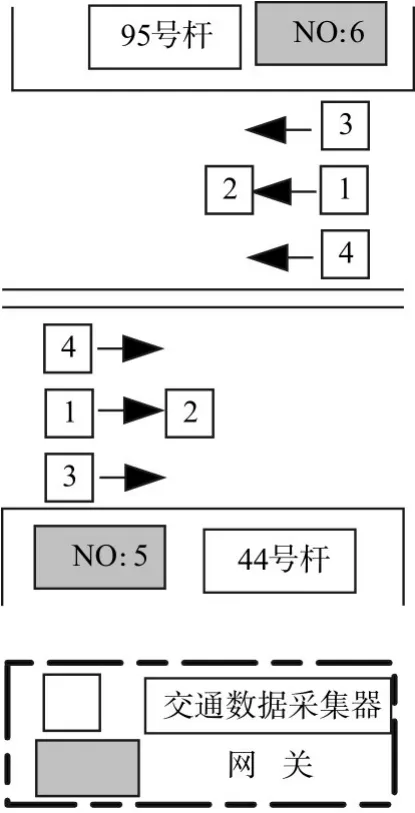
圖6 交通數據采集器及網關現場安裝布置示意圖
6 結語
當前,基于AMR磁阻傳感器的車輛檢測技術以其具有低成本、低功耗、小體積等特性而備受青睞,是現階段車輛檢測的研究重點[2]。本文基于三軸磁阻式傳感器HMC5983所設計的交通數據采集器體積小、安裝方便、維護簡單,基本能夠滿足城市道路固定斷面交通數據采集的實際應用需求。交通數據采集設備獲取的車流量、車速等基礎數據,對提升城市交通管理的科技水平和智能交通管理的建設發展具有重要的支撐意義。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42