TZJ24型裝載機工作裝置的作業工況構建與分析*
2018-07-27 06:14:58,,,
現代機械 2018年3期
,,,
(武漢科技大學城市學院 機電工程學部,湖北 武漢 430083)
0 引言
近年來,我國裝載機的產銷量居世界第一,但其性能仍然與世界水平有一定差距。運用虛擬樣機仿真指導產品設計研發,不僅可以降低費用和縮短開發周期,而且通過優化裝載機結構與性能參數,能在復雜惡劣的工作環境下穩定運行[1]。目前裝載機研究的焦點是對整機的機—電—液耦合仿真、動力學仿真分析和性能優化。某廠TZJ型裝載機是主要面向礦山和隧洞井巷中的地下礦石鏟裝、收集與輸送裝車作業的機械設備[2]。本文主要利用ADAMS不同分析模塊對其虛擬樣機進行運動學與動力學仿真分析,得到工作裝置的主要性能參數指標和工作臂鉸點受力情況,為工作機構優化設計提供重要依據,對于提高產品工作可靠性有重要參考價值。
1 ADAMS虛擬樣機的建立
1.1 三維模型的創建
裝載機主要包含行走裝置、挖掘裝置、輸送裝置三部分,在不改變主要部件材料、質量和慣性矩等條件下,對行走裝置和輸送裝置進行必要的簡化。利用SolidWorks創建主要零部件三維模型,遵循自底向上原則創建三維裝配體。
1.2 多體虛擬樣機仿真模型
為了得到其主要工作性能參數以及分析各鉸接點受力情況,有必要建立其虛擬樣機并進行運動學及動力學仿真分析。在ADAMS中導入模型的Parasolid格式文件,此時只保留了各零部件的位置信息,需重新定義裝配關系。
1.3 添加約束和驅動

圖1 TZJ型裝載機虛擬樣機仿真模型
由布爾運算定義零部件間裝配關系,通過重命名和顏色屬性修改區分零部件。ADAMS處理4種約束:運動副約束、接觸約束、運動約束和指定約束。依據工作原理,在大臂油缸、小臂油缸以及鏟斗油缸處添加3個移動副,臂支撐及機座添加1個固定副,各構件鉸接處添加12個旋轉副。去除冗余約束,系統自由度為3,等于驅動液壓缸數,故運動唯一。TZJ型裝載機虛擬樣機模型如圖1。
2 工作裝置的運動學仿真分析
裝載機典型作業方式有順序動作方式和復合動作方式。順序動作方式指的是三個液壓缸依次單獨交替提供動力完成工作;復合動作方式是在各個液壓缸的協同配合下完成鏟裝。裝載機性能參數指標主要包含挖掘深度、挖掘半徑、傾卸高度、傾卸距離等[3]。采用順序動作方式,分別對三個液壓缸添加step驅動函數,各油缸驅動函數表達式如表1。

表1 工作裝置順序動作驅動函數

圖2 鏟斗齒尖軌跡圖
在鏟斗齒尖處創建MARKER點追蹤齒尖軌跡,該型號裝載機在順序工作方式下的工作軌跡如圖2,齒尖X方向位移、Y方向位移曲線以及挖掘半徑曲線如圖3。
曲線MEA_displacement_x的幅值為max=2514.286 mm,min=-418.871 mm,即最大傾卸距離為2514.286 mm;曲線MEA_displacement_y的幅值為max=1639.873 mm,min=-310.955 mm,即最大傾卸高度為1639.873 mm,最大挖掘深度為310.955 mm;曲線MEA_magnitude_radius的幅值為max=2404.659 mm,min=623.256 mm,即最大挖掘半徑為2404.659 mm。以上工作性能參數歸總如表2。

圖3 齒尖軌跡位移值

表2 工作性能參數仿真結果
3 作業工況構建與動力學分析
3.1 典型工況載荷分析
裝載機工作裝置在一般作業下以復合動作為主,各個液壓缸協同工作完成降臂、扒礦、挖礦、提升等一系列動作。不計土壤阻力和摩擦力,小臂液壓缸挖礦時外載荷分為切向切削阻力Wt和法向切削阻力Wn,鏟斗液壓缸挖礦和裝礦過程主要受切向切削阻力Fmax和物料重力G影響,其經驗公式分別如下[4-5]:
(1)
式中:K0——切削比阻力,N/cm2,V級土壤K0=28 N/cm2;b——切削寬度,cm,約為斗齒寬度b=4 cm;h——切削深度,cm,由仿真結果取h=136 cm;ψ——切削阻力系數,一般取20%~62%,取ψ=42%。
求得切向切削阻力Wt=15250 N,法向切削阻力Wn=6400 N。
(2)
式中:φmax為切削過程鏟斗總轉角一半,φmax=23°;C為土壤硬度系數,松散礦石取C=150;R為切削半徑,由仿真結果取R=0.6796 m;D為切削刃擠壓力,斗容q=0.2 m3時取D=8000 N;ρ為土壤密度,礦石堆密度取ρ=1.8×104kg/m3;V為斗容,由虛擬樣機模型得V=0.2 m3;g為重力加速度,取g=9.8 N/kg。
求得切向切削阻力Fmax=7998 N,物料重力G=35300 N。
3.2 作業工況構建
在齒尖處添加切削阻力,在鏟斗質心添加礦料重力,作業工況載荷及油缸驅動函數設置如表3。
4 仿真結果后處理及分析
設置仿真時間為15s,仿真步數為500進行仿真。利用Measure模塊得到鉸點約束反力和驅動油缸受力曲線圖,通過ADAMS/PostProcessor模塊將相關仿真分析結果曲線圖繪制在同一坐標曲線圖上,對照仿真動畫進行圖解分析,驗證模型與實際的貼近性。工作裝置鉸點示意如圖4。

表3 典型作業工況載荷及復合動作驅動函數

圖4 各鉸點示意圖
由圖5(a)可得,在臂支撐與大臂鉸接點B處約束反力最大。由圖5(b)可得,在小臂與小臂油缸鉸接點F處約束反力最大,在小臂與連桿運動片鉸接點G和小臂與鏟斗鉸接點H均產生較大約束反力,在工作過程中易產生疲勞斷裂,因此在設計過程中應充分考慮其強度和剛度。
由圖6可得,大臂液壓缸受力最大,鏟斗液壓缸受力最小,因此在液壓缸選擇過程中,遵循大臂液壓缸內徑最大和小臂液壓缸內徑最小原則選擇滿足峰值要求的型號。
由圖7、圖8、圖9得,0~5s為開機展臂過程,由于系統振動影響,使各曲線均有微小波動。5s~9s,由于切削阻力作用下各鉸點約束反力逐步增大,其中鉸點B、D幅度較大,相應大臂小臂液壓缸缸受力曲線達小波峰,為小臂扒礦過程。9s~12s,隨礦料重力的增大,鉸點D曲線達最大波峰,鉸點H曲線達波峰,但鉸接點D曲線立刻下降而鉸接點H曲線平穩,結合圖6鏟斗液壓缸峰值,此時以鏟斗挖礦過程為主。12s~14s,在扒挖結束后,大臂油缸提供提升動力,故鉸接點B出現第二個波峰且圖8中大臂油缸受力達峰值,小臂油缸提供卸載動力故鉸接點D出現第三個波峰。14s~15s,各曲線驟降,為卸載過程。曲線符合實際情況,該裝載機虛擬樣機可行。

圖5 大臂與小臂鉸接點約束反力曲線
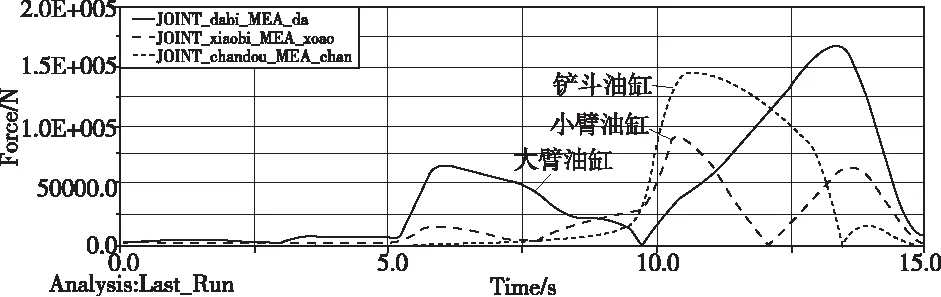
圖6 各液壓缸受力分析曲線

5 結論
以TZJ24型裝載機為研究對象進行運動學及動力學分析,得結論如下:通過在順序動作下的運動學仿真,校驗了工作裝置工作無干涉,追蹤鏟斗齒尖運動軌跡得到其主要工作性能參數;通過添加作業終端載荷對樣機作復合動作下的動力學仿真分析,得大臂與臂支撐的鉸點B、小臂與鏟斗液壓缸的鉸點F易產生疲勞斷裂,設計時需充分考慮其剛度和強度;基于驅動液壓缸受力曲線,為其型號的設計選擇提供依據,結合各曲線檢驗了樣機與實際的貼近性,為產品的優化設計提供依據。
基金項目:基于YSZ和雙鈣鈦礦敏感電極的混合電勢型車載NOx傳感器的研究(B2016436)。