大型無人潛水器吊具的設計與試驗驗證
2018-07-25 06:40:40付佳杰
機械制造 2018年3期
□付佳杰
中國船舶重工集團公司第七一〇研究所 湖北宜昌 443003
1 研究背景
目前,海洋仍有未被人類充分認識和利用的空間。隨著陸地資源的減少,人類生存對海洋的依賴度空前增長。無人潛水器作為認識和開發海洋不可或缺的有效工具,近年來得到快速發展。一直以來,布放回收技術是無人潛水器廣泛應用的瓶頸,研制安全、可靠、有效的自動或半自動布放回收裝置是重要課題[1-2]。當前,無人潛水器典型布放回收系統主要包括單臂收放系統[3]、門形架收放系統[4]、集成式收放系統[5]、船舯月池式收放系統[6]、滑道式收放系統[7]、潛艇布放回收系統[8-9]等。這些布放回收系統通常較復雜,大多需要母船支持,適用于水面母船布放回收中小型無人潛水器。大型無人潛水器由于噸位和體積大,在母船上布放回收難度較大。筆者針對大型無人潛水器岸基布放的特點,設計了一種專用吊具,并進行了試驗驗證。
2 設計要求
所設計的吊具適用于大型無人潛水器岸基布放和回收,額定起吊質量20 t。吊具掛鉤與脫鉤在岸上操作,不需要人員下水操作或由小艇靠近無人潛水器輔助操作。
吊具具有適應無人潛水器質心軸向變化的調節能力。如圖1所示,利用無人潛水器中部凸起的兩個起吊環作為吊具的起吊接口。無人潛水器是由成百上千個零部件組成的一個復雜系統,考慮加工制造誤差,無人潛水器組裝完成后的質心相對于初始設計的質心會有一定偏離。另外,無人潛水器配置不同的模塊化載荷時,質心也會有一定變化。基于以上原因,要求無人潛水器質心在中點左右各偏離300mm區間內時,吊具均能平衡起吊。

▲圖1 無人潛水器吊具接口
3 結構組成
大型無人潛水器吊具由吊環、鏈輪及支架、導鏈結構、鋼鏈、主梁框架、鎖鉤等部分組成,如圖2所示。
吊環主要與起重設備的吊鉤連接,設計時要保證吊環內孔的尺寸大于對應的起重設備吊鉤的尺寸,使起重設備的吊鉤能夠輕松穿過吊具吊環。鏈輪及支架在導鏈結構的作用下,可以根據無人潛水器質心的變化在鋼鏈上自由滑動,以適應無人潛水器不同的質心位置。主梁框架下部設有喇叭形導向裝置,其內部形狀與無人潛水器中部吊環外形一致,可引導吊具鎖鉤與無人潛水器中部吊環快速定位對接。

▲圖2 無人潛水器吊具結構
在主梁框架的兩端設有一對鎖鉤,可通過岸上人員拉動繩索來控制鎖鉤的閉鎖和開鎖,鎖鉤狀態如圖3所示。閉鎖后,岸上人員可通過拉動繩索來控制擋銷的位置,限制鎖鉤保持閉鎖狀態,保證無人潛水器布放回收時不會因為晃動而脫鉤。
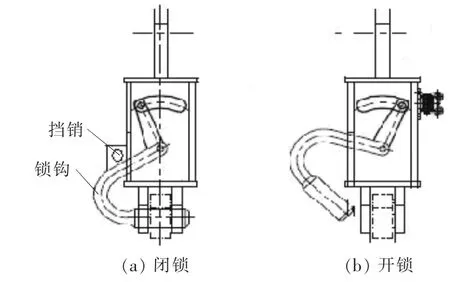
▲圖3 鎖鉤狀態
4 工作原理
回收過程指將無人潛水器從水面吊裝至岸上。由于無人潛水器在水上,人不方便靠近,因此回收過程通常比布放過程復雜。
回收前,無人潛水器漂浮在靠近岸邊水面上,通常岸上保障人員可用撐桿和鉤桿適當調整無人潛水器姿態,防止無人潛水器碰撞岸邊或船體。用吊具回收無人潛水器時,需要確認吊具鎖鉤應處于閉鎖狀態。吊具整體狀態如圖4所示。啟動吊車,移動吊具至無人潛水器吊環正上方,向下移動。當吊具接近無人潛水器時,站在岸上的人員拉動與擋銷連接的繩索2,克服擋銷內部的彈簧彈力后即可打開擋銷。此時,鎖鉤閉鎖限位被解除,再拉動繩索1即可打開鎖鉤。控制吊車使吊具下行,導向裝置與無人潛水器吊環定位對接后,松開繩索1,吊具鎖鉤掛住無人潛水器吊環,然后松開繩索2,擋銷在彈簧恢復力作用下彈出,將鎖鉤位置鎖定。此時,吊具已進入吊重工作狀態。控制吊車起吊無人潛水器離開水面,并移動至擱置架上,吊具鎖鉤不受無人潛水器重力作用,拉動繩索2,解除擋銷限位,再拉動繩索1即可打開鎖鉤,實現吊具與無人潛水器的分離。至此,無人潛水器回收完成。

▲圖4 吊具整體狀態
布放過程是回收過程的逆過程,相對而言較簡單。需要說明的是,將無人潛水器布放至水面后,需要利用浮力作用,消除或減小無人潛水器重力對吊具鎖鉤的影響。此時,擋銷受到的鎖鉤擠壓力也較小,可以輕松地拉開擋銷,再拉動繩索1,即可打開鎖鉤,實現吊具與無人潛水器的分離,完成無人潛水器布放。
5 試驗驗證
大型無人潛水器吊具加工調試完成后,需要通過承載試驗來驗證吊具的承載能力,以確保吊具在正常使用時可靠安全。吊具承載試驗借鑒集裝箱吊具標準靜載試驗和動載試驗的規定進行[10]。
5.1 掛鉤脫鉤方便性驗證
吊具在承載試驗驗證前,用真實無人潛水器產品做試驗有一定風險,因此為了比較真實地反映無人潛水器實際起吊過程,制作了一件吊具配重接口。這一接口上部兩個吊環的外形尺寸和間距與無人潛水器產品完全一致,在吊具配重接口兩端分別設置一個圓形孔,用于連接鋼絲繩掛配重。通過手拉繩索2和繩索1,驗證吊具與吊具配重接口間的掛鉤和脫鉤均比較順利[11]。
5.2 吊具承載能力驗證
起吊25 t(1.25倍額定載荷)的均布載荷,離開承載面100 mm,確認安全后,再起吊28 t(1.4倍額定載荷)的均布載荷,離開承載面100 mm,懸吊10 min,然后緩慢放下,目測觀察所有零件、部件、構件均無永久性變形,滿足20 t的額定載荷承載能力要求,并有不小于1.4倍的安全因數。
5.3 吊具質心調節及動態承載能力驗證
如圖5所示,吊具配重接口質量為0.29 t,吊架組件質量為 17.5 t,重塊1質量為 4.65 t,重塊2質量為2.56 t,則總質量為25 t。將重塊1和重塊2偏離吊架質心一段距離,使吊具下重物的質心偏離中心達到300 mm。起吊25 t偏心載荷三次,保持10 min,待吊具穩定后,啟動吊車縱向、橫向快速擺動,完成驗證后將重物緩慢放下。
吊具質心調節能力及動態承載能力驗證實物如圖6所示,觀察整個過程發現,吊具鏈輪在鋼鏈上能夠自動調節,吊具和重物基本保持水平,各零部件無永久性變形,滿足無人潛水器質心在中點左右各偏離300 mm區間內均能平衡起吊的要求。
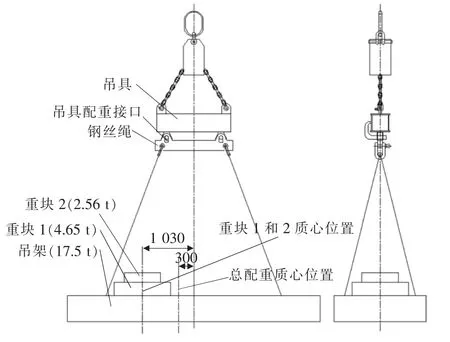
▲圖5 吊具質心調節及動態承載能力驗證
6 結束語
筆者設計的大型無人潛水器吊具,可根據被吊裝無人潛水器質心變化而自適應調節,通過試驗驗證了無人潛水器質心在左右300 mm范圍內變化時,吊具均可以安全平穩起吊,適用于大型無人潛水器的岸基布放與回收,且掛鉤與脫鉤操作不需要人員下水或由小船靠近操作,使用維護方便,具有一定的工程應用價值。

▲圖6 吊具質心調節及動態承載能力驗證實物
