并鏈?zhǔn)椒峭暾麢C(jī)械臂機(jī)構(gòu)設(shè)計(jì)及運(yùn)動(dòng)規(guī)劃
2018-07-19 07:33:28冷麗姣譚躍剛錢冠杰
機(jī)械設(shè)計(jì)與制造 2018年7期
冷麗姣,譚躍剛,李 亮,錢冠杰
(1.武漢理工大學(xué) 機(jī)電學(xué)院,湖北 武漢 430070;2.寶雞文理學(xué)院 機(jī)械工程學(xué)院,陜西 寶雞 721007)
1 引言
在分析力學(xué)中,非完整系統(tǒng)是指其約束方程中包含有坐標(biāo)對(duì)時(shí)間的導(dǎo)數(shù)的系統(tǒng),即其約束限制系統(tǒng)的速度或加速度[1]。這類非完整機(jī)械系統(tǒng)的自由度數(shù)目少于其位形空間維數(shù),表現(xiàn)出欠驅(qū)動(dòng)特性,因此可用較少的控制輸入來確定其在較多空間維數(shù)的位形空間內(nèi)的運(yùn)動(dòng)。驅(qū)動(dòng)裝置的減少有利于設(shè)計(jì)出結(jié)構(gòu)更緊湊,重量更輕的多關(guān)節(jié)機(jī)械臂,因此非完整機(jī)械臂的研究對(duì)開發(fā)輕小型機(jī)器人、醫(yī)療機(jī)器人、多指靈巧手等有重要的實(shí)際意義。
典型的非完整機(jī)器人系統(tǒng)有輪式移動(dòng)機(jī)器人、宇宙機(jī)器人、體操機(jī)器人、水下機(jī)器人等,這些機(jī)器人系統(tǒng)具有的非完整性和非線性,確定了其運(yùn)動(dòng)控制的特點(diǎn)。現(xiàn)有的非完整機(jī)械系統(tǒng)研究主要集中于非完整力學(xué)以及對(duì)現(xiàn)有的非完整系統(tǒng)的路徑規(guī)劃和控制,對(duì)新型非完整機(jī)器人系統(tǒng)的設(shè)計(jì)與開發(fā)在國內(nèi)外較為少見。
河村隆基于動(dòng)物貓?jiān)诳罩邢侣溥^程的運(yùn)動(dòng)特性分析,提出了一種具有非完整約束性的機(jī)器貓[2],因其模型在空中下落過程中可以保持角動(dòng)量守恒,從而使得機(jī)器貓具有非完整特性。文獻(xiàn)[3]利用摩擦球矢量分解合成機(jī)構(gòu)開發(fā)了一類二維空間內(nèi)的非完整機(jī)器人,這種機(jī)器人模型可以轉(zhuǎn)換成鏈?zhǔn)浇Y(jié)構(gòu),從而利用鏈?zhǔn)较到y(tǒng)的運(yùn)動(dòng)控制方法實(shí)現(xiàn)對(duì)其運(yùn)動(dòng)控制。文獻(xiàn)[4-5]中提出了移動(dòng)機(jī)器人路徑規(guī)劃局部最小問題的解決方案;文獻(xiàn)[6]中給出了一種RRT(快速搜索隨機(jī)數(shù)算)方法用于解決移動(dòng)機(jī)器人的路徑規(guī)劃問題,并引入目標(biāo)偏向的思想,克服了以往RRT計(jì)算代價(jià)較高的問題。
這里是采用摩擦圓盤運(yùn)動(dòng)合成分解機(jī)構(gòu)作為關(guān)節(jié)傳動(dòng)部件,并采用雙萬向節(jié)以并鏈方式為各個(gè)關(guān)節(jié)傳遞運(yùn)動(dòng),提出了一種僅由兩個(gè)控制電機(jī)驅(qū)動(dòng)的并鏈?zhǔn)剿年P(guān)節(jié)非完整機(jī)械臂。該系統(tǒng)結(jié)構(gòu)簡單緊湊,并表現(xiàn)出非完整約束性,為多關(guān)節(jié)機(jī)械臂的驅(qū)動(dòng)單元數(shù)與手臂質(zhì)量相沖突的問題提供了有效的解決方案。通過對(duì)其運(yùn)動(dòng)學(xué)分析和模型的鏈?zhǔn)阶儞Q,給出了非完整性和可控性的證明。在鏈?zhǔn)娇臻g運(yùn)用多項(xiàng)式輸入法對(duì)其進(jìn)行運(yùn)動(dòng)規(guī)劃,得到一條可行路徑軌跡,再通過鏈?zhǔn)侥孀儞Q將軌跡映射回關(guān)節(jié)空間,完成關(guān)節(jié)空間內(nèi)從初始位形至目標(biāo)位形的運(yùn)動(dòng)控制。
2 并鏈?zhǔn)椒峭暾麢C(jī)械臂機(jī)構(gòu)
2.1 摩擦圓盤運(yùn)動(dòng)原理
在下圖1(a)中,當(dāng)半徑為r的摩擦輪繞I軸以角速度wi轉(zhuǎn)動(dòng)時(shí),摩擦輪與轉(zhuǎn)盤之間只有純滾動(dòng),則轉(zhuǎn)盤將以一定的角速度wo繞O軸轉(zhuǎn)動(dòng)。摩擦輪與轉(zhuǎn)盤相互垂直,在此前提下,摩擦輪還可以繞自身軸心與兩者接觸點(diǎn)M的連線作相對(duì)于摩擦盤的旋轉(zhuǎn)。當(dāng)旋轉(zhuǎn)過夾角α?xí)r,兩者在接觸點(diǎn)M處的線速度矢量圖,如圖 1(b)所示。
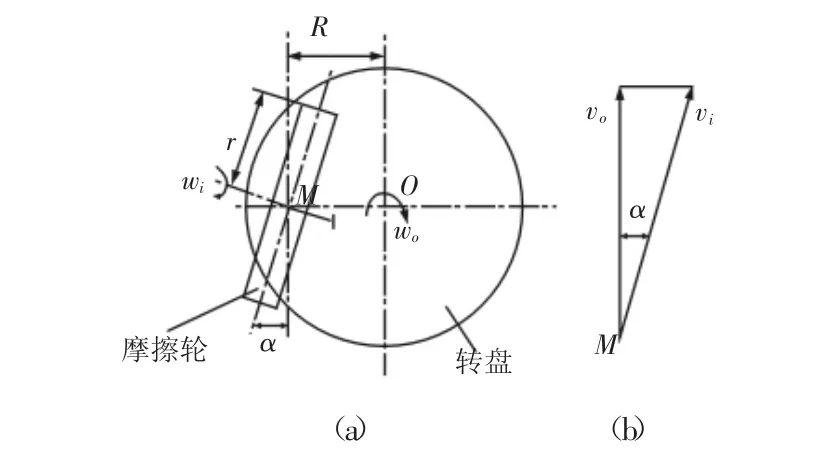
圖1 摩擦圓盤運(yùn)動(dòng)合成分解機(jī)構(gòu)Fig.1 Friction Aisc Movement Decomposition Mechanism
則存在下面的關(guān)系式:

可得:

式中:R—摩擦輪與轉(zhuǎn)盤的接觸線M到轉(zhuǎn)盤中心的距離;vi—摩擦輪在接觸點(diǎn)處的線速度;vo—轉(zhuǎn)盤在接觸點(diǎn)處的線速度。
從關(guān)系式(1)可以看出,摩擦輪與轉(zhuǎn)盤之間的傳動(dòng)比可以通過調(diào)節(jié)α夾角來調(diào)整,因此定義夾角α為傳動(dòng)偏角。
摩擦輪在轉(zhuǎn)盤上因滾動(dòng)產(chǎn)生的相對(duì)運(yùn)動(dòng)是由相對(duì)位形變化而確定的,依據(jù)這種相對(duì)位形可變的兩摩擦圓盤,設(shè)計(jì)的摩擦圓盤運(yùn)動(dòng)合成分解機(jī)構(gòu)具有非完整約束特性[7]。
2.2 并鏈?zhǔn)椒峭暾麢C(jī)械臂機(jī)構(gòu)設(shè)計(jì)
在機(jī)械臂的每個(gè)關(guān)節(jié)處設(shè)置一組摩擦圓盤機(jī)構(gòu),其中,摩擦輪與前一關(guān)節(jié)固連,轉(zhuǎn)盤與后一關(guān)節(jié)固連,當(dāng)關(guān)節(jié)角變化時(shí),也就是摩擦輪與轉(zhuǎn)盤之間的夾角變化,兩者的傳動(dòng)比也隨之變化。建立的并鏈?zhǔn)剿年P(guān)節(jié)機(jī)械臂機(jī)構(gòu)模型圖,如圖2所示。

圖2 并鏈?zhǔn)剿年P(guān)節(jié)機(jī)械臂機(jī)構(gòu)Fig.2 Structure of Double-Chain Four Joints Manipulator
電機(jī)2的轉(zhuǎn)動(dòng)直接驅(qū)動(dòng)關(guān)節(jié)1繞軸線轉(zhuǎn)過角度θ1,由于摩擦輪1通過側(cè)板與機(jī)架固定,而轉(zhuǎn)盤1固定在第一關(guān)節(jié),所以電機(jī)2就控制了關(guān)節(jié)1的轉(zhuǎn)角θ1,并且相當(dāng)于在摩擦輪與轉(zhuǎn)盤的摩擦傳動(dòng)中加入了一個(gè)θ1的傳動(dòng)偏角。電機(jī)1一方面通過齒輪來驅(qū)動(dòng)摩擦輪,摩擦輪因滾動(dòng)摩擦帶動(dòng)轉(zhuǎn)盤轉(zhuǎn)動(dòng),轉(zhuǎn)盤經(jīng)同步帶帶動(dòng)關(guān)節(jié)2轉(zhuǎn)動(dòng)角度θ2,與此同時(shí)在關(guān)節(jié)2處的摩擦輪與轉(zhuǎn)盤之間加入一個(gè)θ2的傳動(dòng)偏角;另一方面通過雙萬向節(jié)將能量傳遞到后面的關(guān)節(jié),后面的關(guān)節(jié)傳動(dòng)依次類推。因此實(shí)現(xiàn)了兩個(gè)電機(jī)驅(qū)動(dòng)四個(gè)關(guān)節(jié)的目的。并鏈?zhǔn)綑C(jī)械臂的運(yùn)動(dòng)示意圖,如圖3所示。
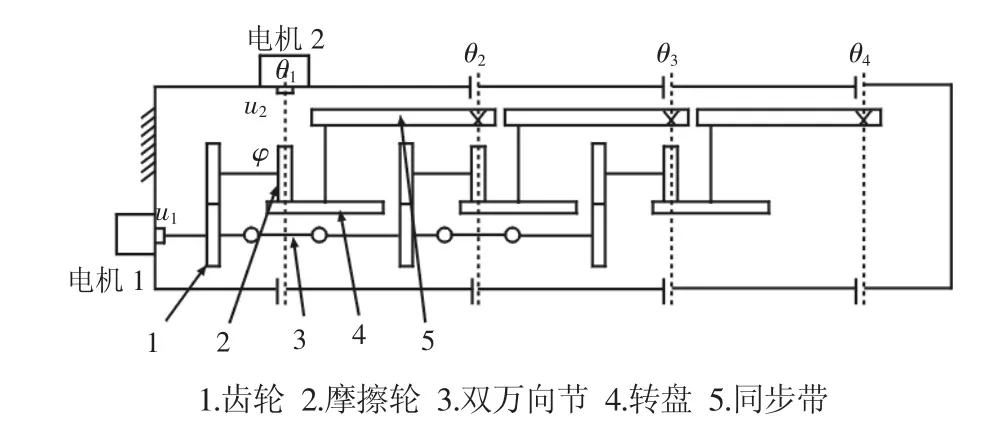
圖3 并鏈?zhǔn)剿年P(guān)節(jié)非完整機(jī)械臂傳動(dòng)示意圖Fig.3 Transmission Sketch of Double-Chain Four Joints Manipulator
在并鏈?zhǔn)綑C(jī)械臂機(jī)構(gòu)的設(shè)計(jì)中,以下幾個(gè)問題值得注意:
(1)摩擦輪與轉(zhuǎn)盤之間應(yīng)具有足夠的摩擦力,否則就不能有效、可靠、準(zhǔn)確地進(jìn)行運(yùn)動(dòng)傳遞。可以通過選用摩擦系數(shù)大的材料和適當(dāng)增加接觸處的正壓力來保證足夠的摩擦力。
(2)保證摩擦輪與轉(zhuǎn)盤的接觸點(diǎn)位于關(guān)節(jié)軸線上,如圖4(a)所示。若沒有達(dá)到位置要求,當(dāng)關(guān)節(jié)轉(zhuǎn)動(dòng)一定角度時(shí),摩擦輪就會(huì)在轉(zhuǎn)盤上產(chǎn)生滑動(dòng),導(dǎo)致摩擦輪與轉(zhuǎn)盤的接觸點(diǎn)到轉(zhuǎn)盤中心的距離發(fā)生變化,也就是式(1)中的R值變化,這樣不僅會(huì)影響正常的傳動(dòng),也使得傳動(dòng)比無法計(jì)算。解決方法是在提高零件加工精度的同時(shí)提高其安裝精度。
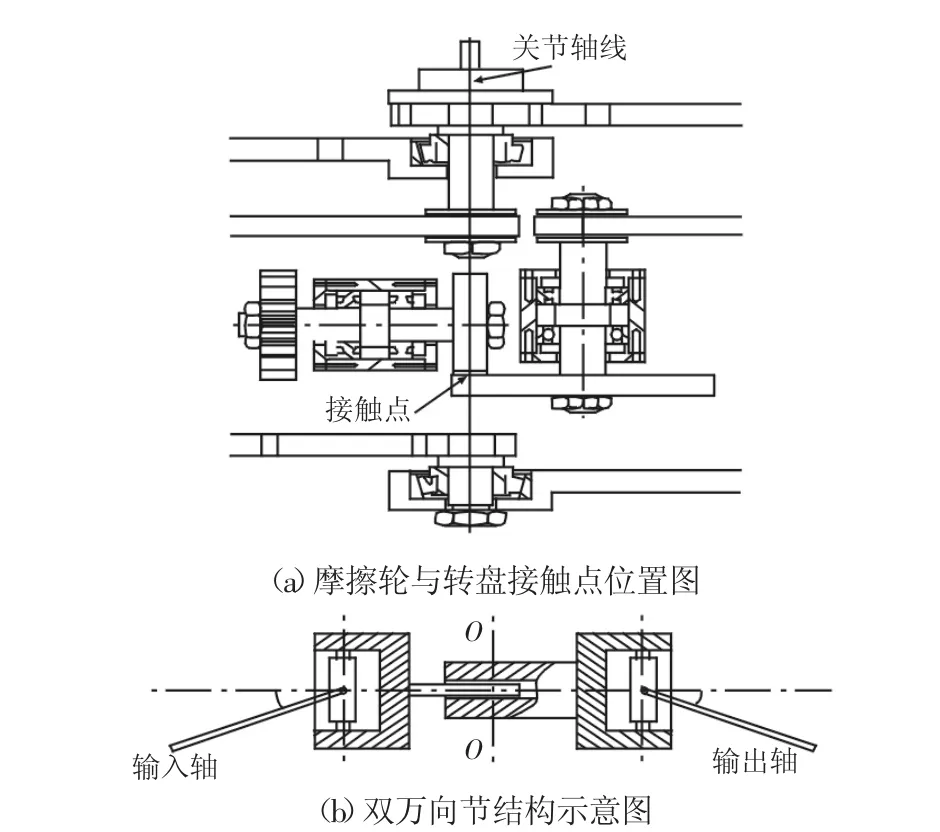
圖4 摩擦輪與轉(zhuǎn)盤接觸點(diǎn)位置、雙萬向節(jié)結(jié)構(gòu)示意圖Fit.4 The Position of Contact Point of Friction Wheel and Rotary Table and the Diagram of Double Universal Joint
(3)雙萬向節(jié)的輸入軸應(yīng)與輸出軸具有相等的轉(zhuǎn)動(dòng)角速度,即要求雙萬向節(jié)的中心線OO應(yīng)與關(guān)節(jié)軸線一致,并且為補(bǔ)償由于機(jī)械臂關(guān)節(jié)的轉(zhuǎn)動(dòng)所帶來的輸入軸與輸出軸之間的軸向距離變化,中間軸應(yīng)做成可伸縮的形式,如圖4(b)所示。
(4)為保證結(jié)構(gòu)的緊湊性、輕量化,在滿足強(qiáng)度、剛度要求下,連桿外圍采用大圓角和中心部位挖槽處理。在水平方向上,雙萬向節(jié)組成的能量主傳遞鏈,和摩擦輪、轉(zhuǎn)盤組成的運(yùn)動(dòng)傳動(dòng)鏈距離機(jī)械臂邊沿距離大致相等,且約等于兩傳動(dòng)鏈之間的間距,以及連桿上下對(duì)稱布置,使得機(jī)械臂的質(zhì)心接近其幾何中心,有利于提高其運(yùn)動(dòng)性能。
3 運(yùn)動(dòng)學(xué)特性分析及鏈?zhǔn)阶儞Q
3.1 運(yùn)動(dòng)學(xué)建模
四關(guān)節(jié)非完整機(jī)械臂的位形空間由關(guān)節(jié)轉(zhuǎn)角θi(i=1,2,3,4)和摩擦輪的角位移φ確定,故定義系統(tǒng)的廣義坐標(biāo)矢量為q=[q1,q2,q3,q4,q5]=[φ,θ1,θ2,θ3,θ4],而控制輸入僅有兩個(gè)電機(jī)的角速度u1和u2,說明機(jī)械臂系統(tǒng)可以由兩個(gè)控制輸入來控制在較多維數(shù)的位形空間內(nèi)運(yùn)動(dòng)。根據(jù)運(yùn)動(dòng)關(guān)系可以推導(dǎo)出并鏈?zhǔn)剿年P(guān)節(jié)機(jī)械臂的運(yùn)動(dòng)學(xué)模型:
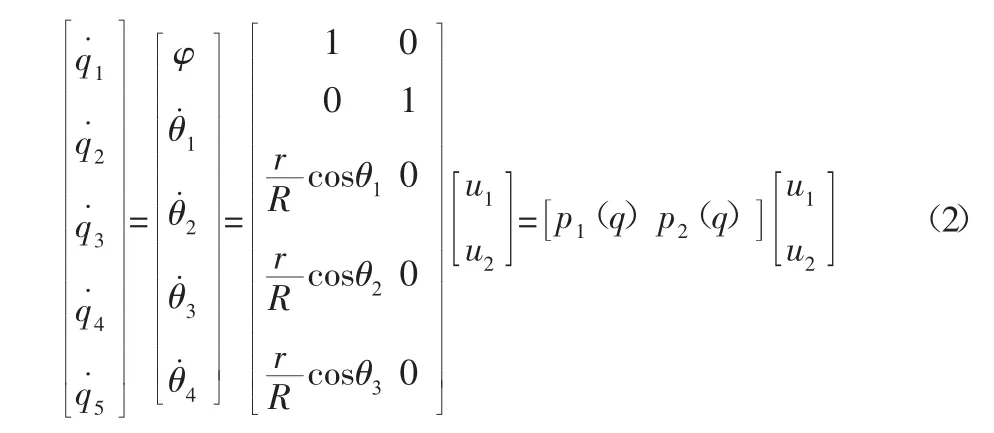
式中:r—摩擦輪半徑值,R與上文定義相同。
3.2 可控性分析
式(2)是無漂移的控制系統(tǒng)形式,此類無漂移仿射系統(tǒng)的可達(dá)空間是由分布 Δ(q)=span{p1,p2}張成的,根據(jù)系統(tǒng)的可控性條件,如果無漂移仿射系統(tǒng)的可達(dá)分布 Δp(q)=span{p1,p2,[p1,p],[p,[p,p]],…}滿秩,則該系統(tǒng)是可控的[3]。
2112
式中:[p1,p2]—對(duì)向量 p1,p2的李括號(hào)運(yùn)算;[p1,[p1,p2]]—對(duì)向量 p1,[p1,p2]的李括號(hào)運(yùn)算。即有
則并鏈?zhǔn)椒峭暾年P(guān)節(jié)機(jī)械臂的可達(dá)空間可表示為:=Δp(q)=span{p1,p2,[p1,p2],[p1,[p1,p2]],
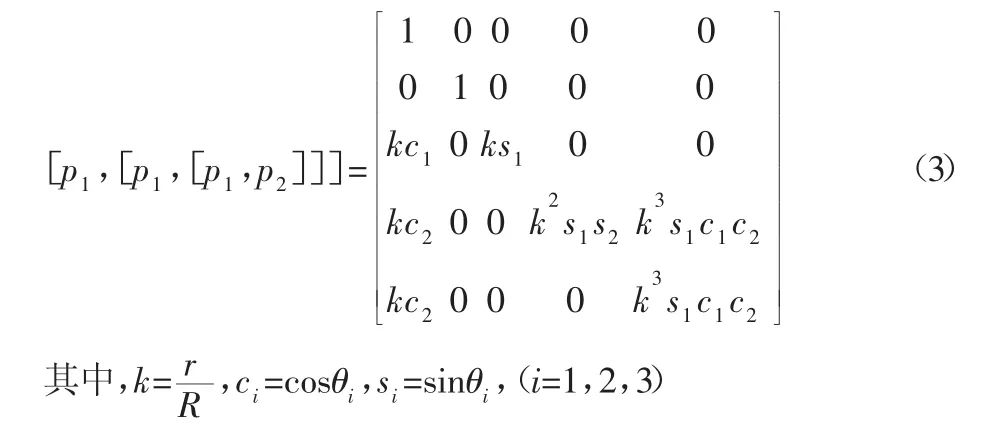
從式(3)可以看出,當(dāng) sinθ1≠0,sinθ2≠0,且 sinθ3≠0 時(shí),即θi≠0(i=1,2,3),則有 dimΔp(q)=5,此時(shí)矩陣的秩與位形空間維數(shù)相等,滿足可控秩條件。也就是說當(dāng)并鏈?zhǔn)剿年P(guān)節(jié)機(jī)械臂的工作空間滿足θi≠0(i=1,2,3)時(shí),該系統(tǒng)在五維可達(dá)位形空間內(nèi)具有非完整特性,并且是可控的,可以通過兩個(gè)電機(jī)來控制其五個(gè)位形變量的運(yùn)動(dòng)。
3.3 鏈?zhǔn)阶儞Q特性分析
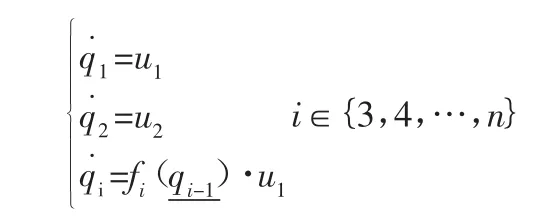
S?rdalen在研究具有n個(gè)拖掛車的輪式移動(dòng)機(jī)器人系統(tǒng)時(shí),給出了具有三角形構(gòu)造的無漂移仿射系統(tǒng)鏈?zhǔn)阶儞Q的條件和方法[8],即:對(duì)于類似于(2)式的無漂移仿射系統(tǒng):
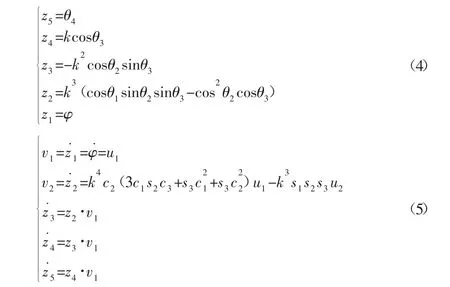
若在q0的鄰域內(nèi),光滑函數(shù)?i∈{3,4,…,n},則存在微分同胚的坐標(biāo)變換式和輸入變換式,使得該系統(tǒng)可以變換為鏈?zhǔn)较到y(tǒng)。由此可知,對(duì)于該四關(guān)節(jié)非完整機(jī)械臂運(yùn)動(dòng)模型式(2),當(dāng) θ(ii=1,2,3)≠0時(shí),能夠變換成鏈?zhǔn)浇Y(jié)構(gòu)的坐標(biāo)變換式(4)和輸入變換式(5):
4 并鏈?zhǔn)剿年P(guān)節(jié)非完整機(jī)械臂的運(yùn)動(dòng)規(guī)劃
基于鏈?zhǔn)阶儞Q方法的運(yùn)動(dòng)規(guī)劃基本思路是:將系統(tǒng)的初始位形qi和目標(biāo)位形qf映射成鏈?zhǔn)娇臻g的初始位形zi和目標(biāo)位形zf,在鏈?zhǔn)娇臻g規(guī)劃出一條從初始位形zi到目標(biāo)位形zf的路徑,再將規(guī)劃所得的路徑通過鏈?zhǔn)侥孀儞Q到關(guān)節(jié)空間。目前針對(duì)鏈?zhǔn)较到y(tǒng)的運(yùn)動(dòng)規(guī)劃方法較為成熟的有:分段常數(shù)輸入法、三角函數(shù)輸入法、多項(xiàng)式輸入法,相比于其它控制方法,多項(xiàng)式輸入法具有積分運(yùn)算簡單,且能控制各變量沿光滑的軌跡運(yùn)動(dòng)至目標(biāo)位形的優(yōu)點(diǎn),兩個(gè)控制輸入隨時(shí)間變化的多項(xiàng)式表達(dá)式為:

運(yùn)動(dòng)規(guī)劃的目的就是尋找有界的控制輸入u(t),使得系統(tǒng)從初始位形zi,經(jīng)過規(guī)定的時(shí)間T到達(dá)目標(biāo)位形zf,即滿足等式約束:

結(jié)合(6)式對(duì)(5)式積分可得各變量的終止位置,分別是關(guān)于 b1、b2、b3、b4的表達(dá)式:
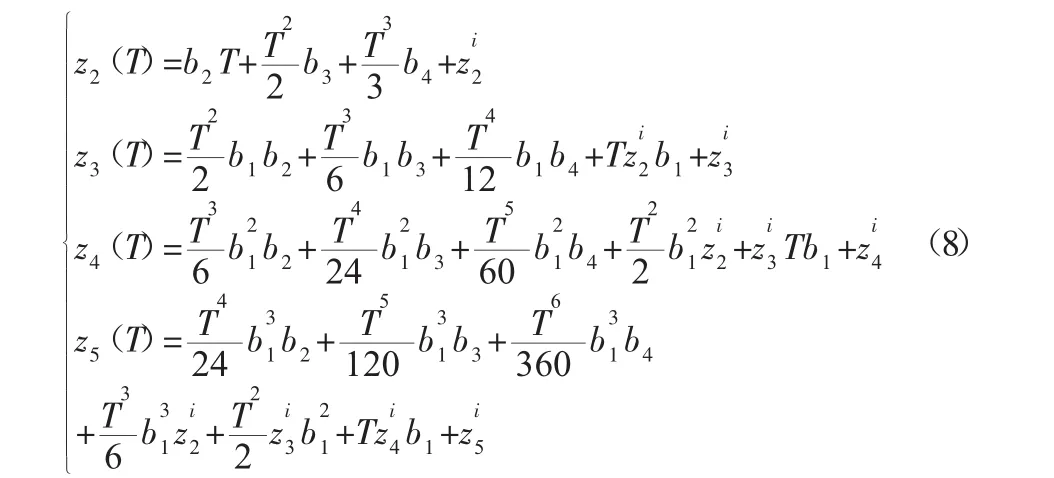
定義 b=[b1,b2,b3,b4]T,F(xiàn)=[f1,f2,f3,f4]T,給定時(shí)間 T 值,將(8)式代入(7)式中可得到關(guān)于 b1、b2、b3、b4的非線性方程組,寫成牛頓迭代格式有

式中:F′(b)—F(b)的雅克比矩陣;[F′(b)]+—F′(b)的偽逆。
給定初始值b(0)之后就可以通過迭代式(9)在MATLAB中計(jì)算得到b,將b代入式(8)得到zi(t)的軌跡。將(4)式進(jìn)行鏈?zhǔn)侥孀儞Q得到各關(guān)節(jié)角位移關(guān)于z變量的表達(dá)式如下:
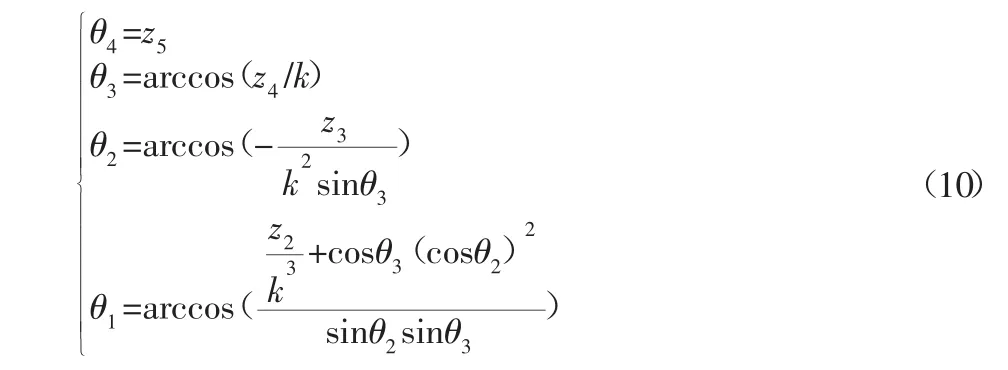
通過式(10)得到四個(gè)關(guān)節(jié)角位移的運(yùn)動(dòng)曲線。
5 四關(guān)節(jié)非完整機(jī)械臂的運(yùn)動(dòng)分析
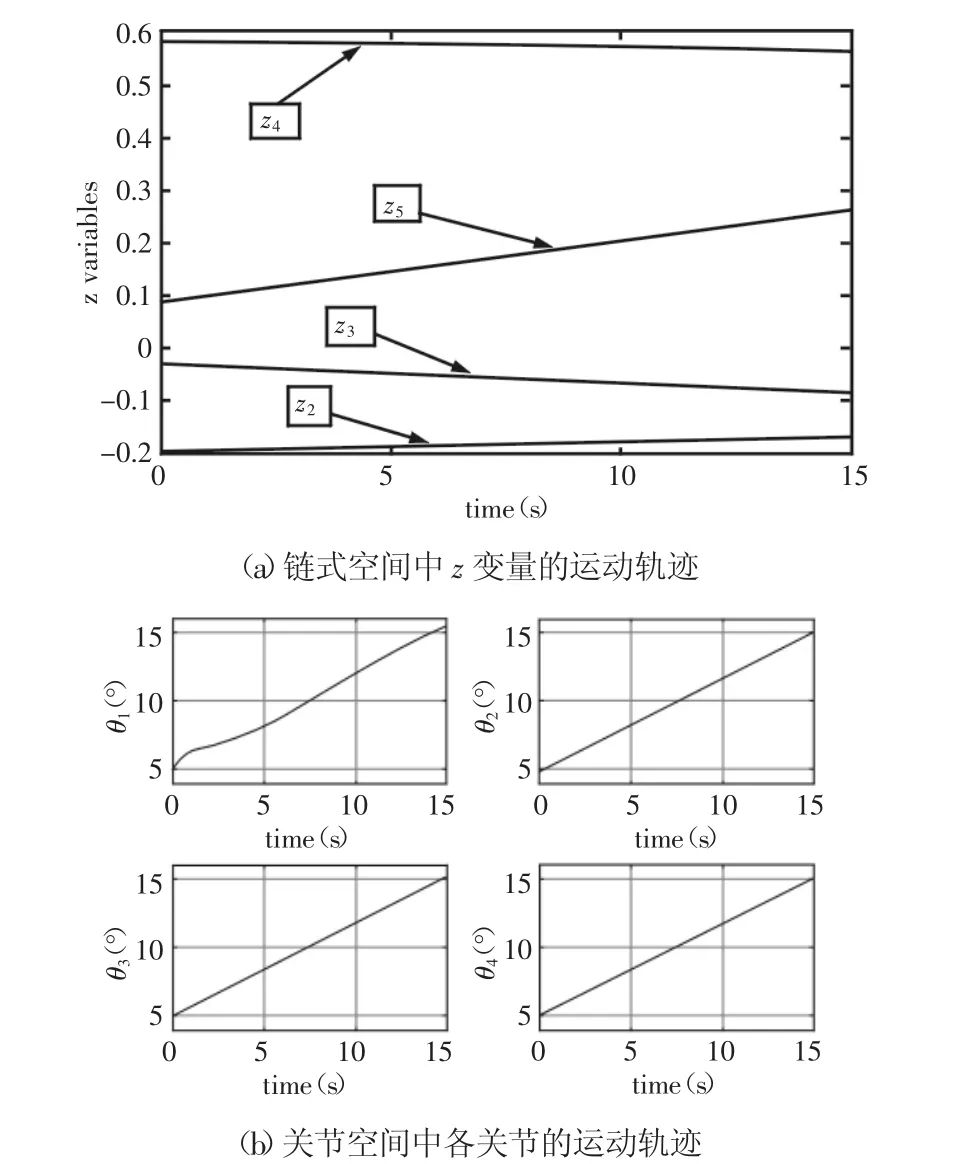
圖5 鏈?zhǔn)娇臻g中z變量、關(guān)節(jié)空間中各關(guān)節(jié)的運(yùn)動(dòng)軌跡示意圖Fig.5 The Diagram of the Motion Trajectory of the z Variables in the Chain Space and the Joints in the Joint Space
在 T=15s時(shí)刻,θ1=15.475174°,θ2=14.991161°,θ3=15.000081°,
θ4-=14.999982°。目標(biāo)位形誤差 eθ1=4.7517%,eθ2=0.08849%,eθ3=0.0008%,eθ4=0.00018%。
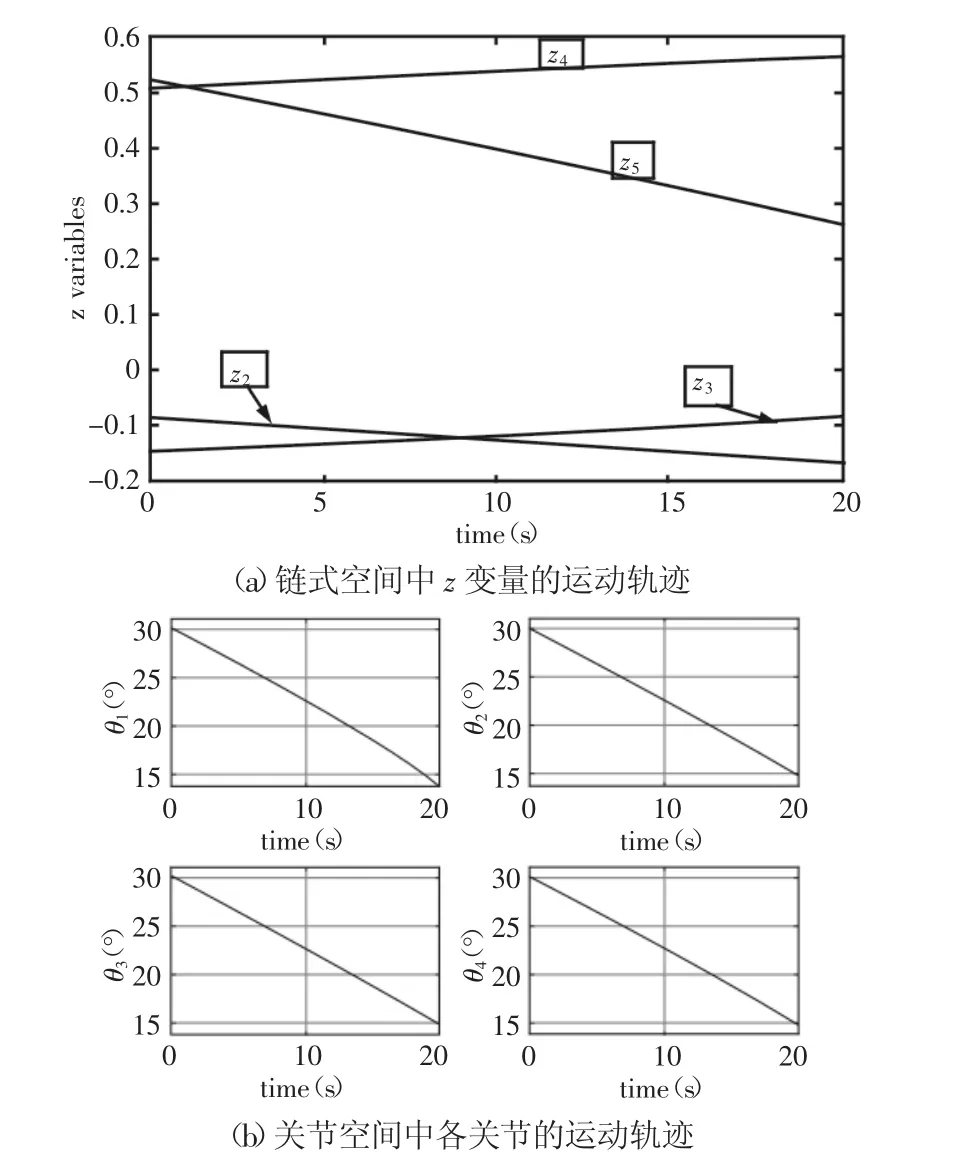
圖6 鏈?zhǔn)娇臻g中z變量、關(guān)節(jié)空間中各關(guān)節(jié)的運(yùn)動(dòng)軌跡Fig.6 The Motion Trajectory of z Variables and Joints in the Chain Space
在 T=20s 時(shí)刻,θ1=13.8563°,θ2=14.9868°,θ3=14.99997°,θ4=14.99997°。目標(biāo)位形誤差 eθ1=7.6251%,eθ2=0.08784%,eθ3=0.001275%,eθ4=0.0001636%。從兩組不同實(shí)驗(yàn)數(shù)據(jù)的目標(biāo)位形誤差結(jié)果可以看出,四關(guān)節(jié)非完整機(jī)械臂的后面3個(gè)關(guān)節(jié)在規(guī)定的時(shí)間內(nèi)從初始位形能夠準(zhǔn)確地運(yùn)動(dòng)至目標(biāo)位形,而第一個(gè)關(guān)節(jié)出現(xiàn)的誤差較大,是因?yàn)槠溥\(yùn)動(dòng)軌跡鏈?zhǔn)侥孀儞Q時(shí)函數(shù)關(guān)系復(fù)雜,與其他關(guān)節(jié)運(yùn)動(dòng)耦合程度高,求解復(fù)雜而容易產(chǎn)生累積誤差。
6 結(jié)論
基于摩擦圓盤運(yùn)動(dòng)分解合成機(jī)構(gòu),提出的一種新型并鏈?zhǔn)剿年P(guān)節(jié)非完整機(jī)械臂,結(jié)構(gòu)簡單,通過對(duì)運(yùn)動(dòng)模型的分析表明其具有非完整性和可控性,且運(yùn)動(dòng)模型能夠轉(zhuǎn)換成鏈?zhǔn)较到y(tǒng),并通過在鏈?zhǔn)较到y(tǒng)中運(yùn)用多項(xiàng)式輸入法進(jìn)行運(yùn)動(dòng)規(guī)劃,機(jī)械臂各關(guān)節(jié)能在規(guī)定時(shí)間內(nèi)準(zhǔn)確地運(yùn)動(dòng)至目標(biāo)位形,實(shí)現(xiàn)了兩個(gè)電機(jī)控制多關(guān)節(jié),表現(xiàn)出欠驅(qū)動(dòng)特性。由于當(dāng)鏈?zhǔn)娇臻g的運(yùn)動(dòng)軌跡通過鏈?zhǔn)侥孀儞Q回關(guān)節(jié)空間時(shí),會(huì)出現(xiàn)逆變換的關(guān)節(jié)角位移無實(shí)解的情況,即出現(xiàn)奇異位形,所以下一步工作將針對(duì)于鏈?zhǔn)侥孀儞Q奇異位形的規(guī)避展開,可以通過增加對(duì)z變量的約束來保證鏈?zhǔn)侥孀儞Q有解來實(shí)現(xiàn)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(bào)(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
