擺臂前置救援機器人運動特性分析
2018-07-19 07:33:54羅建國卜澤昊
機械設計與制造 2018年7期
羅建國,卜澤昊
(1.華北科技學院 機電工程學院,北京 101601;2.華北科技學院 研究生院,北京 101601)
1 引言
近些年,自然災害如地震,煤礦井下安全生產事故,危化品泄漏、爆炸事故,核事故,日常生活中的火災、管道爆炸等事故均威脅著人民的生命財產安全。救援機器人的研究極大提高了救援人員對事故現場的勘察與救援工作的開展,并且減少二次災害對于救援人員的傷害。國內外對各類救援機器人已經進行大量深入的研究,各種機器人均應用在高危和救援的場合,其中美國PackBot和Warrior系列機器人、日本Quince系列、日本東芝公司的蝎型機器人均應用于2011年日本福島核電站泄漏事故后的檢查探測任務[1]。中國礦業大學研制了CUMT-Ⅰ到Ⅳ系列煤礦救援機器人,每代機器人均在履帶結構、擺臂數量等方面作出優化[2]。文獻[3]對四履帶兩擺臂機器人的越障機理進行運動學分析,并以CUMT-Ⅱ驗證理論的運動能力。文獻[4]以動力學為基礎對自主研制的四履帶兩擺臂機器人的爬樓梯機理進行分析,并進行實驗對機構優化設計提供基礎。文獻[5]用D-H方法建立救援機器人越障高度與車身轉角、擺臂擺角的關系,文獻[6]建立了六履帶機器人的越障高度模型,但均未對質心水平位移越障條件進行分析。文獻[7-8]對各校所研究的履帶機器人進行ADAMS仿真驗證其運動性能。盡管已開展大量的研究,但目前救援機器人仍多處于試驗樣機研制,究其原因與其機械結構復雜、研制成本較高有關,由于參與實際救援的經驗較少而無法提出真正有效的改進。提出一種改進的前置擺臂履帶救援機器人,結構緊湊簡單,其運動特性良好能夠完成各類地形的攀越并且極大的降低了成本。
2 機器人結構
傳統履帶式救援機器人有固定雙履帶、四履帶兩擺臂、六履帶四擺臂、履帶可變節等形式,擺臂的加入提高了越障能力,并且數量越多,越障能力越強。然而其擺臂軸與車體輪軸處于重合位置,這使得傳動結構復雜同時增加了車體的寬度,需要高精度大扭矩的多個電機實現機器人的整體運動。擺臂同軸設計是為在機器人意外翻轉后實現復位,一些借助擺臂全周運動的步態缺乏穩定性,通過理論驗證的步態在實際樣機運動時效果并不理想。現對擺臂位置進行調整,使其位于主履帶的前方并保證擺臂履帶與主履帶寬度一致,相較之前同尺寸的設計,減小寬度的同時增加了長度,使得整體質心的位置前移,在跨越凸臺、溝壑等典型障礙物時具有更好的運動能力,同時避免擺臂輪與履帶輪同軸的復雜機械結構,使得救援機器人整體更加緊湊穩定,其SolidWorks模型,如圖1所示。
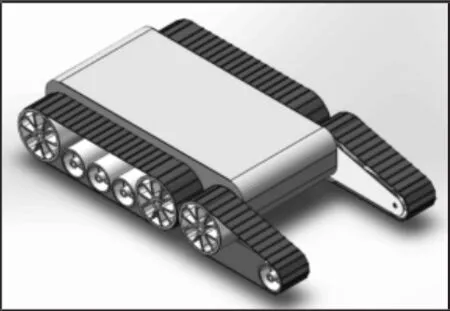
圖1 救援機器人模型Fig.1 The Model of Rescue Robot
擺臂前置式履帶救援機器人主要由車體、兩側主驅動系統、前兩側擺臂系統構成,車體內包含控制系統、信息采集系統、鋰電池、電機等部件,主驅動系統包含主驅動輪、從動輪、承重輪、主履帶,擺臂系統包含擺臂驅動輪、擺臂小輪、擺臂桿、擺臂履帶。主驅動系統和擺臂系統的部件通過側板連接,主驅動系統通過側板固定于車體兩側,電機經由渦輪蝸桿減速器與主驅動輪、擺臂驅動輪連接。
3 越障機理分析
3.1 跨越凸臺
事故類型不同其現場環境、障礙物類型也不同,結合Rescue Robot大賽中常見的障礙物將事故現場的非結構地形歸結為樓梯、凸臺、上下坡、溝壑等結構地形來進行測試。救援機器人具有左右對稱的特點,可視為剛體進行分析,從側面看具有串連機器人多連桿機構的特點,故采用D-H方法為機器人建立坐標系,確定參數即可獲得齊次變換方程。主車輪軸心距L1=350mm,L2=150mm,擺臂輪軸心距L3=210mm,大輪R=60mm,小輪r=35mm,擺臂履帶接地有效長度D=200mm。以爬越凸臺的位姿建立模型,如圖2所示。以主驅動輪與地面的接觸點為原點建立O0-X0Y0Z0,以主驅動輪軸心為原點建立O1-X1Y1Z1,以擺臂輪軸心為原點建立O2-X2Y2Z2,由于各坐標系在Z軸無偏移,故考慮XY平面的變換參數。主車體相對水平位置的轉角為α1,擺臂相對于車身的轉角為α2-90°(以O2為原心,逆時針方向為正),車體質心W1距主驅動輪軸心為d1,擺臂質心W2距擺臂驅動輪軸心為d2,車身質量m1,擺臂質量m2。
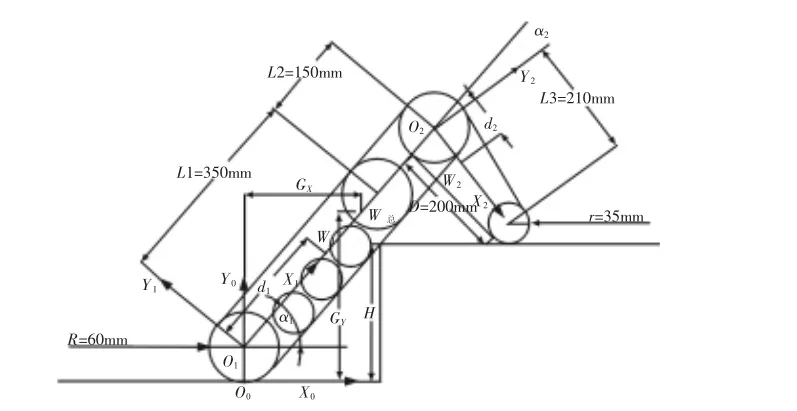
圖2 D-H坐標系模型Fig.2 The Model of D-H Coordinate System
W1在坐標系 1中是1G1=[d10 0 1]T,W2在坐標系 2中是2G2=[d20 0 1]T,由建立的坐標系和關節參數可得質心方程如下:
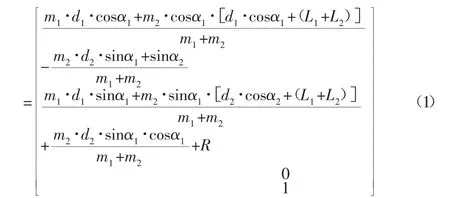
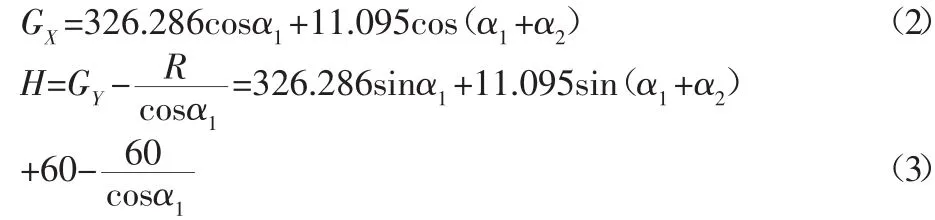
0G總(1,1),0G總(2,1)為整體質心在基坐標系{0}下的 XY 坐標。救援機器人跨越凸臺有2個關鍵條件:(1)質心縱坐標大于凸臺邊緣的高度。(2)質心橫坐標同時須大于凸臺邊緣線在{0}中的橫坐標。上式中的 m,d,L,R 均測量已知:m1=16.7kg,m2=3.2kg,d1=293mm,d2=69mm,在SolidWorks中對α2進行干涉檢查,得擺臂與主履帶干涉的極限角度為(-110°,+115°),由此建立質心 Gx、越障高度H與車體仰角α1和擺臂角α2間的關系式:
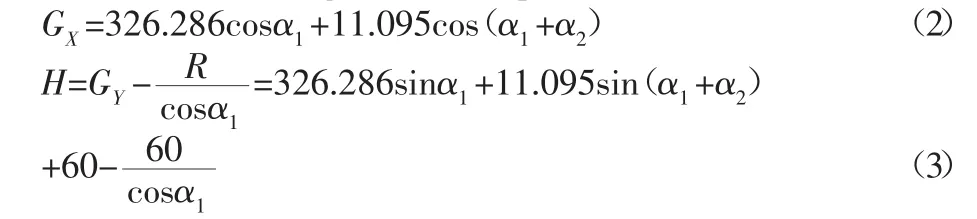
經MATLAB仿真計算得Hmax=234.58mm,此時α1=57°,α2=33°,如圖3(左)所示。對于d1,其值受鋰電池安裝位置、承重輪材質、車體材質影響會改變,而d2不受這些影響其值不變。不同d1值對越障高度的影響,d1越大質心越靠前,越障高度也越大。用Xd=(H-R)/tanα1+R表示在{0}下當GY≥H時凸臺邊緣距原點O0的水平距離,當GX≥Xd,才滿足第二個條件。GX與Xd在X軸方向位圖,其值均隨著車體仰角增大而減小,彩色亮圖為GX,黑色暗圖為Xd。如圖3(右)所示俯視圖,當GX≥Xd為圖中偏亮區域時滿足條件2,此域內找到的Hmax比全域內的Hmax小,但可同時保障機器人質心在水平和豎直方向均越過臺階邊緣線。
圖3 MATLAB越障分析圖Fig.3 MATLAB Diagram of Obstacle Crossing Analysis
3.2 其他地形越障分析
機器人轉向是借助兩側主履帶實現差速轉向。當兩側速度完全相反,以自身為圓心原地轉向;當兩側速度不同,以較小側為內側,一定曲率進行弧線的轉向運動。對于溝壑地形,需考慮其寬度和深度,當跨度大于機器人可跨越的寬度時,考慮其深度是否符合2.1中上下凸臺的高度,若符合,則可通過上下凸臺實現溝壑跨越。當跨度小于可跨越寬度時,前擺臂履帶水平接地使機器人整體長度最長時有利于跨越溝壑。假設機器人總質心G總距主驅動輪距離為d,有效接地總長為L,需保證質心在溝壑間移動時,其前端與后端均與地面接觸,即可跨越溝壑寬度

機器人爬坡和履帶與地面的摩擦系數有關,所示設重力為G,摩擦系數為μ,斜面傾角為β,故:

機器人爬樓梯需以一固定姿態連續爬越,擺臂履帶前端與主履帶后端間需與3個臺階邊緣線接觸才能穩定爬越,實測臺階高度為h=160mm,臺階面寬度為b=280mm,結合人體工程力學一般樓梯不會將h設計太高,一般不超過200mm,而b則根據不同場所其值會有所增大。機器人有效接地總長為L,以實測樓梯數據為準:

4 ADAMS仿真
在ADAMS中建立救援機器人模型,對車體進行簡化但仍保留輪系、車體、擺臂桿等部件,同時建立各類結構化地形,通過STEP函數與虛擬Sensor實現機器人的各種步態。在ADAMS和MATLAB中同時建立救援機器人的實體模型和數學模型,把α1,α2在MATLAB中的模型精確到1°,通過仿真取得不同時刻角度的曲線與MATLAB中的Gx,H,Xd數據集對應,可以取得越障前后的車體與擺臂轉角的大小與變化范圍,其流程,如圖4所示。
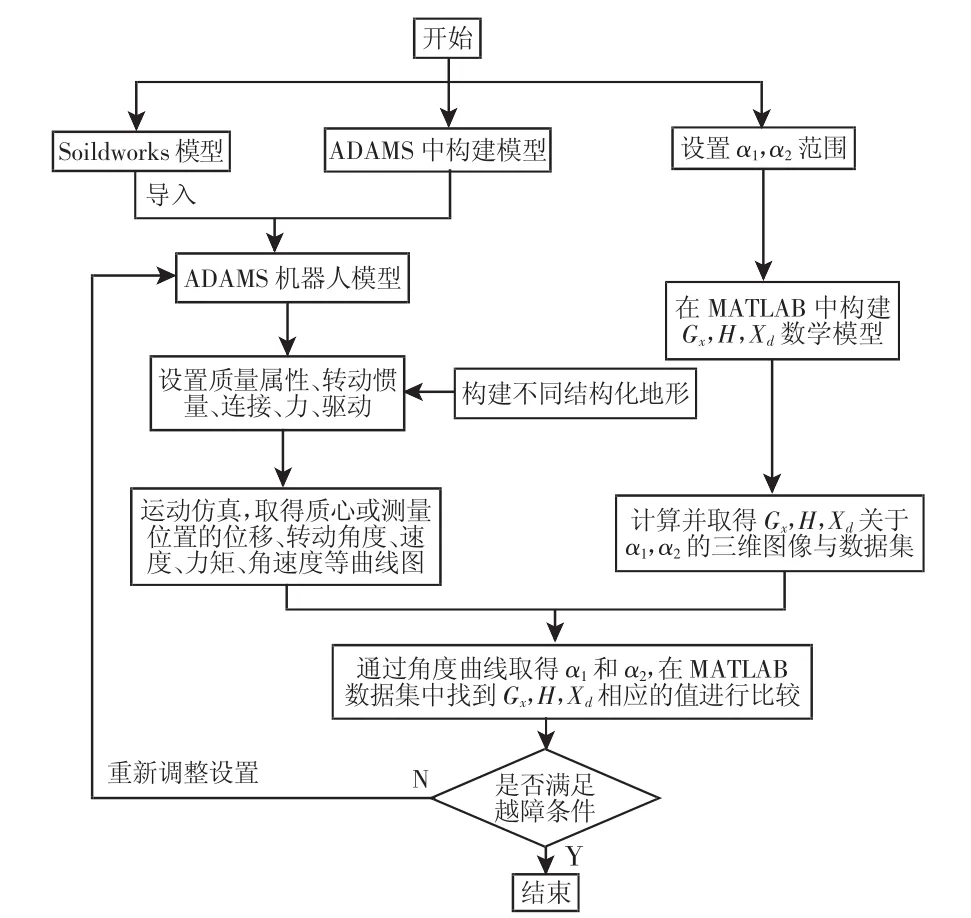
圖4 聯合分析流程圖Fig.4 Combination Analysis Flow Chart
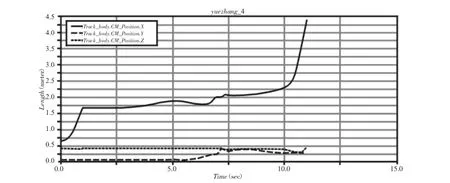
圖5 質心XYZ方向位移Fig.5 The Centroid Displacement Along XYZ
建立210mm高的凸臺,為驗證2(1)中對于越障機理的討論,設置仿真時間為10.5s,仿真步數為500,通過ADAMS獲得機器人質心在三維坐標軸的位移軌跡,如圖5所示。質心在X方向遇到障礙物后,位移增量減少,當10s過后爬上凸臺位移開始快速增加;質心在Y方向當越障時其值開始增大,在越障過程中先增大后減小至穩定值,增加的過程伴隨X方向值得增加,說明其Gx始終大于Xd;質心在Z方向始終穩定在固定值,說明在機器人前進和越障過程中沒有發生左右偏移,機器人運動較穩定。對于其他地形也可進行類似分析,取得質心在XYZ方向的位移、速度、力矩曲線驗證不同地形下的越障機理。
5 結論
(1)典型的越障新機構如行星輪式爬梯機構、六輪多足式機構、四或六弧形輪腿式機構均含有一定越障局限性。履帶式機器人與地面有較大接觸面積,移動穩定性較好,由于其履帶的可變形而具有較強的越障能力,前置擺臂結構簡化傳統擺臂式機器人復雜機械結構,對樓梯、凸臺、溝壑等地形時在相近尺寸下具有較強的通過性。同時也為柔性連接的履帶式機器人研究提供有力基礎[9]。(2)對于越障機理的研究經過了基于質心位置推導公式、D-H坐標法建立越障高度模型,相關文獻僅考慮豎直方向的越障條件,并未考慮質心水平方向的移動條件。在越障機理的研究中對質心X,Y方向的條件同時進行判斷,并基于客觀條件對模型進行了修正,借助MATLAB對數學模型進行分析,借助ADAMS仿真對實體模型的運動性能進行測試。(3)隨著分布式群體機器人概念的提出[10],救援機器人只有不斷簡化結構、提高穩定性才能在群體協作救援方面取得進步。前置擺臂式履帶機器人機構的提出極大降低群體機器人實驗研究、救援操作平臺系統設計、救援行動參與的成本,具有較強的實際意義。
