3-RRR球面并聯機構優化設計研究
2018-07-19 07:33:04柳偉兵趙宏宇
機械設計與制造 2018年7期
關鍵詞:優化
楊 健,周 鑫,柳偉兵,趙宏宇
(成都理工大學 核技術與自動化工程學院,四川 成都 610059)
1 引言
少自由度并聯機構憑借其多角度、高靈活性、輸出端誤差累積效應小等優點在機械加工、航天航空、3D打印、工業機器人等領域起到串聯機構不可替代的作用。其中3-RRR純轉動球面并聯機構作為典型代表,在其運動空間內具有定位精度高、運動靈活性較好等特點而被廣泛關注。
文獻[1-2]分別對這類并聯機構的構型組合方法、靜力學問題進行了探討,文獻[3-6]則針對運動學、空間奇異性等問題進行了研究。但此類3-RRR純轉動球面并聯機構的結構參數并不唯一,在保證9個運動副的軸線相交于空間內一點的基礎上,每個運動桿件的形狀、角度、動靜平臺的空間角度等參數各不相同,因此工程適應性各不相同。國內學者對此研究相對較少,國外有代表性的是:學者Bai.S利用空間四連桿建立對機構的約束,并通過將空間運動方程的正弦形式轉化為由輸入角的正切方程所構成的二項式形式,然后利用多項式的根值存在定理求解出的機構奇異位置,以進一步求解出幾組合理的機構幾何參數,最后利用其對應的雅克比矩陣加以驗證[7-8]。但這些利用幾何約束關系和空間奇異關系推導出合理結構參數,然后針對這些參數對其運動的靈巧性和工作空間進行驗證的方法,存在在工作空間最大化的求解過程中,各待解參數有陷入局部最優解和漏解,甚至無法取得靈巧性最大結構參數的問題[11-13]。
提出了一種智能遺傳算法,以3-RRR并聯機構的雅可比矩陣條件數為優化目標,以機構中電機輸入角度、各運動部件幾何構型、動靜平臺的空間角度等為優化參數,來獲取機構最大的工作空間和運動靈巧性。
2 3-RRR球面并聯機構工作原理
2.1 3-RRR球面并聯機構的構成模型
建立如圖1所示坐標系。取第一條運動學支鏈A1B1C1為研究對象,即圖中陰影部分,此運動鏈底部靜平臺開始至頂部動平臺之間的三個運動副關節的方向矢量描述依次為:u1、w1、v1,每個關節對應的旋轉角度為θ1、φ1、ψ1,矢量u1與矢量w1之間的夾角記為α1,矢量w1矢量v1之間的夾角記為α2,矢量u1與豎直方向的夾角記為γ,矢量v1矢量n之間的夾角記為β。
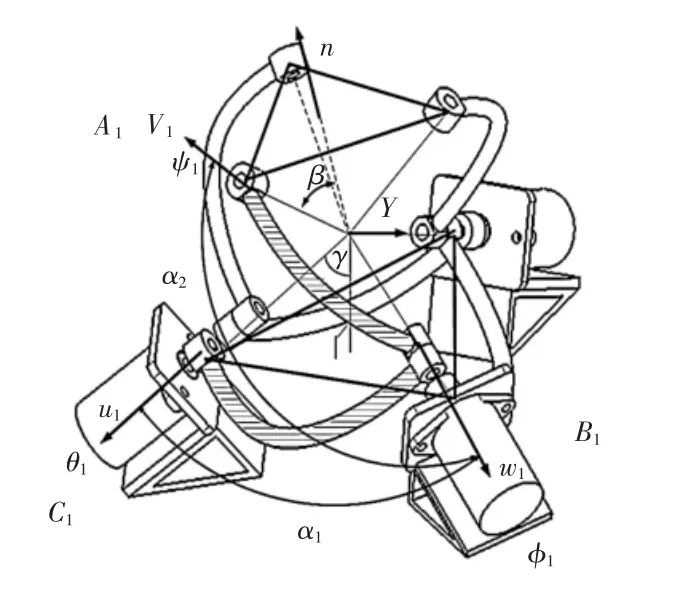
圖1 并聯機構模型Fig.1 Parallel Mechanism Model
故有||vi||=1。針對描述輸入端運動副轉動軸的方向矢量ui的幾何關系有:

式中:ηi—三條運動支鏈分配角度關系的參數;取 ηi=2(i-1)π/3,標志著三條運動支鏈以120°均勻分配在靜平臺的一周,由此:
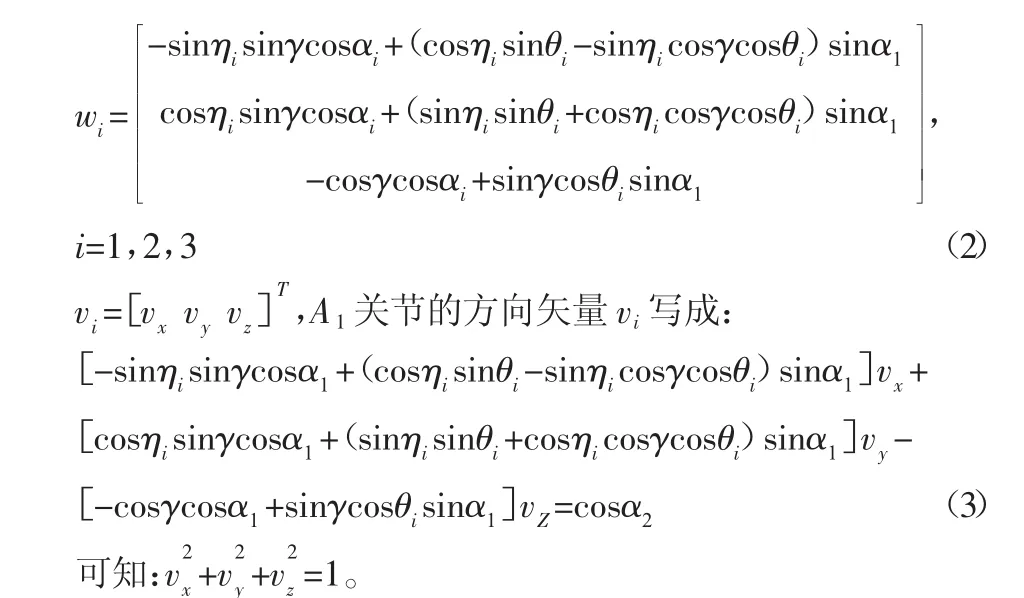
由于 ηi=2(i-1)π/3,γ、α1、α2為常量,在方程組中就存在 θi、vx、vy、vz四個未知數,只憑借兩個方程無法求解,故引入正切與余切半角公式,取第一運動學支鏈為計算目標,有η1=0、γ=π/3、α2=π/2,將代入式(3)中進行計算可得:

2.2 3-RRR球面并聯機構運動學雅可比矩陣
一般來說,運動學的速度方程可以利用運動學的位置方程通過對時間的一階偏導數方程進行描述,首先利用上述并聯機構所建立的數學模型:

各個終端繞該軸的角轉速可用一向量σ進行表示,如圖2所示。其中,繞著軸σ,速度vi(t)經過Δt時間后的速度變為vi(t+Δt),根據向量的叉積可表示為:v˙i=σ×vi,按照這種原則,將矢量wi、ui寫成關于并聯機構三條運動鏈電機輸入角加速度的表達形式為w˙i=θ˙i·ui×wi。
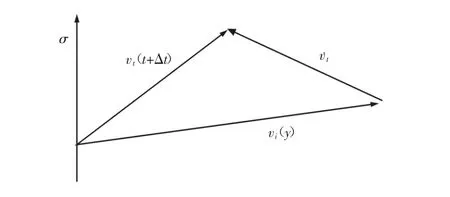
圖2 角速度向量與線速度向量的叉乘關系Fig.2 The Relationship Between the Angular Velocity Vector and the Line Velocity Vector
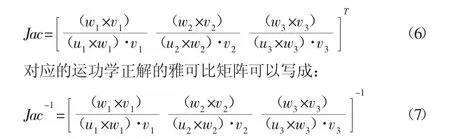
即:若已知并聯機構輸入θ˙i可以對機構末端輸出v_i進行求解,即運動學正解問題;若已知其末端輸出vi的角速度γ可以求解并聯機構的輸入θ˙i,即運動學反解問題,可進一步驗證關于并聯機構運動學正反解一體的特性,進而得出關于該機構的運動學反解的雅可比矩陣為:
3 基于遺傳算法結構優化
3.1 優化目標的選擇
為了后續方便計算,將式(7)記為 Jac=[J1,J2,J3]。
式中:ηi已知,α1、γ、θ、vx、vy、vZ作為結構優化對象,針對結構進行優化的基本原則為工作空間最大化,在此引入雅克比矩陣的條件數,描述方程為式中:J-1—雅可比矩陣的逆;|·|||—矩陣的任意范數;一般取歐幾里得范數(Euclid范數)。
雅可比矩陣的條件數是一個大于等于1的正數,其存在的意義在于,當kj越接近于1,說明機構的靈活性越好,反之靈活性變差,故此處取kj作為優化目標。鑒于優化目標中存在較多的待優化參數,為解決傳統算法搜索全局性差,存在漏解,且雅可比矩陣計算量較大,整個流程花費時間較長等問題,在此提出一種遺傳算法針對雅可比矩陣的條件數方程進行優化。
3.2 基于遺傳算法結構優化
遺傳算法是一種模仿達爾文生物進化機制,實現計算機并行搜索的數值優化方法,遺傳算法的主要計算流程可以概括為:
(1)編碼:計算之前要將實際數據預處理成為待計算編碼,目前應用較多的有一般二進制編碼和實數編碼;
(2)種群初始化:生成基因編碼的定義區間,從該區間內隨機產生父代基因,種群POP的規模越大算法搜索的全局性越好,但對應的計算復雜度也越高;
(3)適應度計算:在求解全局最大值的優化問題當中,適應度函數FitFun(x)通常選擇目標函數F(x)本身,將各編碼值帶入計算適應度值。
(4)選擇:一般采用轉輪式選擇法,按照所占轉輪比例隨機地進行個體基因編碼的選擇和淘汰,被選中的基因進行下一代計算,淘汰的基因則從待解集中刪除;
(5)交叉和變異:以一定概率(交叉概率)挑選一對基因,從指定的編碼位置斷開分別交換另一半編碼鏈組成新的基因。以一固定的概率(變異概率)在新的基因鏈中選取某一個編碼進行變異,實數編碼變異范圍是(0~9),二進制變異則0、1相互轉換,進而生成新一代的基因編碼;
(6)重復以上步驟(3)~(6),直到目標收斂獲得最優解或達到其他停機條件。
針對上述并聯機構遺傳優化問題的重難點主要集中在適應度函數的構建上,因為其中的待優化參數vx、vy、vZ無法直接寫出表達式,且以一定形式與 α1、γ、θi、α2相關聯。若直接利用計算機搜索的方式將vx、vy、vZ進行賦值計算難免會強行割裂其與待優化參數 α1、γ、θi、α2的關系,故此處在上文的基礎上,利用 tanθi/2 替換掉sinθi與cosθi,將問題轉化為多項式的根值存在問題,將根值存在的判斷式引入,作為適應度函數的判別方程:
由于雅克比矩陣的條件數kj為一個≥1的正數,故建立用于遺傳算法優化的適應度函數為:

此時適應度函數的返回值為1-kj≤0,在進行適應度選擇時kj的值越接近1,函數的返回值越小,這樣可以按照適應度值的大小進行排序和篩選。
改進適應度函數后遺傳算法流程,如圖3所示。
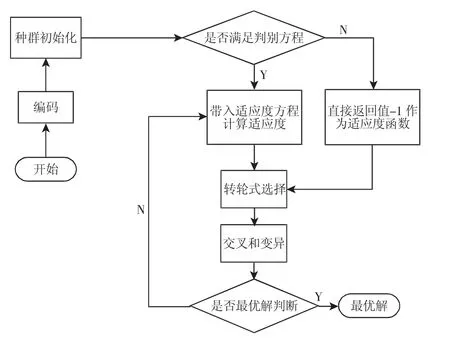
圖3 遺傳算法的流程圖Fig.3 Flow Chart of Genetic Algorithm
對于判斷優化結果是否達到最優解,引入以下判別方程:

其中,i、n數值根據計算的進程而變動,旨在將一段連續時間內適應度函數差值的總和進行監督,監督值ε按照適應度函數的變化情況取0.00001。同時將單運動學支鏈的末端輸出矢量也納入待優化的范疇,引入約束:v2x+v2y+v2z=1。
根據該機構的結構特性和遺傳算法的運算合理性,設定遺傳算法優化并聯機構相關參數,如表1所示。
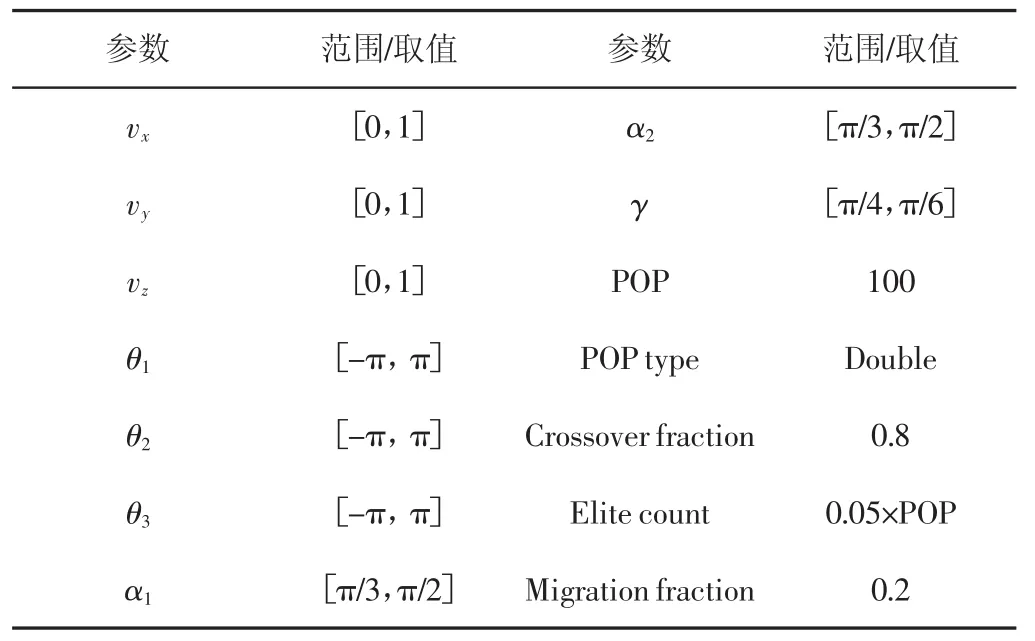
表1 遺傳算法中的各參數Tab.1 Parameters in the Genetic Algorithm
按參數對雅可比矩陣條件數進行優化,得到遺傳算法的適應度變化,如圖4所示。圖4中虛線代表在優化計算過程中各種群適應度的平均數變化曲線,出現波動的原因在于,在子群適應度不滿足適應度判別方程Fs時,函數返回值被強行置為-1以便于淘汰該數據,實線則代表每代子群中最佳適應度的變化曲線,最終在123代達到全局最優解。對比文獻[7-8,10]中的各組優化結果,如表2所示,本方法1/kj=0.999992,可見機構的運動靈活性得到了顯著提高。此時雅可比矩陣的條件數kj=1.000008,其余各優化目標,如表3所示。
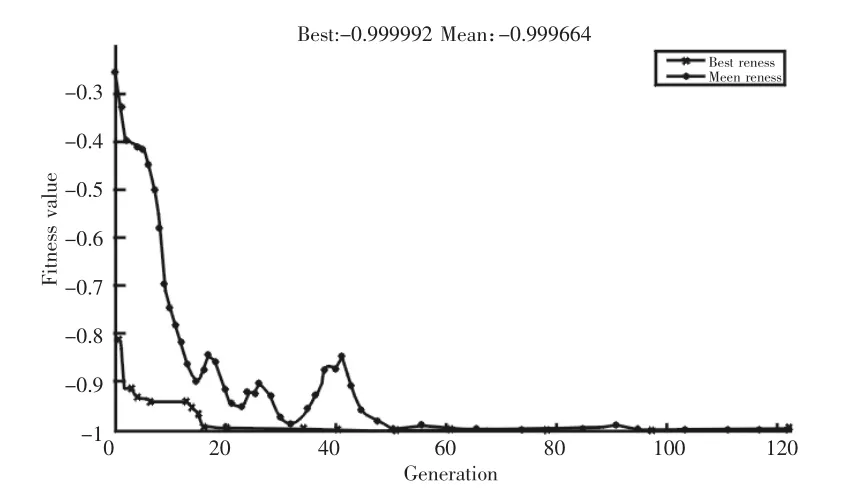
圖4 遺傳算法適應度變化情況Fig.4 Genetic Algorithm Adaptability Changes

表2 各方法優化結果對比Tab.2 Comparison of Methods to Optimize the Results

表3 各優化參數Tab.3 Optimization Parameters
根據以上優化結果搭建的物理樣機模型,如圖5所示。通過步進電機驅動,采集其末端動平臺的運動軌跡離散點,如圖6所示,可見其工作空間近乎一個完整的球面,僅在球面兩端出現很小工作空間空白,達到了優化設計目標。
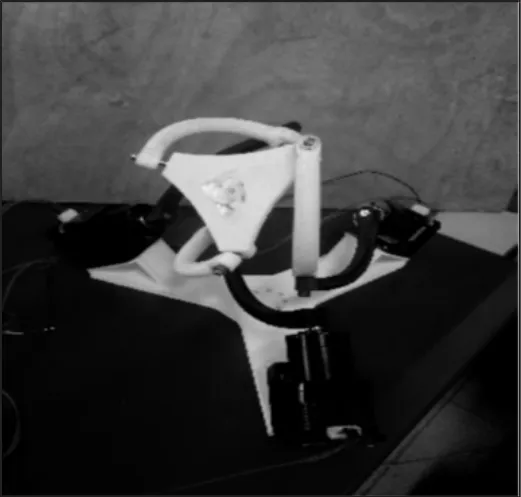
圖5 物理樣機Fig.5 Physical Prototypes Based on Optimization Results
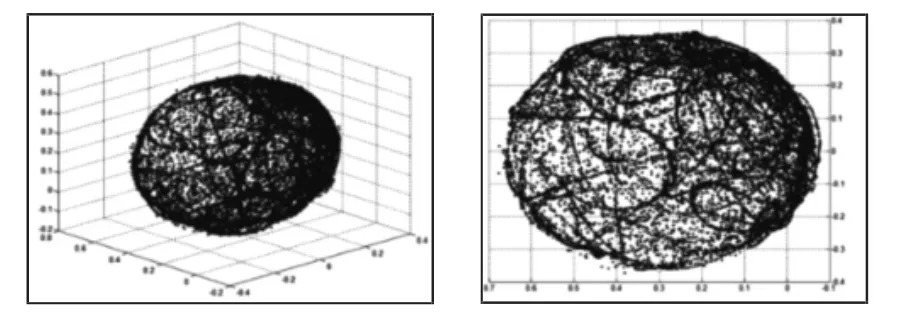
圖6 模擬工作空間分布情況Fig.6 Optimized Simulation of the Work Space Distribution
4 結論
為提高3-RRR球面并聯機構的運動靈巧性、擴大有效工作空間,提出了一種智能遺傳算法對機構中各關鍵參數進行優化,為保證機構的結構特性,引入了適應度函數的判別方程和約束方程,有效的將并聯機構的雅可比矩陣條件數控制在1.000008。相比國外學者對應的指標參數具有一定的優勢。據此搭建物理樣機進行實驗驗證,結果表明優化后的3-RRR并聯機構顯示出更強的工程實用性,具有更廣闊的應用前景。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
