挑夾式殘膜撿拾輸送機構的設計與研究
2018-07-19 07:32:34王志歡畢新勝張新超
機械設計與制造 2018年7期
王志歡,畢新勝,張新超,蔡 賀
(石河子大學 機械電氣工程學院,新疆 石河子 832003)
1 引言
地膜覆蓋栽培技術廣泛應用于我國的農業(yè)生產中。滯留在農田里的殘膜若不能及時回收,將會破壞土壤結構,造成嚴重的白色污染[1-2]。目前,國內雖已研制出多種類型的殘膜回收機具,但大都是先將殘膜和雜物一起撿拾,然后再進行除雜分離[3-7]。因殘膜具有柔軟、易吸附和易纏繞等特性,膜雜一起撿拾很容易使殘膜與秸稈等雜物進一步纏繞在一起,使膜雜分離效果不佳,殘膜含雜率過高,殘膜回收箱很快會被盛滿,在長地塊作業(yè)時頻繁到地頭停機卸膜。這不僅嚴重的影響了作業(yè)效率,而且不便于殘膜的回收利用。
因此,回收時必須先將秸稈和待收殘膜進行提前分離,利用先挑起除雜后夾持輸送的原理設計了一種新型地膜撿拾機構。
2 總體結構與工作原理
2.1 總體結構
該機具主要由切膜機構、挑桿裝置、夾持輸送裝置、脫膜裝置、殘膜收集箱等部件組成,結構簡圖,如圖1所示。其中,挑桿機構由松土鏟、挑膜桿、曲柄搖桿機構組成;夾持輸送裝置由夾塊機構、鏈板輸送等組成;脫模裝置由撐開齒、脫模輥。
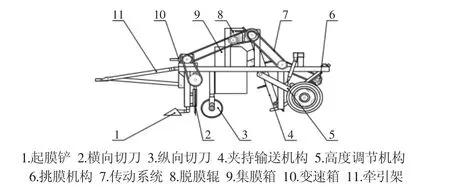
圖1 挑夾式農田殘膜撿拾機Fig.1 Picking and Gripping Farmland Residual Film Recycle Machine
2.2 工作原理
樣機以牽引方式與拖拉機連接,傳動系統(tǒng)通過傳動軸與拖拉機動力輸出軸相聯(lián)。作業(yè)時,機具順著苗行前行,前端的起膜鏟將兩邊埋在土壤里的地膜鏟起。縱向切膜裝置從寬行中間把膜切割成兩部分,橫向切膜裝置再進行橫向切割,最終將膜切成矩形的塊狀。隨后,挑膜桿在曲柄搖桿機構的帶動下產生往復挑起運動,挑膜桿將塊狀地膜挑起并塞入輸送的夾鉗裝置中,隨后迅速從夾鉗裝置中脫出,進行下一塊地膜的挑起運動。夾鉗裝置夾著地膜隨輸送向上運動,到達集膜箱后脫膜裝置將夾口裝置撐開并將薄膜刷下,完成一個收膜動作。
3 撿拾機構的設計與優(yōu)化
提出的撿拾部件為曲柄搖桿挑膜機構[8-9],如圖2所示。主要由挑膜桿、曲柄搖桿機構等組成。鉸鏈A、B,可分別看成人類的肩部和肘部,使撿拾機構更好的模擬人類用手臂撿拾殘膜的動作。
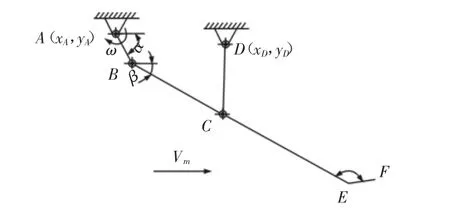
圖2 挑膜機構結構簡圖Fig.2 Force Diagram of Plastic Film
3.1 挑膜機構的數(shù)學模型
為使挑膜機構更好的將膜挑起,并可靠地將殘膜送入輸送夾口中,需對挑膜機構的運動規(guī)律和影響挑膜桿運動軌跡的主要技術參數(shù)進行分析,首先建立挑膜機構的二維平面模型[10]。
由圖2可知:

由此可得E點的位置方程:

進而可得F點的位置方程:

式中:θ=140°為定值。
由式(3)、式(4)式及 M、N、L、H、P、Q 可知,在 F 點的位置方程7中對F點坐標影響較大的參數(shù)是DA(x,y)和lAB、lBC。
3.2 挑膜機構的結構參數(shù)的優(yōu)化
根據機身空間以及挑膜機構安裝方位,將圖2中的BC、CD、CE、EF 的 長 度 lBC、lCD、lCE、lEF分 別 設 定 為 332、230、389.5、128.5mm,θ為定值。將DA(x,y)和lAB設為變量,通過Adams仿真實驗分析出挑膜桿頂點F相對于機身的運動軌跡[11]。
在大量的實驗數(shù)據中挑出的對應DA(x,y)和lAB有代表性的6組值,如表1所示。通過仿真實驗得出的與這六組值對應的F點運動軌跡,如圖3所示。為了將膜較有效的挑起,挑膜機構在參數(shù)優(yōu)化時,需滿足如下目標要求:軌跡的最低點應深入地面以下40mm;為防止在挑起過程中殘膜從挑膜桿脫落,在保證與夾持輸送機構可靠耦合的前提下軌跡最高點應盡量低;處在地面下部分的軌跡線應足夠長,以避免在機具工作過程中,挑膜頻率過高增加機具的負荷。軌跡上兩個線速度方向變化較迅速的圓弧段均應處在地面上方,以保證挑膜桿有較好的入土角度及出土角度,使挑膜動作更加順暢;因此,從圖中可以看出曲線5所對應的結構參數(shù)開發(fā)樣機,即lAB=70mm,DA(x,y)=(262mm,-188mm)。
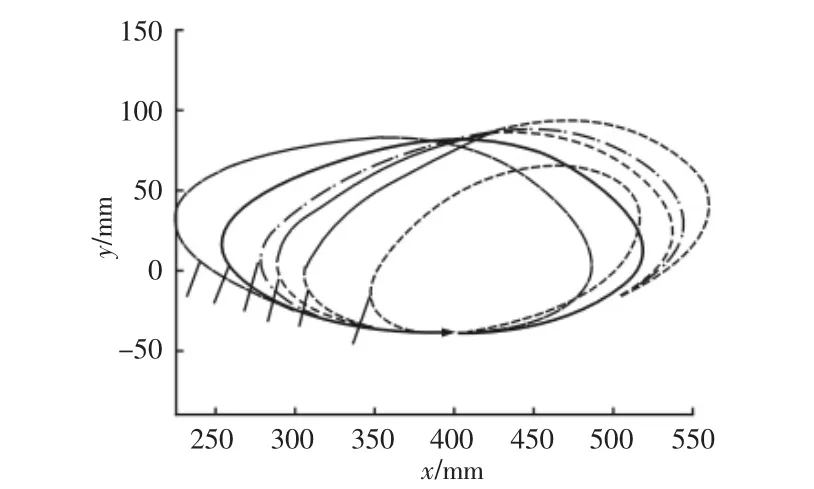
圖3 不同結構參數(shù)挑膜桿運動軌跡Fig.3 Moving Trajectory of Pick Membrane Rod to Different Structural Parameters

表1 不同軌跡線對應的結構參數(shù)Tab.1 Different Structural Parameters Corresponding to Different Trajectories/mm
3.3 挑膜機構運動參數(shù)的確定
挑膜機構挑膜計算公式:

式中:S—挑膜節(jié)距,m;
Vm—機具前進速度,m/s;
n2—曲柄轉速,r/min。
挑膜節(jié)距S挑的值,直接影響到挑膜的效果,由式(10)可知,要使挑膜節(jié)距S挑減小,則必須使機具前進速度Vm降低或使曲柄的轉速n2增加.綜合考慮實際作業(yè)條件及撿拾可靠性,將挑膜節(jié)距S的值設為250mm,機具前進的速度Vm=3.6km/h,則曲柄轉速n2=240r/min。
取挑膜桿上E、F兩點為測試對象,采用軌跡曲線5所對應的挑膜機構結構參數(shù)以及上述的運動參數(shù),利用Adams軟件對挑膜機構進行仿真實驗,得到的F點水平速度曲線和E、F兩點運動軌跡曲線,如圖4所示。在圖中可以看出,F(xiàn)點從入土到出土的整個過程中水平速度的方向始終是向前的。由此證明,挑膜機構各運動參數(shù)的選取是合適的。
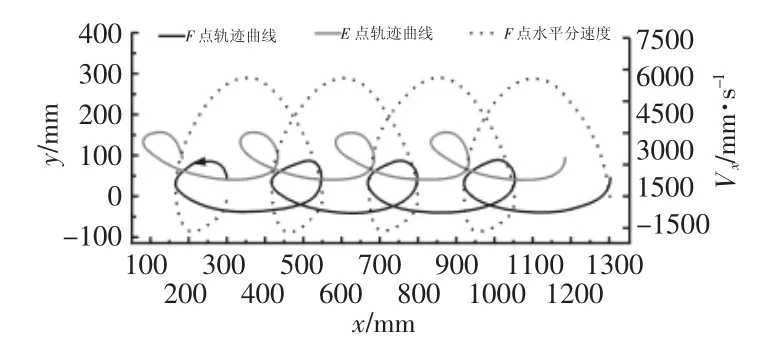
圖4 挑膜桿運動軌跡和水平速度分量Fig.4 Moving Trajectory of Pick Membrane Rod and Horizontal Velocity Component
4 夾持輸送機構的設計
4.1 夾持輸送機構結構參數(shù)的確定
夾持輸送機構,如圖5所示。此裝置由夾塊機構、鏈板輸送、固定機構等幾部分組成。每個夾塊機構固定在鏈板上,隨鏈板做往復回形運動。綜合考慮田間作業(yè)條件、機架允許空間以及挑膜桿末端運動軌跡,選定夾鉗頂端軌跡曲線的圓弧半徑r=165mm、輸送上夾鉗的高度s=115mm、輸送與豎直方向夾角β=12°。
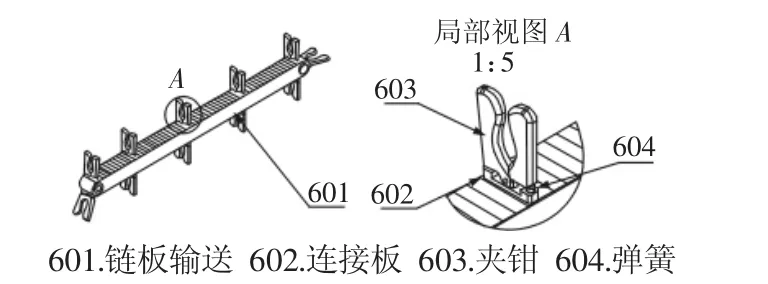
圖5 夾持輸送機構Fig.5 Gripping Delivery Mechanism
4.2 挑膜與夾持輸送機構相對位置的確定
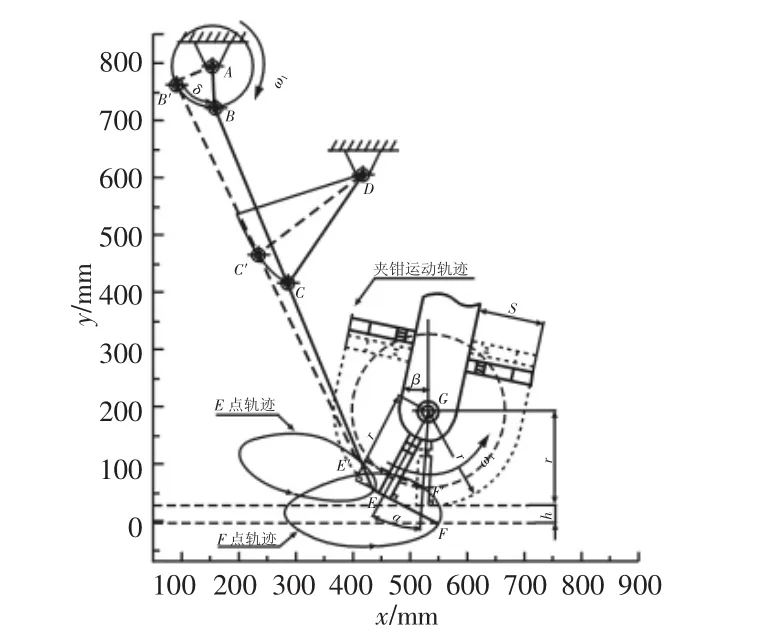
圖6 挑膜機構與夾持輸送機構相對運動關系簡圖Fig.6 Pick Membrane Rod and Gripping Delivery Mechanism Relative Motion Relationship Diagram
由于坐標系中的曲柄搖桿的機架A、D點坐標以及對應的E、F點的軌跡曲線是從Adams中精確導入的,因此本問題可通過圖解法來解決。由挑膜桿上E、F點的運動軌跡可知,在一個周期內,挑膜桿末端插入土壤向前運動過程中,殘膜會在挑膜桿上E點附近形成堆積,所以挑膜桿應盡量選在E點處與夾鉗接觸。由圖6可知,在挑膜桿末端F點剛離開地面的瞬間使挑膜桿和夾鉗開始接觸并使兩者相互垂直(圖6中實線所示),不但可以保證更多的殘膜送入夾鉗,而且可以減少挑膜桿所受的阻力,使挑膜桿和夾持輸送的配合更加可靠。
另外為避免夾持輸送在運轉過程中與地面接觸,根據實際作業(yè)條件,將夾鉗頂端運動軌跡最低點與地面的距離h設定為30mm。
通過以上兩段分析可知,在圖4坐標系中夾鉗頂端運動軌跡曲線應同時和EF所在直線以及距離地面h的直線相切。依此可確定出夾持輸送機構相對于挑膜機構的位置。綜合考慮機架空間,及作業(yè)條件將夾鉗高度s設定為115mm,夾鉗頂點旋轉半徑r設定為165,β設為12°。于是G點對A點的相對位置GA(x,y)=(365mm,-600mm)。
4.3 夾持輸送機構工作參數(shù)的確定
挑膜桿與夾鉗觸后并繼續(xù)產生相對運動,挑膜桿逐漸將膜塞入夾鉗內,待挑膜桿末端運動到夾鉗凹槽處時兩者開始脫離,殘膜因被夾鉗夾持住留在夾鉗上。通過作圖可知,以G點為圓心以夾鉗的凹槽邊線到G點距離為半徑畫圓與F點軌跡曲線的交點(圖6中虛線所示)即為挑膜桿和夾鉗的脫離點。
通過以上分析可知,夾持輸送的轉速n1由下式得出:

式中:T—挑膜周期;δ—挑膜桿與夾鉗從接觸到分離的時間段內曲柄轉過角度;α—挑膜桿與夾鉗從接觸到分離的時間段內夾鉗轉過角度;
由上節(jié)可知 T=0.25s,通過圖解法測得 δ=68°,α=23°。帶入數(shù)值可得 n1≈81.18r/min。
由上式可進一步求得輸送上夾鉗的間距即:

式中:l—輸送上夾鉗的間距;r—夾鉗頂端軌跡曲線的圓弧半徑;s—夾鉗總高度;
帶入數(shù)值后求得夾鉗間距l(xiāng)≈106.2mm.由圖6可知,機具運動過程中并無部件間的干涉,且部件間相對運動順暢可靠。由此可證明,以上各參數(shù)的設置是恰當?shù)摹?/p>
5 田間試驗
試驗地在新疆某團,作業(yè)地塊為秋后收獲后的棉田,秸稈已被粉碎并散落在殘膜表面,秸稈茬平均高度小于120mm、地面相對較平整,滴管帶已被回收。試驗在一個膜幅上進行,薄膜幅寬為210cm棉花種植行距為(660+100)mm,株距為110mm,薄膜厚度0.01mm,地膜邊緣被埋入土中,機具前進速度為(3~4)km/h。配備動力為約翰迪爾454型拖拉機。
試驗在一個膜幅上進行,薄膜幅寬為210cm,作業(yè)長度100m,從試驗地塊上隨機選取5個區(qū)域重復試驗,對試驗數(shù)據記錄并處理。實驗結果,如表2所示。
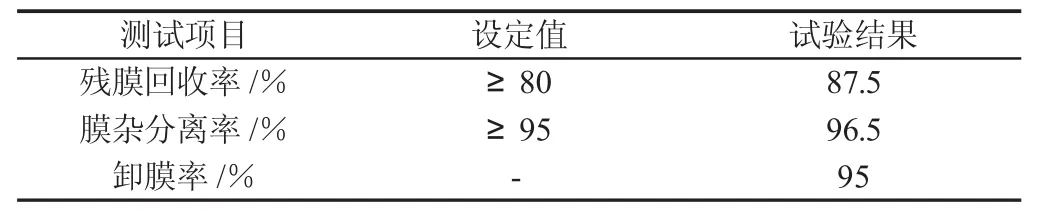
表2 實驗結果Tab.2 Experient Result
機具工作過程中,挑膜機構的運動軌跡較為理想,能順利的將膜挑起并塞入夾鉗內,基本沒有殘膜纏繞問題出現(xiàn);但由于秸稈茬的存在,機具在撿拾過程中會有少量殘膜被秸稈茬鉤掛住,對殘膜回收率有一定影響。另外挑膜機構在運動過程中有較明顯振動,在以后研究中,還需對其進行改進。
6 結論
(1)通過對挑膜機構的優(yōu)化設計,得到曲柄搖桿機構的結構參 數(shù) lAB、lBC、lCD、lCE、lEF分 別 為 70mm、332mm、230mm、389.5mm、128.5mm,DA(x,y)為(262mm,-188mm)。
(2)通過圖解法分析得到夾持輸送鏈板的旋轉半徑為50mm,夾鉗高度為115mm,夾鉗間隔為106.2mm,相對豎直方向偏轉角度為12°。
(3)挑夾式殘膜撿拾輸送機構較好的模仿了人類用手臂撿拾殘膜的動作,試驗證明,挑膜機構曲柄轉速n=240r/min,夾持輸送機構轉速n=81.18r/min時,機構能可靠的將膜挑起并輸送到集膜箱,基本能夠滿足殘膜回收的田間作業(yè)要求。
