洱海濕地昆蟲智能識別與實時監測系統
2018-07-05 08:22:02羅桂蘭楊自忠吳仕龍
大理大學學報 2018年6期
關鍵詞:特征
羅桂蘭,楊自忠,張 梅,吳仕龍,張 倩,安 東
(1.大理大學數學與計算機學院,云南大理 671003;大理大學昆蟲生物醫藥開發研究院,云南大理 671003)
有效的誘捕器和誘餌是昆蟲監測和調查最廣泛的方法〔1〕。而基于計算機的色彩、聲音、形態、空域紋理和頻譜紋理等多特征研究是目前昆蟲識別的關鍵技術〔2〕。對于野外活體昆蟲的實時監測和動態識別需要昆蟲監測與識別的有效動態結合。
在昆蟲監測方面,根據昆蟲的趨性原理市場上已有各種誘捕器。例如利用趨光性設計的燈光誘捕器,通過頻振殺蟲燈就可高效地誘殺棉鈴蟲;利用趨色性設計的粘蟲色板誘集,通過銀灰色塑料薄膜可誘殺對銀灰色敏感的蚜蟲;利用趨化性設計的嗅覺誘捕器,通過跟蹤信息素可誘殺白蟻。隨著現代信息技術的發展,誘捕器的精準性、高效性、快捷性、綜合性等指標已成為蟲情監測新要求。美國農業部利用紅外傳感器技術研制出一種谷類害蟲探測計數系統,能實時監測倉儲害蟲,計數精確度達95%以上〔3〕。可見多功能、智能化、自動化、專業化的誘捕器是蟲情監測發展的必然趨勢。利用雷達、計算機視覺、微電子、預測決策和網絡信息等高新科技技術開發新型誘捕器勢在必行。
在昆蟲識別方面,國內西安電子科技大學基于ELM理論設計了一種昆蟲分類器〔4〕,昆蟲識別正確率達到97%。文獻〔5〕采用基于電流變化感應和矩陣按鍵識別技術實現了昆蟲自動計數。CN 101546094A公開了一種基于CMOS圖像傳感器的發明專利,其以數字化形式實現了0.1 mm~2 cm大小的爬行動物如螞蟻、蜘蛛的足跡監測與跟蹤等〔6〕。現有這些識別技術都采用了計算機的軟件、硬件和相關算法等,特別適合昆蟲標本的研究,但對于活體昆蟲識別有待改進。
研究發現,鱗翅目、鞘翅目、直翅目等昆蟲是濕地的優勢群體。這類昆蟲隱蔽性強,傳統監測難度大〔7-10〕。從系統的成本、效率、便捷等方面考慮,本文借助物聯網、現代通信網絡等信息技術,為實現昆蟲的網絡實時觀測和生命特征參數統計,設計了一種基于多特征昆蟲識別算法的活體昆蟲智能識別與監測系統。
1 智能識別與實時監測系統設計
1.1 系統功能架構 根據洱海濕地生態環境的差異性將濕地劃分為若干個監測區域,每個監測區域根據硬件監測范圍大小和地形確定監測點數量(2~10個)及部署方式(隨機、網格、圓形等形式)。監測點之間相互獨立,所有監測點數據最終都上傳到同一個云服務器。
以一個監測點為例,在整個監測過程中,各類傳感器實現昆蟲特征數據采集。系統首先利用紅外傳感器模塊監測進行昆蟲計數,其次利用超聲波傳感器監測是否有活體昆蟲,再次利用聲音、顏色圖像傳感器識別昆蟲種類。中央處理器完成傳感器數據融合處理,并通過4G或WIFI通信方式將特征信息傳送到云服務器,再由云服務器進行數據存儲、計算和統計分析等。而終端設備(個人電腦、平板、手機等)可通過APP或瀏覽器實現昆蟲數據動態實時觀察。
監測系統功能模塊架構見圖1。
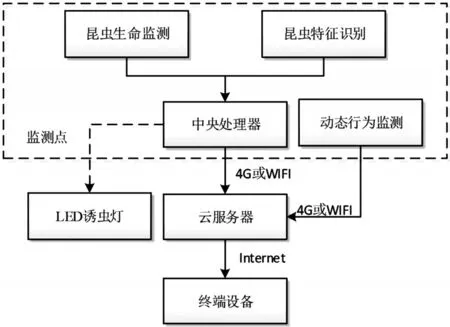
圖1 監測系統功能模塊架構
系統運行中利用LED燈產生的紫光進行誘蟲,與此同時開啟360°網絡攝像頭進行昆蟲行為監測,并將視頻傳送到云服務器進行實時監測。硬件模塊架構見圖2。

圖2 硬件模塊架構
1.2 監測節點硬件模塊設計 一個監測點主要由LED誘蟲燈、昆蟲生命監測、昆蟲特征識別、動態行為監測和中央處理器等模塊構成。
1.2.1 昆蟲生命監測模塊 該模塊在監測區域內首先采用紅外對射計數傳感器實現昆蟲計數,再次利用超聲波傳感器監測是否有活體昆蟲。從而判斷出昆蟲的生命特征。
1.2.2 特征識別模塊 本模塊采用聲音傳感器、顏色傳感器和CMOS圖像傳感器進行昆蟲色彩、聲音、形態和紋理等多特征數據采集,并將特征信息傳輸至云服務器,由云服務器通過多特征昆蟲識別算法判定昆蟲種類特征等。
1.2.3 中央處理器模塊 可選用嵌入式芯片或單片機。在成本允許情況下,優先選用嵌入式芯片。采用單片機為控制芯片時成本較低,但數據處理能力和精確度有限。
1.2.4 LED誘蟲燈模塊 昆蟲的趨光性可以刺激其視覺神經激發昆蟲的可見光區主要在330~400 nm的紅外光波,尤其是鱗翅目和鞘翅目昆蟲對紅外光特別敏感。針對濕地活體昆蟲研究趨光性燈光誘捕較為適合。該模塊可以由中央處理器控制LED發出的紫光實現,也可以采用多個獨立的LED誘蟲燈。
1.2.5 動態行為監測模塊 該模塊獨立于中央處理器。選用360°網絡攝像頭,通過4G或WIFI直接與云服務器相連接。
2 多特征昆蟲識別算法
2.1 生命特征識別原理
2.1.1 昆蟲計數方法 通過紅外對射計數傳感器進行昆蟲計數。當有昆蟲通過時光被遮擋住,接收模塊通過輸出的高電平脈沖進行昆蟲計數統計。為提高紅外監測范圍和精確度,在每個監測區域可采用多紅外對射計數傳感器進行部署監測,部署方式根據傳感器監測范圍和監測區域的地形等決定。2.1.2 昆蟲活體監測方法 超聲波是一種振動頻率高于聲波的機械波,在碰到活動物體能產生多普勒效應。目前超聲波傳感器廣泛應用在工業、國防、生物醫學等方面。超聲波傳感器特別適合“空氣”介質工作,更適合精確監測相對較小的物體。
本文在每個監測區域都部署了超聲波傳感器。將發送器和接收器布置在昆蟲監測范圍的中心,反射板置于監測范圍的邊緣,并以無昆蟲遮擋時的反射波衰減值作為基準值,當反射波衰減值比基準值小時,說明監測范圍內有昆蟲通過,從而實現昆蟲活體監測。
2.2 聲音特征識別原理 聲音識別采用了人類語音識別領域的技術〔11〕,并在這個基礎上提出一種新穎的、簡單可行的昆蟲聲音自動鑒別方法,用聲音參數作為昆蟲聲紋識別設計了一種簡單易行的識別算法。
聲音信號首先經過預處理、分段得到一系列的聲音樣本,然后從聲音樣本中提取Mel倒譜系數(Mel Frequency Cepstrum Coefficient,MFCC),并用LBG(Linde-Buzo-Gray)算法對提取的MFCC進行矢量量化(VQ),所得碼字作為聲音樣本的特征模型。聲音識別流程見圖3。

圖3 基于VQ的昆蟲聲音識別流程圖
本文中采用LBG算法形成代表聲紋特征的VQ碼本,LBG算法是由Linde Y、Buzo A和Gray RM三人提出的。此算法按最近鄰準則用初始碼本中的各個碼字對訓練序列進行劃分,從而形成J個子集,每一子集為一類,J為碼本容量〔12〕。
2.3 顏色特征識別原理 顏色作為物種的固有特征,是進行物種鑒定的重要依據之一。本文采用RGB圖像顏色分布直方圖的方法,首先將H分量量化16級,將S分量和V分量分別量化為4級,然后將3個顏色分量合成為一維特征向量:

其中,QS、QV分別是S和V的量化級數,L取值范圍[0,255],最后計算L的直方圖分布,根據圖像RGB值判斷識別對象的顏色。L計算方法如下:顏色特征識別算法流程見圖4。

2.4 算法實現步驟 第一,先利用硬件平臺上的紅外識別模塊和超聲波模塊來識別周圍有無生命跡象,模塊正面感應范圍為5~7 m,感應角度<100°,最外圍感應距離為3~4 m。若能在此范圍內識別到有生命跡象則昆蟲計數,并執行下一步算法,即聲音識別算法,若監測不到周圍3~5 m范圍內有生命跡象,則結束算法。
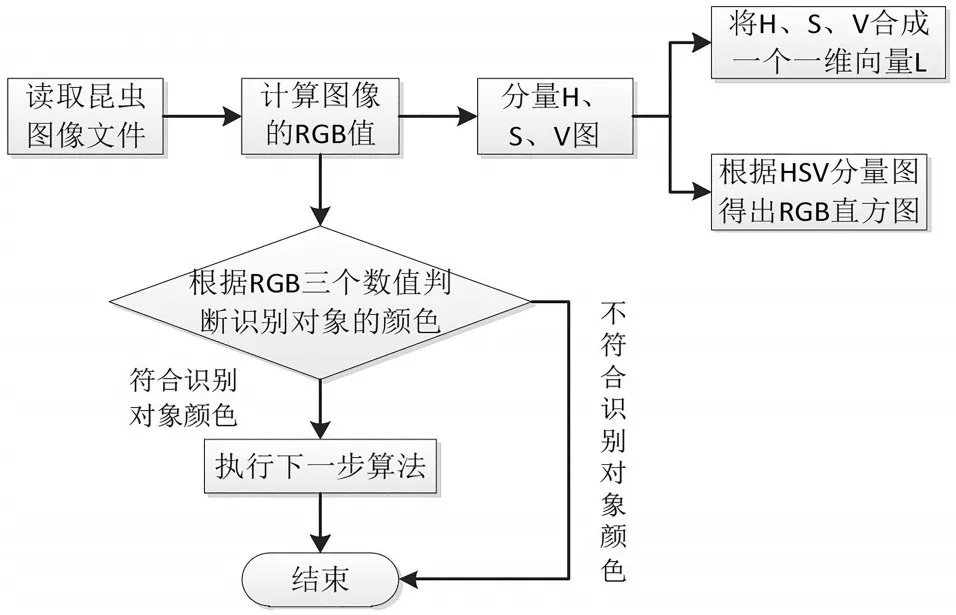
圖4 顏色特征識別算法流程圖
第二,完成上一步紅外識別算法之后執行基于Mel倒普系數和VQ的聲音識別算法,本次聲音監測算法的頻率范圍在3~8 KHz,如果被識別對象的聲音頻率在此范圍內,則執行下一步算法,即顏色識別算法,若被識別對象的聲音頻率不在此頻率范圍之內,則結束算法。
第三,完成上一步聲音識別算法之后執行基于RGB彩色圖像直方圖的方法來監測識別對象的顏色,通過定義R、G、B3個數值的范圍,R取值范圍是0~255,G取值范圍是0~255,B取值范圍是0~255,根據RGB三原色的3個數值來判斷識別對象的顏色。
2.5 算法程序設計 根據上節算法實現步驟,算法程序設計流程見圖5。

圖5 程序設計流程圖

圖7 原始聲音信號圖和FFT后的波形圖
3 系統仿真與性能分析
3.1 昆蟲聲音識別仿真分析 蟈蟈屬于直翅目螽斯科,其翅短,鳴聲清脆響亮。體色分綠色和褐色兩種,身形碩大。本文選用蟈蟈作為實驗對象,對其聲音和顏色進行實驗識別測試。
利用Matlab進行聲音識別仿真設計與性能分析,實驗結果見圖6~7。
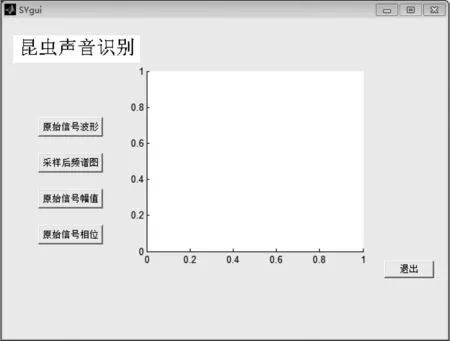
圖6 昆蟲聲音識別算法仿真GUI界面
從圖7可見:原始語音信號經過傅里葉變換信號比較平穩。語音波形是時間的連續函數,因而音到音之間有逐漸過渡。
3.2 昆蟲顏色識別仿真分析 利用Matlab進行聲音識別仿真設計與性能分析,實驗結果見圖8~10。
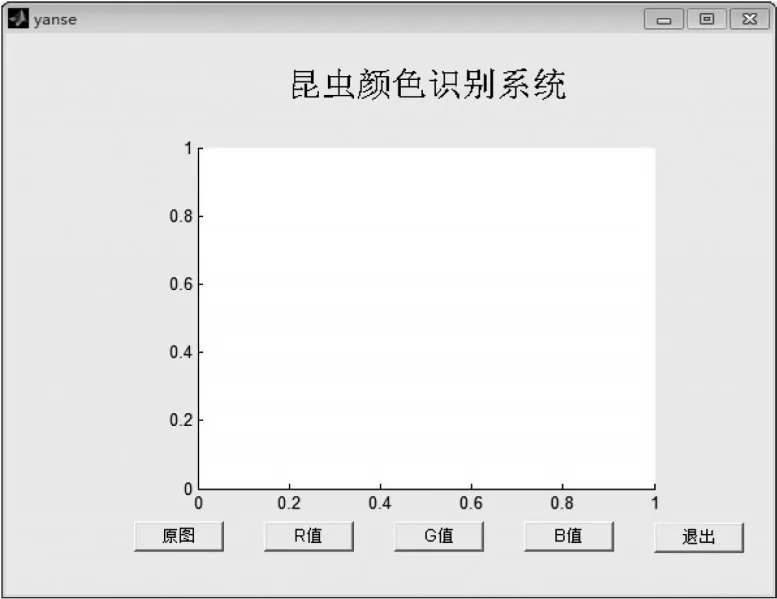
圖8 昆蟲顏色識別算法仿真GUI界面
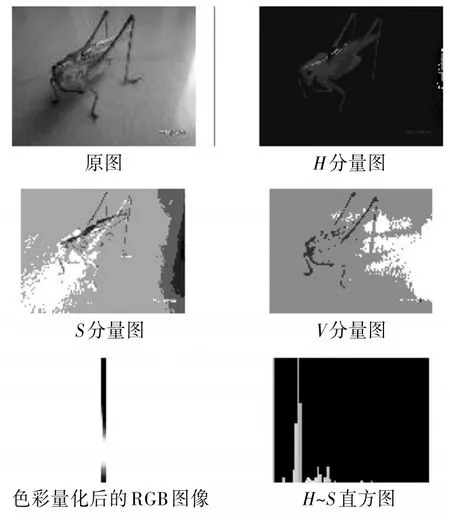
圖9 蟈蟈彩色圖像的H、S、V分量圖
由圖9可見:首先將H分量量化16級,將S分量和V分量分別量化為4級,然后將3個顏色分量合成為一維特征向量L,得出H、S、V的分量圖,然后通過H、S、V的分量圖畫出色彩量化后的RGB圖像。
RGB_image=cat(3,PR,PG,PB);%將 PR、PG、PB 3個矩陣在第3個維度上進行級聯,進行圖像合成
PR=RGB_image(:,:,1);%提取紅色分量PG=RGB_image(:,:,2);%提取綠色分量PB=RGB_image(:,:,3);%提取藍色分量
從圖10仿真結果可得:仿真圖的橫坐標表示的是圖像中各個像素點的灰度級,而縱坐標表示的是各個灰度級上各個像素點出現的次數。在[0~100]這一灰度級上,B值出現的次數比R和G都多,即藍色值點數多。在[100~255]這156個灰度級上,G值出現的次數明顯高于R和B,說明綠色值點數多。由此表明識別的彩色圖像偏于綠色。
3.3 算法性能分析 昆蟲識別算法可以根據目標識別處理的層次進行區分。監測、分類和識別是目標識別性能的前3個層次。
目標監測:從傳感器數據中發現潛在目標是否存在的處理過程。
目標分類:區分目標類型的處理,即區分識別對象的類別,例如昆蟲是屬于哪一目哪一科。
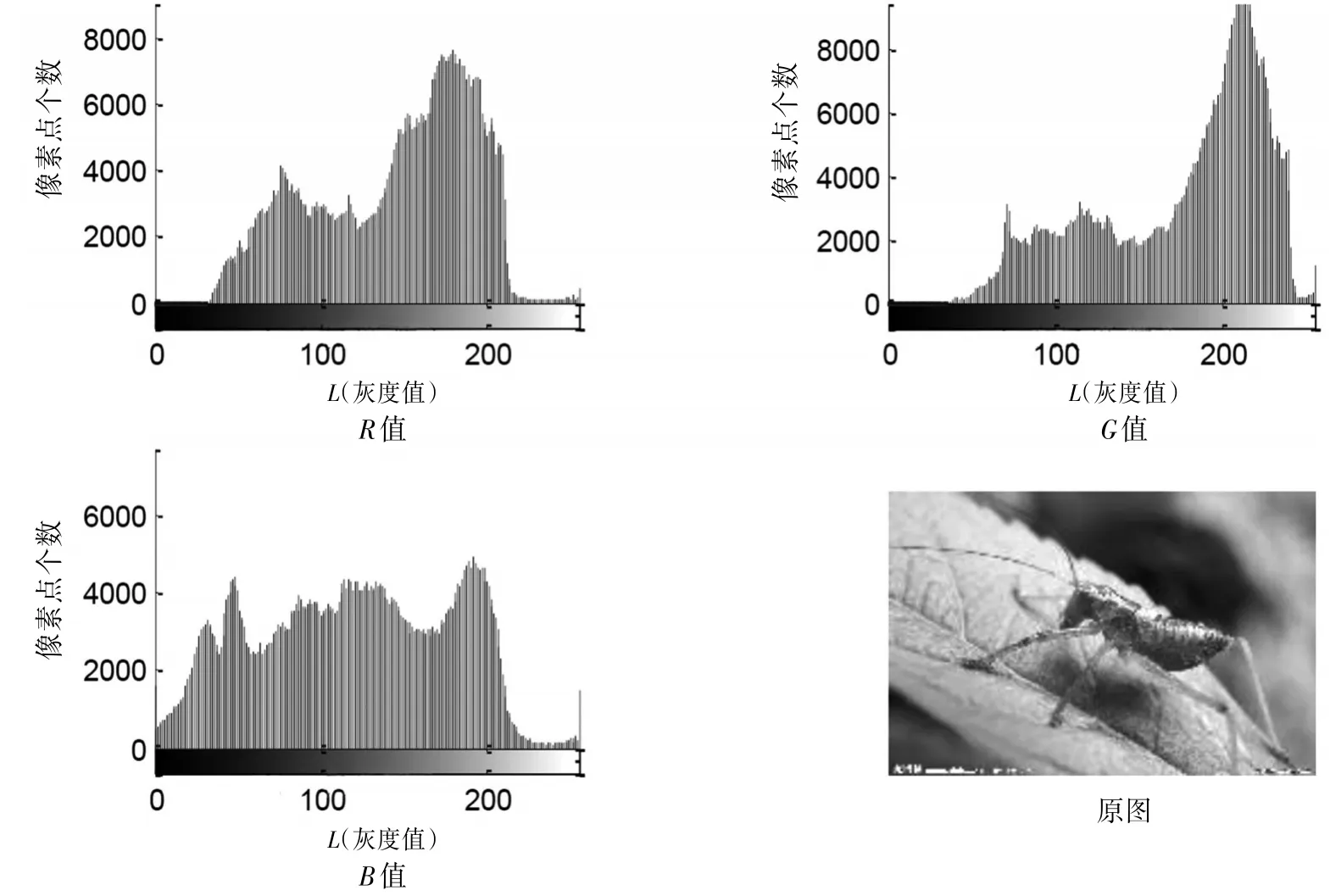
圖10 蟈蟈彩色圖像的R、G、B值
目標識別:在更高層次的給定目標類型中辨認出目標。就是在某一科或者某一種昆蟲中識別出具體是哪一種昆蟲。
已有的昆蟲圖像分割技術,都是根據昆蟲的圖像進行特征的提取,再通過分類算法、ID3決策樹方法、邊緣監測算子、相關反饋方法等算法進行昆蟲的識別和分類〔13-14〕。故本文對相關反饋方法、圖像邊緣監測算法以及本文智能昆蟲識別算法3種昆蟲識別算法進行時間復雜度和空間復雜度比較分析,以發現算法在時間和空間上的效率。
3.3.1 時間復雜度 算法的時間復雜度即一個算法執行所消耗的時間,一個算法花費的時間與算法中語句的執行次數是成正比的,一個算法中的語句執行次數稱為時間頻度或語句頻度。所謂時間復雜度就是執行本次算法所需要的計算工作量。時間復雜度用O表示為

根據3種算法的運行時間,以頻度n作為自變量,時間t作為因變量,得出算法時間復雜度比較,見圖11。

圖11 算法時間復雜度比較
由圖11可見:智能昆蟲識別算法的時間復雜度是最小的。在時間上驗證了智能昆蟲識別算法的優越性。
3.3.2 空間復雜度 與時間復雜度類似,空間復雜度是指算法在計算機內執行時所需存儲空間的度量。算法執行期間所需要的存儲空間包括3個部分:算法程序所占的空間、輸入的初始數據所占的存儲空間、算法執行過程中所需要的額外空間。算法的空間復雜度用O′來表示為

根據3種算法的程序占用空間即使用的資源,以頻度n作為自變量,使用資源作為因變量,得出算法空間復雜度比較,見圖12。
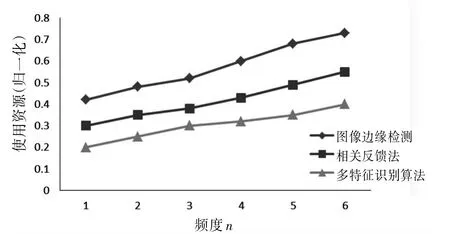
圖12 算法空間復雜度比較
由圖12可見:智能昆蟲識別算法的空間復雜度是最小的,即程序占用存儲空間是最少的。在空間上驗證了智能昆蟲識別算法的優越性。
4 結論
本文基于單片機和無線傳感器,將傳感器模塊嵌入單片機,利用傳感器網絡成本低廉、部署方便以及靈活的特點,根據昆蟲的紅外、聲音、顏色等特征設計了基于多特征昆蟲智能識別與監測系統,通過時間復雜度和空間復雜度驗證了算法的可行性和智能化。
該昆蟲智能識別與實時監測系統目前已應用于國家自然科學基金“洱海濕地昆蟲群落普適生境網絡生態行為研究”項目昆蟲智能采集中。實驗基地分別設在洱海月濕地公園、羅時江濕地、洱源東湖濕地3個濕地,可識別出典型的直翅目、革翅目、鞘翅目等昆蟲種群。但昆蟲識別準確率還有待大量應用測試與統計分析。
〔1〕劉璇.不同誘捕技術對鞘翅目誘捕效果比較及昆蟲多樣性研究〔D〕.哈爾濱:東北林業大學,2015.
〔2〕任瑩瑩,匡紅梅.人臉監測與識別綜述〔J〕.科技廣場,2009(9):114-115.
〔3〕林明江,安玉興,管楚雄,等.害蟲誘捕器的研究與應用進展〔J〕.廣東農業科學,2011,38(9):68-71.
〔4〕徐源浩,齊煥芳.基于ELM理論的昆蟲分類〔J〕.電子科技,2015,28(3):33-37.
〔5〕余俊霖.昆蟲實時捕捉、監測與死亡時間診斷的研究〔D〕.杭州:浙江大學,2014.
〔6〕孫衛偉,田懷軍,余小平,等.一種昆蟲跟蹤裝置:重慶,CN102630644A〔P〕.2012-08-15.
〔7〕胡逢付,吳少虹,陳岳平.慶元松源溪濕地昆蟲資源調查初報〔J〕.林業科技情報,2016,48(4):40-43.
〔8〕賈克鋒,童翠姣,徐志宏,等.衢州烏溪江國家濕地公園昆蟲調查及區系分析〔J〕.浙江林業科技,2015,35(3):61-67.
〔9〕賈克鋒,童翠姣,徐志宏,等.烏溪江國家濕地公園昆蟲種類調查和種群多樣性分析〔J〕.浙江林業科技,2015,35(5):76-79.
〔10〕和秋菊,易傳輝,楊宇明,等.云南高原水生昆蟲研究概況〔J〕.西南農業學報,2012,25(1):314-317.
〔11〕劉璇,胡春祥,曹傳旺,等.3種植物源引誘劑對鞘翅目甲蟲引誘效果比較〔J〕.林業科學,2016,52(10):153-160.
〔12〕竺樂慶,王鴻斌,張真.基于Mel倒譜系數和矢量量化的昆蟲聲音自動鑒別〔J〕.昆蟲學報,2010,53(8):901-907.
〔13〕王江寧,紀力強.昆蟲圖像分割方法及其應用〔J〕.昆蟲學報,2011,54(2):211-217.
〔14〕蘭紅,王璇.基于多元線性回歸的昆蟲圖像分割方法〔J〕.計算機應用與軟件,2013,30(7):193-196.
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
