無碼變頻鉆井泵及其控制系統研究
2018-06-14 03:42:08龔治濱楊硯杭陳湘陵朱奇先
電氣傳動自動化 2018年3期
關鍵詞:變頻器
龔治濱,楊硯杭,陳湘陵,朱奇先
(1.渤海鉆探第五鉆井公司,河北河間062450;2.中國石油渤海鉆探第四鉆井公司,河北任丘062550;3.西部鉆探克拉瑪依鉆井公司,新疆克拉瑪依834009;4.天水電氣傳動研究所有限責任公司,甘肅天水741020)
1 引言
鉆井泵為鉆機的必配裝備,常規變頻鉆機配置中,泥漿泵大多是由單臺變頻器拖動,采用無編碼器速度控制。從控制結構上來說簡單、方便。但隨著鉆井泵功率的增加,在綜合考慮成本、性價比等因素下,選擇兩臺變頻器來拖動是比較好的解決方案。本文就鉆井泵電機及其拖動裝置的選擇原則以及在控制方法上應注意的幾個問題進行論述,以供相關人員參考。
2 鉆井泵
鉆井泵種類較多,功率等級的規格也很多,對不同的鉆機和鉆井要求有不同的配置。4000m以上的變頻鉆機大多配置 2 臺或更多的 F-1600/1600L/1600HL 型鉆井泵[1],其技術參數見表 1、2[2]。
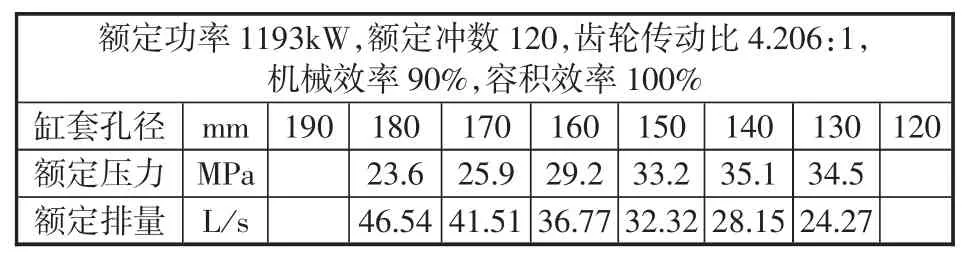
表1 F-1600/1600L 鉆井泵技術參數

表2 F-1600HL鉆井泵技術參數
3 電機及變頻裝置選型
鉆井泵的輸出功率P2由下式計算:

與其輸入功率P1之間的關系為:

其中 p 為額定壓力 MPa,Q 為排量 L/s,η2為容積效率,在上述鉆井泵中 η2=0.9。對應 F-1600L,F-1600HL,在同一傳動比和額定120沖時,其輸出功率對比見表3.

表3 F-1600L/HL 輸出功率對比
由上表計算可見,鉆井泵的額定功率指其輸入功率,只要輸入功率相同,無論高低壓泵,需要拖動電機的功率是相同的。因此拖動電機選型的第一個要求,是額定輸出功率應不小于鉆井泵的輸入功率。其次需要確定電機的額定速度。對于鉆井泵,根據額定沖數n3、齒輪傳動比i可以計算輸入轉速n2為:

對于直驅鉆井泵,這個速度就是電機的額定輸出速度,對應的直驅扭矩T2為:

對于通過皮帶驅動的鉆井泵,需要根據皮帶的規格以及拖動電機的安裝位置確定電機的額定速度,當確定電機的額定速度n1為1000rpm時,需要的額定扭矩為:

此時的皮帶傳動比為:

由于在確定的額定電機速度(對應額定電壓)下,扭矩與輸入電流成比例,而輸入電流須由變頻裝置提供,因此過高的扭矩要求不利于變頻裝置和電纜的選擇,推薦在相同功率下,盡量選用高速電機。例如當電機的額定速度選為1500rpm時,需要的額定扭矩為:

皮帶傳動比為:

兩相比較,后一種更容易選擇變頻裝置,但后一種變比能否實現,則取決于從電機輸出軸到鉆井泵輸入軸之間變比的合理匹配。對于功率因數 cosφ=0.88,傳輸效率 η1=0.95 的常規單機變頻電機來說,需要的額定輸入電流(額定輸入電壓U1=600V)I1為:

亦即變頻裝置最小的額定輸出電流;對于雙機拖動的變頻裝置,單臺裝置的額定輸出電流為總電流一半再加5%。綜上所述,拖動電機功率的選擇根據鉆井泵功率,速度取決于直驅還是間驅;根據確定的電機速度(對應電壓/頻率)和傳輸效率及功率因數選擇變頻裝置的額定輸出電流和恒功率V/f點。
4 控制方式
鉆井泵為鉆機工作時提供穩定的具有一定壓力的泥漿流量,對其輸出特性的要求為:在設定的沖數下,能夠自動、快速地抗擾泥漿壓力變化而保持沖數不變。與此對應,變頻裝置應運行在恒轉矩變速控制模式上,即轉矩內環和轉速外環的雙閉環無差控制,內環的轉矩給定來自轉速外環的輸出,轉矩實際值通過檢測電機實際扭矩獲取;外環的速度給定來自工作指令,速度實際值通過檢測電機的實際速度獲取;內外環控制器均采用比例(P)積分(I)無差調節器。這些功能要求在變頻器上屬于標準配置,只須正確使用即可。電機實際扭矩(對應泥漿壓力)的獲取方法很多,普遍的做法的是通過檢測變頻器輸出電流根據算法模型間接獲取,精度很高,已可滿足使用要求;需要注意的是實際速度的獲取方式,雖然采用速度編碼器直接測量最為準確,但考慮到鉆機工作的實際環境以及其他方面的要求,這種方式實際不易實施,不如采用間接計算獲取更為實用可靠。總之在實際應用中,絕大多采用的是無速度編碼器的矢量或者轉矩控制模式,基本能夠完全滿足鉆井泵的要求。
5 存在問題及解決措施
5.1 靜態扭矩
采用上述控制方式,當設定速度低于參考額定頻率的5%以下時,速度閉環自動切換到開環方式,控制性能下降,電機處于不受控制的抖動狀態,忽而正傳,忽而反轉。給定零泵沖換鉆桿即是這種工況。為避免這種情況產生意外后果,通常用增大靜態輸出扭矩進行抑制,為使抑制效果明顯,變頻器一般對此設置較高,默認為額定扭矩的80%甚至更高。但在上述工況下,這種設置將使變頻器工作狀況隨時間的延長嚴重惡化,而時間的長短決定于換鉆桿時的鉆井工藝,最長可能到10min~30min。這將導致功率器件IGBT或IGCT嚴重過熱、極易損壞,可能會大幅增加運行成本,影響鉆井效率!解決方法是規定操作程序,換桿時必須停機;同時壓低靜態扭矩設置到額定的30%或以下。
5.2 扭矩均衡
當用雙機雙變頻器拖動時,無論轉矩控制還是矢量控制,均以準確的轉子轉速為基準,輔以合理的主從控制結構,很容易做到雙機間扭矩均衡,轉速穩定。以編碼器檢測實際速度的話,這個設想的實現非常容易。對于無測速編碼器情況,轉子位置和速度計算沒有了共同的基礎,加上雙機間調節過程不可能完全同步,最終結果將使兩機間在同一轉速下扭矩大小相差懸殊,甚至方向相反,造成軸上扭矩處于振蕩狀態。扭矩對時間的積分形成轉速,因此振蕩的扭矩必然導致振蕩的轉速,使鉆井泵無法正常工作。為解決這個問題,采取的第一個措施是兩機間控制結構上相互獨立,每機V/f控制。試驗的結果為速度扭矩同時振蕩,而且隨著泵壓負載的增大振動加劇直至變頻器故障停機;在第一個措施上加強聯系,增加主從控制通道,各機仍然采用V/f控制,經過試驗,效果沒有改觀;再在第二方案上將控制器改為比例調節,經過試驗,可以同步運行,扭矩有小幅震蕩,但在泵負載增加時,泵沖下降明顯,負載變化時,泵沖達到穩定過程的時間相當長,這種情況在實際上無法使用。經過對變頻器控制過程和故障現象的深入分析,大體上找到了問題所在。原來變頻器在調節運算中,始終監視設定速度和實際速度,正常工作時,由于數字運算速度很快,在外部機電大慣性時間常數下,速度設定基本上等于實際速度,兩者相差很小。當產生扭矩振蕩時,電流變化劇烈,以此為輸入快速計算出的速度與電流同步的劇烈變化,振蕩幅度和持續時間遠遠超過了允許的最大范圍,變頻器為保護自身和相關設備,必然要做出故障停機動作。為消除這個問題,經過進一步分析發現,造成扭矩振蕩的原因是速度調節器的輸出,扭矩調節器的輸入,關鍵是其中的積分量增大過快,實際速度由于要經過大慣性的機電時間延遲后才反映到轉速上,而調節器按照固有的運算速度很快的輸出了要求加速的扭矩,綜合后必然使調節器振蕩。如果將快速增長的積分量的一部分作為速度調節器的反向信號輸入到速度調節器,將抵消一部分加速扭矩及其快速變化,進而消除振蕩。因此以主從控制結構,用速度調節器部分積分量反向疊加組成的雙環控制系統,經過現場實際驗證,取得了兩機速度平穩,扭矩相差最大在額定的5%以下的優良性能指標,完全達到了實際現場的使用要求!
6 結束語
變頻泥漿泵配置電機時,只要輸入功率確定,沒有高壓泵和低壓泵區分,需要的拖動電機功率相同;在確定的功率下,高速電機比低速電機取用的電流小,較小的電流易于選用變頻器和傳輸電纜;控制結構一般為無測速傳感器的轉速扭矩雙閉環無差恒轉矩控制系統;在使用中要盡量避免5%額定速度以下的區段;對于雙機拖動同一硬性連接軸的應用,除去用在5%額定速度以下區段外,還須采用主從控制結構以保證扭矩均衡,同時還要采取措施降低加速扭矩,設法使雙機間扭矩誤差在設定范圍內。做好以上工作后,雙機拖動的無編碼器鉆井泵性能完全可以和有編碼器的相媲美,并且更為可靠、易用!
猜你喜歡
消費電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(2021年3期)2021-08-13 08:39:56
防爆電機(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測控技術(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測試(2017年23期)2017-04-04 05:07:32
自動化博覽(2014年12期)2014-02-28 22:34:39
自動化博覽(2014年10期)2014-02-28 22:33:52
