基于PR的無刷直流電機控制技術*
2018-06-14 03:42:12陸嘉鑫朱明祥張凱龍包水臣
電氣傳動自動化 2018年3期
陸嘉鑫,朱明祥,張凱龍,包水臣
(南京師范大學泰州學院電力工程學院,江蘇泰州225300)
1 引言
無刷直流電機(BLDCM)廣泛應用于各個領域。理想的BLDCM反電勢為120°平頂的梯形波,輸入方波電流后可產生恒定轉矩,但實際的BLDCM反電勢波形不是規則的梯形波,也不是正弦波,其轉矩系數隨轉子位置角的變化而改變,通以方波電流時會產生低頻轉矩脈動。并且,BLDCM采用兩相導通模式控制換相時,存在換相轉矩脈動[1]。采用電壓空間矢量脈寬調制(SVPWM)策略進行調速控制,具有轉矩脈動小和調速范圍寬等優點。但是BLDCM在運行過程中電流矢量控制中交叉耦合項無法完全解耦,導致系統控制精度下降,同時也會出現輸出轉矩脈動的現象。
BLDCM具有較小的轉動慣量,因而對電流控制性能要求很高。文獻[2]提出采用基于狀態反饋的電流預測控制法,可以有效地提高電流環動態性能進行提高輸出轉矩的穩定性,但缺點是控制器實現起來比較復雜。文獻[3]提出了一種比例諧振控制器的改進策略,能夠實現對輸入信號的無靜差跟蹤,同時能抑制低次諧波以及指定次諧波的干擾。
本文提出一種基于比例諧振(Proportional Resonant,PR)控制的BLDCM調速方案,與傳統電流控制算法相比,前者不含前饋補償項和解耦項,減少了坐標旋轉,進而減小控制算法的實現難度,減小輸出轉矩脈動。利用MATLAB軟件模擬出基于PR控制的BLDCM調速方案的運行狀態,驗證該方法的正確性與有效性。
2 無刷直流電機數學模型
無刷直流電機(BLDCM)由定子三相繞組、永磁轉子、逆變器、轉子磁極位置檢測器等組成。相關近似等效后,三相定子變量數學模型為[4]-[5]:

式中:ua,ub,uc為定子三相電壓;R 為三相繞組電阻;ia,ib,ic為三相電流;p為微分算子;LS為三相定子電感;LM為三相繞組之間互感;ea,eb,ec為三相反電勢。
當 ia+ib+ic=0 時,令 L=LS-LM。將其代入式(1),整理得:

電磁轉矩方程可表示為:

式中:ω 為 BLDCM 的角速度(rad/s)。
BLDCM反電勢為梯形,如圖1所示,現以A相反電勢ea為例推導三相反電勢數學模型:
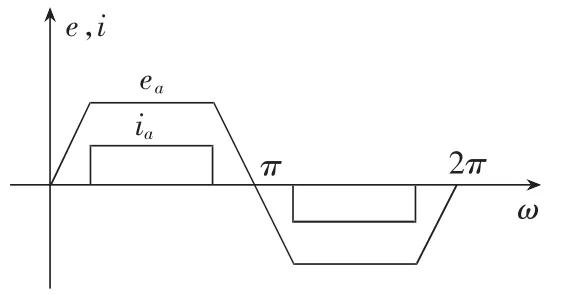
圖1 A相反電勢和電流波形
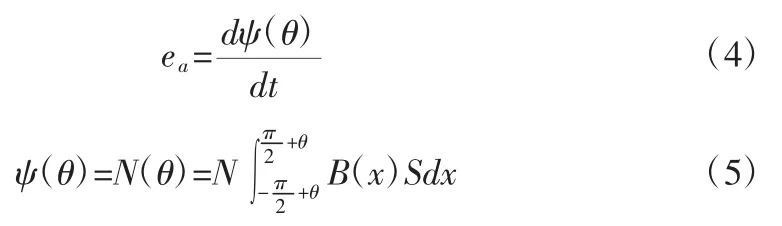
式(4)中:ψ(θ)為A相繞組的永磁磁鏈;θ為轉子位置角,如圖 2(a)所示;式(5)中:φ(θ)為 A 相繞組磁通;N 為A相繞組匝數;S為繞組在定子內徑表面圍成的面積;B(x)為沿x軸承梯形分布的轉子永磁體徑向氣隙磁密,B(x)周期為 2π,同時滿足 B(x+π)=-B(x)。結合式(4)、(5)可得:

式中:ωr為轉子角速度;ψm=2NSBm,為A相繞組磁鏈幅值;fa(x)=B(x+π/2)為A相幅值為1的單位反電勢。
假設電機氣隙磁場為標準的梯形波,平頂寬度為120°,則磁密分布B(x)的具體數學模型為:
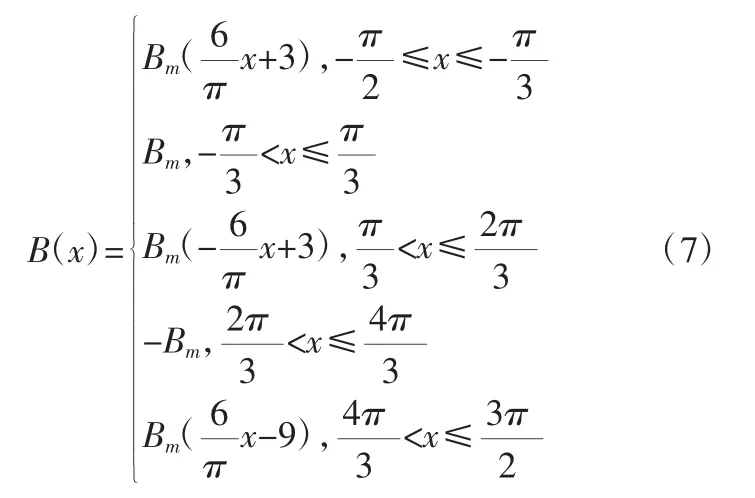
式中:Bm為B(x)磁通分布中120°平頂對應的磁通幅值,具體如圖 2(b)所示:
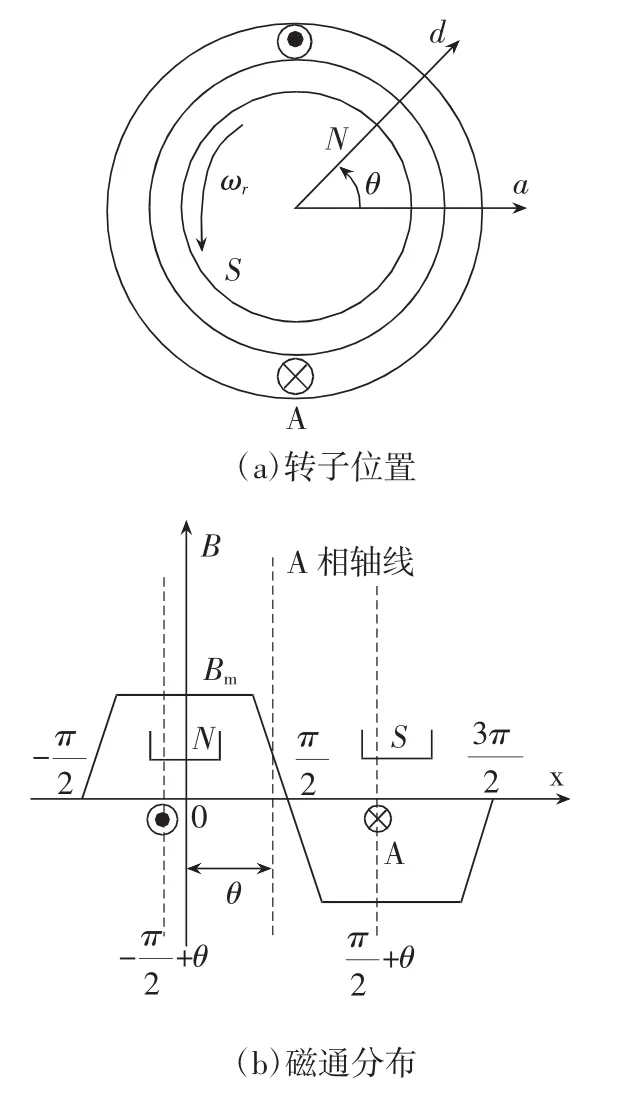
圖2 A相繞組位置及磁通分布
同理可得,B相與C相的反電勢數學模型為:
根據Clark和Park變換及其逆變換,可將三相靜止坐標系下定子電壓變量轉換成同步旋轉坐標系下的d、q電壓分量:
d-q坐標系下轉矩公式為:

上式即為BLDCM在矢量控制下的轉矩公式,比常規的永磁同步電機矢量控制的轉矩公式更加復雜。在矢量控制系統中,若采用id=0的控制方式,上式可化簡為:
3 比例諧振控制原理
對控制系統,PI控制器可以實現零穩態誤差,其傳遞函數為[6]:

對被控量為交流信號的控制系統,其同步旋轉坐標系下PI等效的比例諧振(PR)控制器傳遞函數為:

式中:ω0為諧振頻率,Kp為比例增益,Ki為積分增益。當給定交流信號的角頻率為ω0時,GPR(s)的幅值為:

在實際中,使用一種改進的準PR控制器,其傳遞函數為:

式中:ωc為準諧振控制的截止頻率。
式(14)的傳遞函數為s函數,采用PR控制對BLDCM系統進行數字控制時,對諧振控制器進行離散化,其實現可以使用雙線性變換,公式為:

將式(17)代入式(14),可得:

式(17)中:Ts為采樣周期,式(18)中:
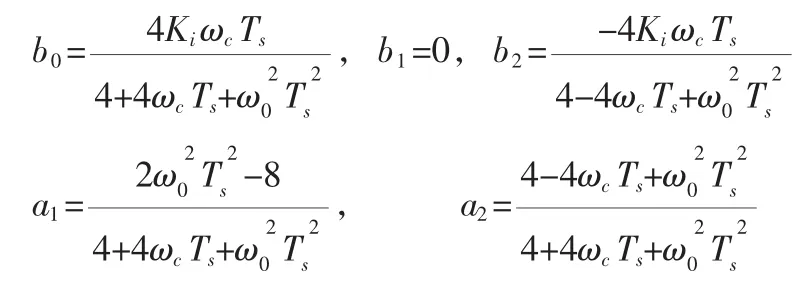
整理后得到控制器的差分方程為:

4 永磁無刷直流電機系統設計
4.1 比例諧振控制器框圖
由式(19)的差分方程可建立系統控制框圖中的比例諧振控制器,其MATLAB實現框圖如圖3所示。
該框圖中,b0、b1、b2、a1和 a2的值與表達式已給出,其中ωe為電機機械角速度,其與諧振頻率一致;error為兩相靜止坐標系下的定子電流分量的給定值和與測量值iα和iβ進行做差比較的結果,該框圖的輸出可對電流進行接近無差的跟蹤調節。圖中z-1為延遲(delay)環節,可將輸入信號延時一個采樣周期再進行輸出;z-2也是延遲(delay)環節,其將輸入信號延時兩個采樣周期再進行輸出。
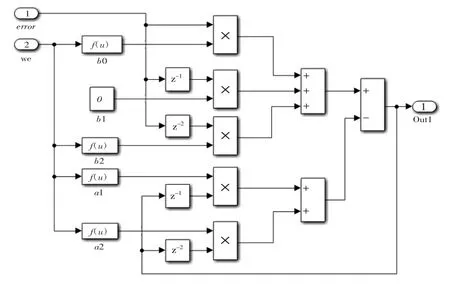
圖3 諧振控制器框圖
4.2 比例諧振控制系統框圖
本文設計一種基于PR控制器的BLDCM矢量控制策略,其系統控制框圖如圖4所示。
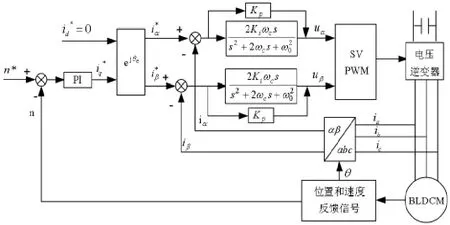
圖4 基于PR控制器的無刷直流電機系統控制框圖
對比傳統PI控制方法可以看出,基于PR控制器的控制系統不含與電機參數有關的前饋補償項和解耦項,減小控制算法實現的難度,提高控制系統的魯棒性。
5 比例諧振控制系統仿真分析
利用MATLAB建立無刷直流電機控制系統的仿真模型[7]。采用基于比例諧振控制策略進行矢量控制。仿真時間設置為 0.1s,系統采樣時間設置為 0.00001s,電機和實驗的參數見表1。
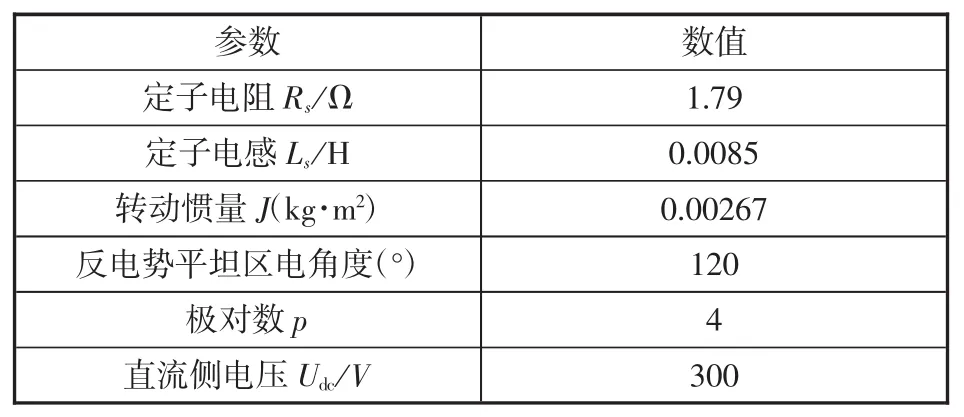
表1 無刷直流電機模型和實驗參數
5.1 實驗一:輸出轉矩穩定性實驗
此實驗的主要目的是將本文所提出的比例諧振控制策略與傳統PI調節器控制策略進行對比,來驗證比例諧振控制策略的輸出轉矩穩定性。
此實驗中,兩個策略都進行了0.1s的仿真。第一次進行傳統PI調節器控制策略調速方案,在t=0s時,給定負載轉矩為0,即讓電主軸空載啟動運行,給定轉速為1500r/min。當轉速穩定之后,輸出轉矩為0,但其穩定時輸出轉矩抖動較大且抖動頻率較高,說明該策略在穩態運行時,電機輸出轉矩不夠穩定。第二次進行比例諧振控制策略,在t=0s時,給定負載轉矩為0N·m,給定轉速為1500r/min,當電機轉速穩定后,其輸出轉矩為0,轉矩波動明顯減小。之后進行帶負載的實驗,實驗給定數據同前兩次所述,在t=0.05s時給定負載轉矩 11 N·m,電機的電磁轉矩在 t=0.05s時,增加到11N·m,并且基于比例諧振控制策略的輸出轉矩比傳統PI調節器控制策略輸出轉矩穩定。此實驗說明:基于比例諧振控制策略的方案在輸出轉矩穩定性上,無論是空載運行還是帶負載運行,都要優于傳統PI調節器控制策略。基于傳統PI調節器控制的無刷直流電機的調速策略空載輸出轉矩如圖5所示,帶負載時的輸出轉矩如圖7所示,其局部放大圖如圖8所示;基于比例諧振控制的無刷直流電機調速策略空載輸出轉矩如圖6所示,帶負載時的輸出轉矩如圖9所示,其局部放大如圖10所示。
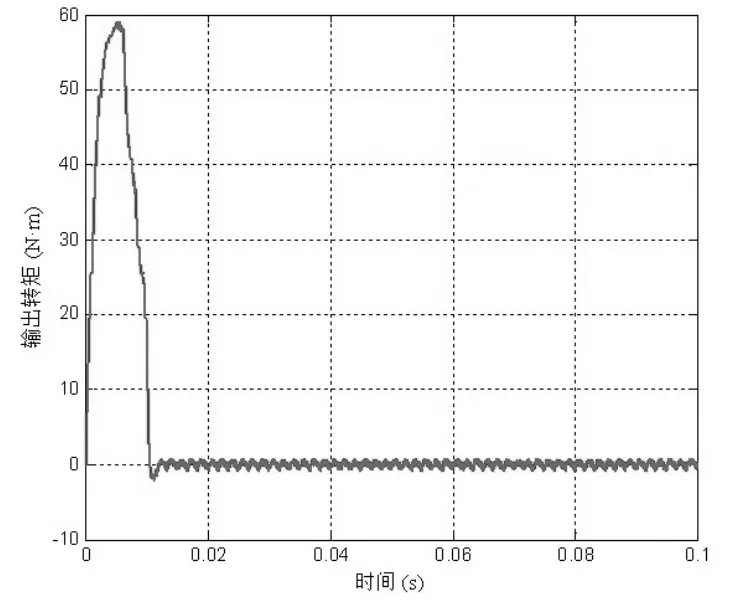
圖5 傳統PI調節器控制空載輸出轉矩圖
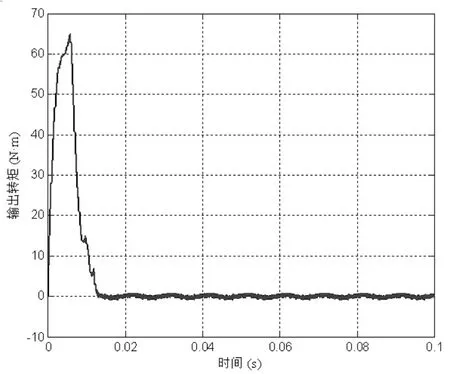
圖6 比例諧振控制空載輸出轉矩圖
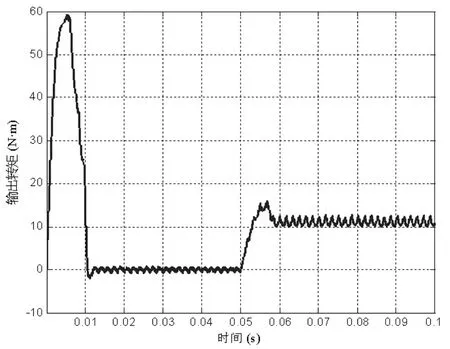
圖7 傳統PI調節器控制帶載輸出轉矩圖
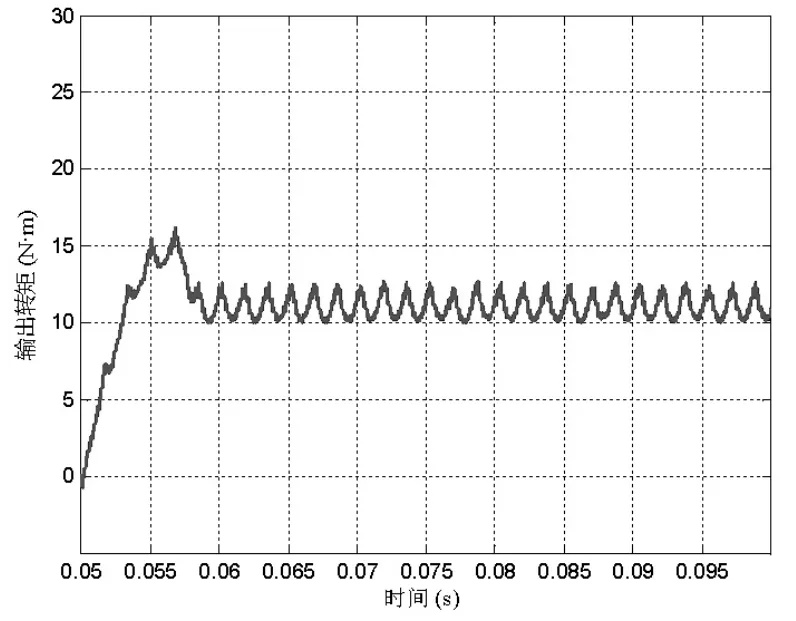
圖8 傳統PI控制局部放大圖
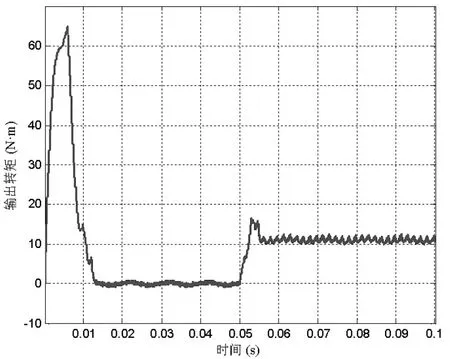
圖9 比例諧振控制帶載輸出轉矩圖
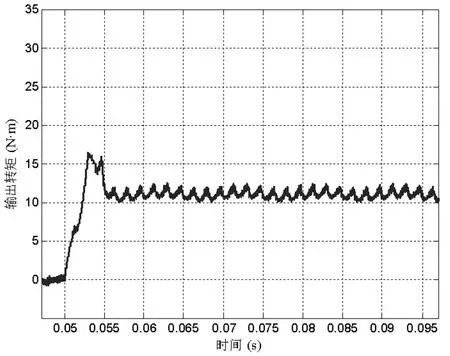
圖10 比例諧振控制局部放大圖
5.2 實驗二:帶負載實驗
此實驗的主要目的是將本文所提出的比例諧振控制策略與傳統PI調節器控制策略進行對比,來驗證比例諧振控制策略在帶負載時的轉速跟蹤性能。
此實驗中,首先對傳統PI調節器控制策略進行實驗。在 t=0s時,給定轉速為 1500r/min,在 t=0.5s時,給定負載轉矩11N·m,當轉速再次穩定時,其穩態轉速已經無法達到給定轉速。第二次進行比例諧振控制策略的實驗,初始條件同前所述,由實驗結果可知,在此實驗中兩種策略的上升時間基本一致,且都基本無超調。當t=0.5s時加上負載重新進入穩定的過程中,比例諧振控制策略在t=0.055s時就恢復再次達到給定轉速,而傳統PI調節器在t=0.057s才再次達到穩態轉速,故前者能更快的進入穩定運行,相比于傳統PI調節器,前者能對轉速實現無差調節,而后者在穩態時,轉速產生跌落,已無法達到給定轉速。并且后者的電流諧波總量(THD)為 80.79%,前者的 THD 為 64.72%,前者也明顯優于后者,減小THD也有利于增強電機的帶負載能力。
兩控制策略的輸出轉速響應如圖11所示,轉速局部放大如圖12所示。

圖11 轉速響應圖
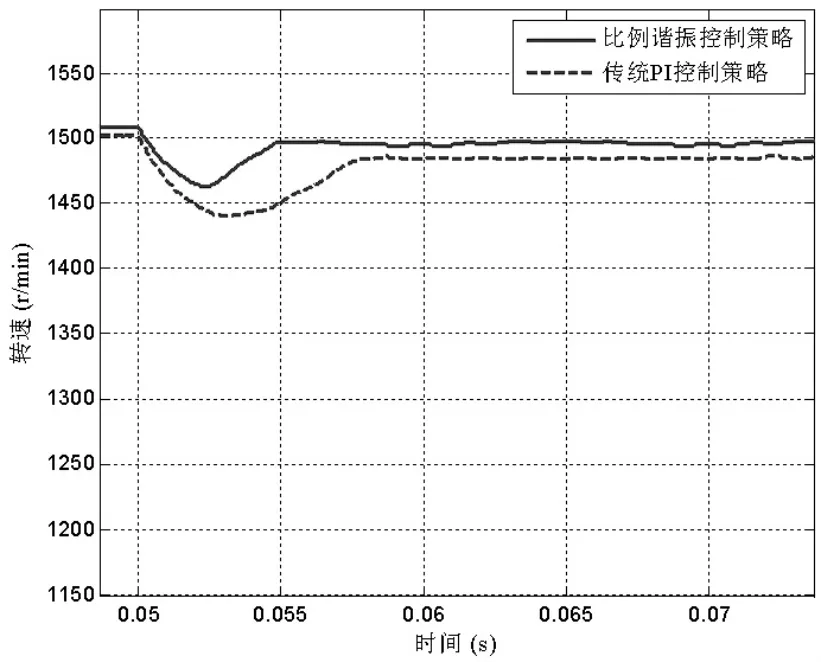
圖12 轉速響應局部放大圖
由上述兩個實驗可得,采用基于比例諧振控制策略的無刷直流電機調速方案相較于傳統PI調節器控制方案能使電機達到穩態時,輸出轉矩更穩定。同時在電機帶負載時,前者能無靜差的跟蹤轉速給定值,而后者已經無法實現無靜差調速,穩態精度沒有本文所提出的方案高,并且前者具有更小的電流諧波總量(THD)。
6 結束語
本文針對無刷直流電機輸出轉矩抖動和帶負載能力不強等現象,提出了一種基于比例諧振控制的無刷直流電機調速方案。采用該策略控制電機在穩態運行時,輸出轉矩具有更小的抖動頻率,同時還能在帶負載的情況下,實現無靜差調速。實驗結果也表明,在將系統的電流環調節器替換為PR控制器的情況下,電機的輸出轉矩抖動明顯減小;同時在帶負載能力上,基于比例諧振控制的方案也優于傳統PI調節器控制方案,能夠實現電機轉速的穩態無誤差的快速跟蹤。因此,無刷直流電機采用基于比例諧振控制的調速方法既提高了輸出轉矩的穩定性,也增強了系統的帶負載能力,仿真結果證明了其可行性與有效性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
