GNSS多系統動態精密單點定位性能分析
2018-06-13 10:36:46潘宇明丁樂樂孟凡效王震
全球定位系統 2018年2期
潘宇明,丁樂樂,孟凡效,王震
(天津市勘察院,天津 300191)
0 引 言
隨著中國北斗衛星導航系統和歐盟Galileo衛星導航系統的建設發展,以及GLONASS現代化,過去采用GPS單系統進行導航定位的技術已經逐漸過渡到了GNSS(Global Navigation Satellite System)多系統導航定位階段[1],GNSS各系統兼容、互操作與數據融合成為GNSS導航定位領域主要發展趨勢之一[2]。GNSS多系統較單系統數據冗余特性好,可顯著改善有遮蔽或者干擾情況下的導航定位效果,且擁有更好的完好性驗證,通過系統間比對能有效檢驗授時和定位精度[3]。多系統的發展可從根本上改變對某一系統的過分依賴,尤其是在戰爭等特殊環境下。精密單點定位(PPP)技術具有作業機動靈活、無需基準臺站、測站間不受距離限制,且觀測值不會因差分操作減少等優點[4]。使用單臺接收機即可直接獲得高精度的ITRF框架的三維地心坐標,大大節約了用戶成本,提高了生產效率[5]。近年來,PPP技術逐漸發展成為衛星導航定位技術領域的熱點研究方向之一,正蓬勃發展,顯現出了廣闊的應用前景。以IGS組織推動的多模GNSS實驗跟蹤網(MGEX)為契機,PPP進一步朝著多系統的方向發展。
近年來,國內外學者對多系統融合技術進行諸多研究并取得成果。Montenbruck介紹MGEX項目是跟蹤、整理和分析所有可用的GNSS信號[6]。李盼等在2014年采用GPS、GLONASS和北斗三個系統進行PPP定位[7],李星星于2015年開展了基于非差非組合模型的四系統集成的PPP研究,結果表明四系統組合可以明顯改善可見衛星數量、空間幾何構型,提高定位精度和收斂速度,提高導航和定位的連續性和可靠性,在觀測環境差時提高更明顯,并將多系統組合方法應用于水汽研究[8-9]。
本文在研究多系統融合PPP模型及其相關處理策略的基礎上,基于IGS MGEX跟蹤站觀測數據和機載動態數據,對單系統、雙系統組合、多系統融合PPP的動態定位精度、收斂速度進行比較分析,并在不同高度角閾值下對動態PPP進行仿真。
1 非差精密單點定位原理
接收機r所接收到的來自衛星s的偽距和相位觀測值可表述為[4-5]
(1)
(2)
式中:上標G為某一衛星系統(GPS/GLONASS/

為了消除式(1)、式(2)中電離層延遲誤差的影響,一種方法是采用兩個頻率上的觀測值形成無電離層組合模型:
(3)
(4)
(5)
(6)

本文兼顧定位精度和計算效率,采用經驗的三角函數高度角定權,根據參考文獻[8]的研究結果,GPS和Galileo信號質量較好,使其偽距權較GLONASS和BDS的大一倍,對于相位觀測值采取四個系統等權方法。這種方法能較好地描述多系統觀測值之間的權比,而且不用迭代,提高了運算效率。對于偽距和相位觀測值權比問題,傳統的PPP隨機模型一般將其設置為1∶100,本文根據偽距和相位的噪聲比值采用自適應的偽距和相位權比。針對BDS系統不同星座,因為GEO衛星軌道精度較差,在實驗時適當提高MEO和IGSO衛星信號的權比,降低GEO衛星信號的權比。
采用擴展卡爾曼濾波進行參數估計,待估參數為測站坐標、接收機鐘差、天頂對流層濕延遲、各個衛星的模糊度參數等[11]。對流層濕延遲的隨機模型采用隨機游走模型,測站坐標隨機模型在動態定位時采用白噪聲模型,接收機鐘差采用白噪聲模型,模糊度參數在連續弧段內作為常數,發生周跳時采用白噪聲模型。
衛星軌道和鐘差采用GFZ的MGEX精密軌道和精密鐘差。衛星端和接收機端相位中心偏差(PCO)和天線相位中心變化(PCV)采用IGS發布的產品進行改正。目前IGS只提供BDS和GALILEO衛星端PCO,尚未提供接收機端的PCO和PCV,因此在處理BDS和GALILEO系統時只進行了衛星端PCO改正[11]。同時,也考慮了極移、固體潮、海洋潮等改正。
2 實驗結果分析
2.1 靜態模擬動態PPP實驗
本文選取了7個MGEX測站從2016年2月14日至2016年2月20日7天的數據,觀測值采樣率是30 s,利用自主研發的PPP解算程序進行模擬動態PPP解算。這7個測站的基本信息和分布情況如表1所示。采用精密鐘差中的測站坐標作為參考值,可以準確計算出各歷元坐標估值的偏差。本文采用位置偏差均方差(RMS)來表征定位精度,并統計各測站定位偏差的水平分量優于0.1 m且垂直分量優于0.2 m時所需要的觀測時長,作為收斂時間指標。
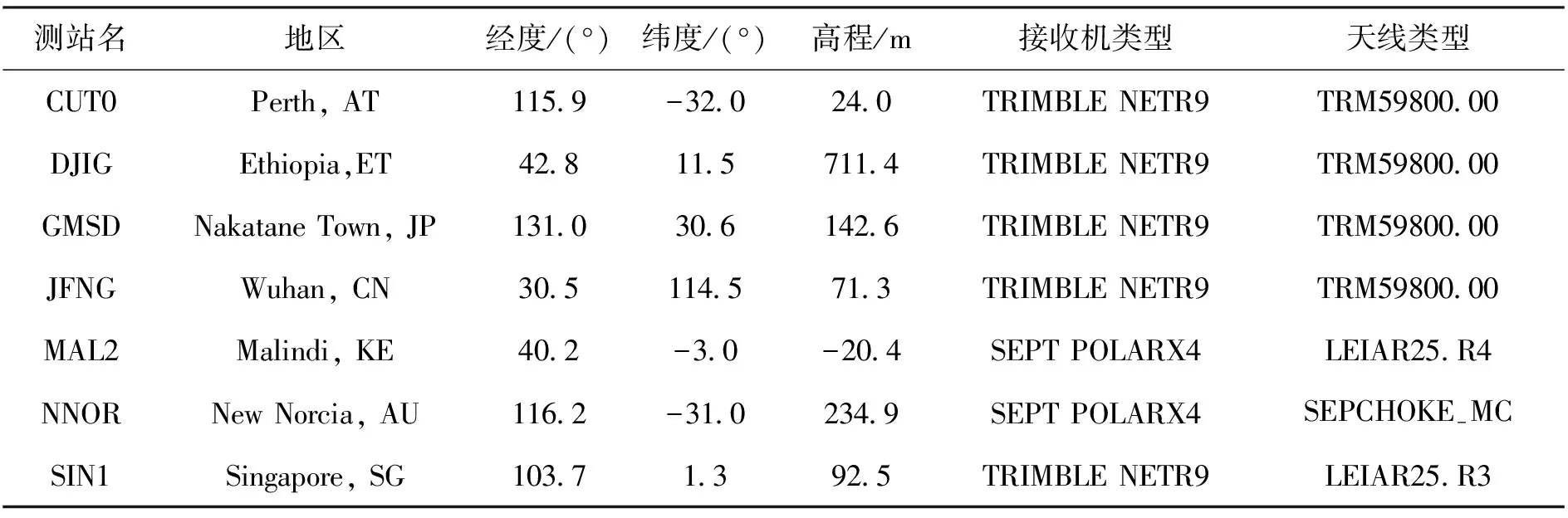
表1 實驗選取MGEX站基本信息
圖1示出了CUT0站采用不同系統的動態PPP定位結果,即單天解RMS的均值,其中左圖表示BDS、GLONASS和GPS單系統PPP定位結果,從圖中可以看出BDS單系統PPP定位精度最低,在水平方向能達到0.2~0.4 m,垂直方向RMS在0.5 m以上,造成這種精度較差的原因有: 1) BDS衛星軌道的精度較低;2) BDS信號噪聲較大;3) BDS衛星內部多路徑等原因造成的偽距偏差未改正;GPS結果精度最高,平均RMS值在5 cm以內。右圖分別表示GPS+BDS、GPS+GLONASS雙系統PPP和四系統PPP的組合定位結果,可見GPS+BDS雙系統組合定位結果RMS均值約為東方向1.5 cm,北方向1 cm,上方向2.5 cm,GPS+GLONASS精度稍好于GPS+BDS組合,其在E、N、U三個方向的精度約為1.3 cm、0.8 cm和2.3 cm,四系統組合動態PPP的精度最高,三個方向RMS均值約為0.7 cm、0.6 cm和1.7 cm.由此可以得出結論,多系統組合的動態PPP定位精度要高于單系統和雙系統PPP.
為了顯示四系統組合PPP的優越性,本文分析了不同截止高度角情況下的單系統和多系統動態PPP精度,圖2示出了CUT0站(DOY047)在不同截止高度角下的PPP動態定位偏差序列,淺色的線條表示GPS單系統PPP結果,深色的線條表示四系統組合PPP結果,從左至右依次是截止高度角10°、20°和30°.發現當截止高度角增大時,GPS單系統PPP的精度和可靠性顯著降低,當截止高度角增大到30°時,GPS單系統PPP將不能提供連續的精密定位結果,得到的坐標可靠性和精度降低。但是多系統組合PPP的定位精度卻沒有隨著高度角增大而明顯減小,即使截止高度角增大到30°,多系統PPP在水平方向的精度依然能達到一定要求,提供連續的精密定位結果。多系統組合PPP精度雖然會隨著截止高度角增大而在一定程度上逐漸降低,但是相較于單系統PPP精度依然很高。
圖3示出了其中7個測站采用不同系統的動態PPP平均收斂時間。從圖中可以看出BDS單系統動態PPP收斂時間最長,一般需要4 h以上的收斂時間,明顯長于GPS PPP和GLONASS PPP.且對比2.1節中的靜態PPP收斂時間,可以看出在相同條件下,動態PPP收斂時間明顯長于靜態PPP,這是由于動態PPP待估參數更多,模型強度比靜態PPP要弱的原因所致。
從圖3中還可以看出,對大多數測站,GPS+GLONASS PPP動態解平均收斂時間在20 min左右;GPS+BDS平均收斂時間約為30 min.所有測站,GPS+GLONASS 動態PPP收斂時間要短于GPS+BDS 動態PPP.所有測站四系統動態PPP的收斂時間不超過40 min;大部分測站其收斂時間約為10~20 min左右。可見四系統組合PPP動態模型的收斂時間最短。
2.2 機載動態PPP實驗
為了更為全面地評估多系統PPP程序的動態定位性能和精度,本文采用機載數據進行實時動態定位的實驗,該機載數據算例開始時間為2015年4月25日21點22分41秒,終止于2015年4月26日3點46分27秒,時長約為5 h,采樣率為1 Hz,接收機采用NovAtel GPSCard板卡,同時接收GPS、GLONASS、Galileo和BDS雙頻的數據。飛機的飛行軌跡如圖4所示。
對上述機載數據分別進行單系統、雙系統和多系統動態PPP解算,以GrafMov動態基線處理結果為參考坐標。GrafMov是加拿大專業GPS軟件公司開發的GPS/GLONASS事后處理軟件包,它包括GPS動態和靜態數據處理軟件,可以非常方便地選擇組合方式進行數據處理,得到厘米級的定位精度,同時增加了動態基線的處理功能。本文將已知坐標的地面基站作為參考站,采用GrafMov獲得地面基站和機載接收機基線坐標,繼而獲得機載接收機坐標,并將最終的坐標偏差轉換到E、N、U方向,對偏差進行精度統計。圖5示出了該算例計算結果,圖6示出了采用不同系統組合的動態PPP精度。從上面兩幅圖可以看出,在單系統PPP中,GPS精度最高,GLONASS次之,都能達到分米級,而BDS單系統PPP精度不如GPS和GLONASS,只能達到米級的精度。雙系統PPP精度較單系統PPP都有提高,其中GPS+GLONASS雙系統PPP的精度優于GPS+BDS雙系統PPP的精度。GPS+GLONASS+BDS+GALILEO組合PPP的精度最高,優于其他雙系統和單系統組合PPP的精度,5 h的定位精度能達到0.1 m左右。
3 結束語
本文利用MGEX 7個測站一周的數據分別進行單系統和多系統的動態模擬PPP解算,將得到的結果坐標與測站坐標參考值相減,得到坐標偏差序列。結果表明:動態實驗結果顯示GPS單系統PPP精度的平面定位精度為3~5 cm,高程方向的精度優于1 dm,GLONASS次之,BDS精度最差,在水平方向能達到0.2~0.4 m,垂直方向RMS在0.5 m以上,收斂到0.1 m所需要的時間分別為:GPS 30 min左右、GLONASS 50 min左右、BDS 240 min以上。組合PPP精度有很大提高,GPS+BDS組合PPP精度略高于GPS單系統PPP精度,但會顯著提高其收斂時間,GPS+GLONASS結果略好于GPS+BDS組合。GPS+GLONASS+GALILEO+BDS四系統組合PPP精度最高,靜態結果E、N、U三個方向平均偏差約為0.5 cm、0.4 cm和0.9 cm,收斂時間為不超過10 min;動態四系統三個方向平均偏差約為0.7 cm、0.6 cm和1.7 cm,收斂時間為15 min左右。并且多系統PPP在截止高度角增大時,依然有充足的衛星數量,當截止高度角達到30°時,依然能達到cm級定位精度。對機載動態數據進行PPP解算結果顯示,四系統組合解算的結果與GrafMov的結果符合得最好,優于其他雙系統和單系統組合PPP的精度。
[1] 楊元喜,李金龍,徐君毅,等. 中國北斗衛星導航系統對全球 PNT 用戶的貢獻[J]. 科學通報, 2011, 56(21): 1734-1740.
[2] 韓濤. 衛星導航系統互操作算法研究[D]. 北京,中國科學院大學, 2016.
[3] 李盼. GNSS精密單點定位模糊度快速固定技術和方法研究[D]. 武漢:武漢大學, 2016.
[4] ZUMBERGE J F, HEFLIN M B,etal. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research: Solid Earth, 1997, 102(B3): 5005-5017.
[5] KOUBA J, HEROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS Solutions, 2001, 5(2): 12-28.
[6] MONTENBRUCK O, STEIGENBERGER P,etal. IGS-MGEX: preparing the ground for multi-constellation GNSS science[J]. Inside GNSS, 2014, 9(1): 42-49.
[7] LI P, ZHANG X. Modeling and performance analysis of GPS/GLONASS/BDS Precise Point Positioning[C]//China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume III. Springer Berlin Heidelberg, 2014:251-263.
[8] LI X X, ZHANG X H, REN X D.etal. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BDS[J]. Scientific Reports, 2015, 5,8328 Doi:10.1038/srep08328.
[9] LI X X, ZUS F, LU C X.etal. Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations[J]. Geophysical Research Letters, 2015, 42(10): 4173-4181.
[10] 付青. 多衛星導航系統精密單點定位精度分析[J]. 全球定位系統, 2014, 39(6):42-46.
[11] 張守建, 王偉. 多系統融合精密單點定位性能分析[J]. 大地測量與地球動力學, 2017, 37(10):1065-1069.
[12] 郭敏. 精密星歷類型對實時長距離差分動態定位的影響分析[J]. 全球定位系統, 2017, 42(5):49-52.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19