基于uC/OS-Ⅲ系統全向型農業測控平臺的設計與試驗
2018-05-28 09:17:51張帥宋月鵬徐保巖王征柳洪潔高東升樊桂菊
山東農業大學學報(自然科學版) 2018年3期
張帥,宋月鵬*,徐保巖,王征,柳洪潔,高東升,樊桂菊
?
基于uC/OS-Ⅲ系統全向型農業測控平臺的設計與試驗
張帥1,宋月鵬1*,徐保巖1,王征1,柳洪潔2,高東升3,樊桂菊1
1. 山東農業大學機械與電子工程學院,山東省園藝機械與裝備重點實驗室, 山東 泰安 271018 2. 山東農業大學動物科技學院, 山東 泰安 271018 3. 山東農業大學園藝科學與工程學院, 山東 泰安 271018
針對目前農業移動平臺的移動靈活性及工作穩定性差等問題,利用機器人運動學對Mecanum輪全向運動能力進行理論分析,研制了一種基于uC/OS-Ⅲ系統的全向型農業測控平臺,用于搭載農業機器人在復雜的作業環境中實現全向移動和田間信息采集,減輕勞動強度,提高勞動效率。該平臺分為五部分:機械主體部分、環境檢測系統、控制系統、操作系統及動力系統;通過機器人運動學的分析與計算、Mecanum輪輪組系統與平臺運動坐標系的映射關系分析,獲得實現全方位運動的必要條件與最佳的輪組結構布局,進而實現了穩定迅速的全向移動能力;通過uC/OS-Ⅲ操作系統對任務進行管理和調度,實現運動平臺對作業環境的溫濕度、光照強度、定位信息的檢測與反饋。最后進行了平臺的整體實驗與驗證,結果表明該平臺實現了全向運動并具有較高的工作穩定性。
全向性農業測控平臺; Mecanum輪; uC/OS-Ⅲ系統; 機器人運動學
農業機器人是目前國內外的研究熱點,農業移動平臺作為一種研究農業機器人應用和開發的開放性實驗平臺,在拓展農業機器人功能和推動農業機器人發展中有著舉足輕重的地位。雖然現在有關機器人測控平臺的研究已經進行,但是針對農業機器人方面的測控平臺的研究甚少[1,2]。我國的果園和溫室大棚面積在世界范圍內均位居前列,但因其作業環境復雜機械化程度普遍較低,多采用傳統的人力勞動,導致成本高、工作效率低。自二十世紀中葉開始,發達國家在農業勞動力短缺和人口高齡化的背景下率先開展農業機器人的研究工作,并逐步在作物的移栽、培育、采摘等方面取得了一定的研究成果[3,4]。但這些農業機器人普遍存在移動靈活性差、不能在狹小空間靈活工作等缺點,普遍需要農業移動測控平臺來幫助農業機器人完成快速穩定的移動作業。相對于發達國家,我國使用的農業機器人測控平臺都是在現有的其他領域的測控平臺基礎上進行相關的實驗和應用開發[2,5]。因此,研制一種穩定可靠的全向型農業移動平臺對于我國現代化農業生產作業具有重要意義。
因此,本文設計了一臺適用于果園、溫室大棚等具有復雜作業環境的全向農業測控平臺,該平臺對于解決農業機器人在狹小空間的快速移動和實現田間點對點的信息采集等問題具有重要意義。
1 平臺的機械結構設計與控制系統關鍵硬件的選型
1.1 平臺的機械結構設計
本文在比較了不同移動機構類型的優缺點后,采用了基于Mecanum輪的輪式移動平臺,該平臺突出的特點是結構簡單,只需用輪組的不同速度組合就可實現全方位運動,并且在運動過程中輪系和懸架的相對位置不發生改變[6-10]。該平臺機械本體的整體示意圖如圖1(a)所示,該機械本體由三大部分組成:Mecanum輪組、直流電機組、車架底盤。

圖 1 機械部件示意圖
(a)Sketch map of main structure, (b) 3D model of wheel stick, (c) 3D model of Mecanum wheel
1. Mecanum輪組; 2.直流電機控制器; 3.直流減速電機; 4.底盤支架; 5.輪棍; 6.輪轂
1.Mecanum group. 2. DC motor controller. 3. DC deceleration motor. 4. chassis support. 5. wheel stick. 6. wheel hub
該輪式移動平臺的輪組由四個Mecanum輪組成,每一個Mecanum輪由15個輪棍和1個輪轂組成,并且輪棍和輪轂成一定的角度安裝。每一個麥克納姆輪有三個自由度,一個是繞自身輪轂軸的旋轉運動,一個是繞自身輪棍軸的旋轉運動,最后一個是繞輪棍與地面的接觸點旋轉運動[11]。本文基于文獻[12]的輪棍的母線方程,在SolidWorks中建立輪棍的三維模型如圖1中(b)所示,在輪轂周圍陣列15個輪棍,形成Mecanum輪的三維模型如圖1中(c)所示。
1.2 控制系統關鍵部件的選型
MCU是控制系統硬件的核心,MCU選擇的恰當與否直接決定著測控平臺性能的好壞。根據本文測控平臺的功能性需求,本平臺需要實現對溫濕度、光照強度、位置信息等環境信息進行檢測,因此,根據以上需求,選擇了STM32F103ZET6芯片作為本測控平臺的MCU。另外其運行速度快,功耗相對較低,可實現對信息快速穩定的傳輸與處理。
外設傳感器方面選擇HMT338溫濕度傳感器作為平臺的溫濕度采集裝置;選擇Telesky公司生產的5506型光敏電阻作為光敏傳感器;選擇ALIENTEK公司生產的一款高性能的GPS/北斗定位模塊,型號為ATK-S1216F8-BD。
在信息傳輸方面,本文采用了ALIENTEK推出的一款工業級的高性能GSM/GPRS模塊ATK-SIM800C-V15。該模塊板載SIMCOM公司的工業級四頻GSM/GPRS模塊:SIM800C,可自動搜索并工作在GSM850M、EGSM900M、DCS1800M、PCS1900M四個頻段,可以低功耗地實現語音、SMS(短信)、MMS(彩信)、藍牙數據信息的傳輸功能[13-16]。
2 全方位運動方案的設計
Mecanum輪的形狀如圖1(c)所示,每一個Mecanum輪在電機的驅動下,具有繞自身輪轂旋轉驅動的同時,在與輪棍軸線垂直的方向上也具有自由旋轉的運動特性[17-20]。為了便于Mecanum輪的全方位運動能力的理論分析,本文做了理想條件的假設(假定各個結構均為剛體,忽略變形與振動的影響),并在以上理想假設的基礎上,根據文獻[12]的研究內容和機器人運動學的位姿變化關系對Mecanum組移動平臺的四個輪轂運動進行理論的詳細分析[21-23],同時根據文獻[9]和文獻[21]對Mecanum組移動平臺的全向運動能力進行計算分析。
最終基于以上的分析,在本文中,初步設計了十種平臺的運動方案:前進、后退、左側橫向運動、右側橫向運動、左側斜向上運動、右側斜向上運動、左側斜向下運動、右側斜向下運動、繞自身軸順時針旋轉運動、繞自身軸逆時針旋轉運動。設計方案如表1所示:
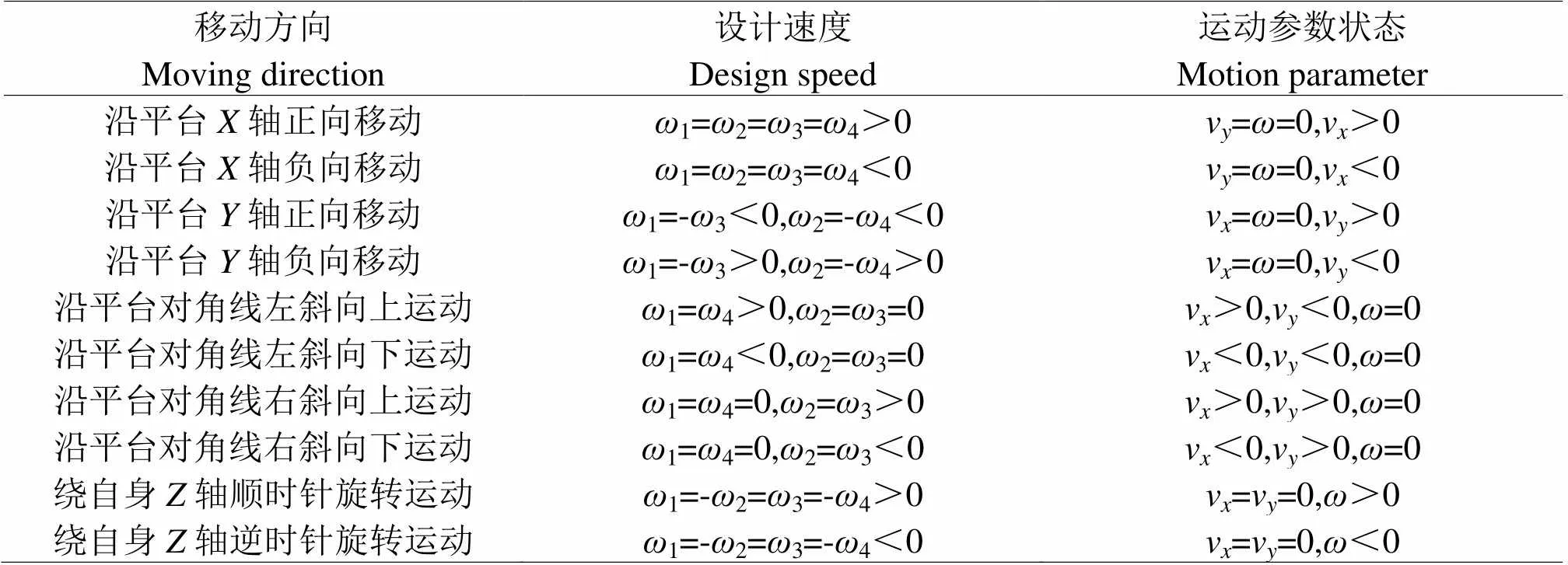
表1 平臺的全向運動設計方案
備注:1,2,3,4表示四個輪子的角速度,v表示平臺沿軸方向的速度,v表示平臺沿軸方向的速度,表示平臺繞自身旋轉軸旋轉時的角速度。
Note:1,2,3,4represent the angular velocity of the four wheels.vrepresents the speed of the platform along theaxis,vrepresents the speed of the platform along theaxis, andrepresents the angular velocity of the platform rotating around its own rotation axis.
3 基于uC/OS-III嵌入式操作系統的程序設計
3.1 uC/OS-III嵌入式系統的任務設置
uC/OS-III是一個全新的實時內核,可以廣泛應用在工業控制,汽車電子,儀器儀表,辦公自動化設備,消費電子等領域的程序設計開發[24]。在本文中,在綜合考慮常見的嵌入式操作系統的優缺點的基礎上,我們使用uC/OS-III操作系統實現對測溫濕度任務、測光照強度任務、獲取定位信息任務、LCD顯示任務、GPRS無線傳輸任務進行管理及調度,實現信息采集并減少CPU的占用時間。
因為系統只有一個CPU,所以當有多個任務需要運行時,操作系統必須在這些待運行任務中選擇一個來運行。根據嵌入式系統的特點,uC/OS-III系統采用了按任務優先級搶占式規則,即系統中的每個任務都按照其任務的重要性分配一個唯一的優先級別,優先級別高的任務先運行,優先級別低的任務后運行。在本文設計的任務中,任務的優先級數字越小,該程序的優先級別越高。
本文通過修改和添加Micrium官網移植工程中的uC-CPU、uC-LIB、uC/OS-III三個文件夾,將uC/OS-III系統移植到STM32F103ZET6上。在該uC/OS-III系統中創建了10個任務,各任務及優先級如表2所示。

表2 任務及任務優先級
3.2 程序流程設計
任務的流程是下位機軟件設計的核心,是進行程序設計的重要依據。如圖2所示,下位機供電后進入系統初始化狀態,在系統初始化中先是將各個外設的寄存器進行初始化,把各個外設調整為就緒狀態。本文設計了6個外設:GPRS傳輸外設、LCD顯示外設、DHT11溫濕度外設、光照傳感器外設、SD卡外設、GPS北斗定位外設。

圖2 全向農業測控平臺程序流程
在外設初始化結束后,進入uC/OS-III系統的初始化階段。該階段對任務控制塊、任務堆棧、任務就緒表、任務調度器、系統內部任務、系統終端管理、系統時間管理、軟件定時器、信號量、互斥量、消息隊列進行初始化。uC/OS-III系統初始化后,嵌入式系統啟動,系統啟動后,創建了Start Task任務。Start Task任務沒有實質性的外設功能,只是創建各個外設的任務并將任務登記到任務列表中,最后Start Task任務將自身刪除。該階段創建了5個任務:消息隊列任務、LCD Show任務、SD存儲任務、GPS北斗定位任務、GPRS無線傳輸任務。
3.3 直流電機閉環調速控制
為使農業測控平臺實現全方位運動,本文采用離散式閉環PI控制的方式對直流電機進行控制。如圖3所示,該閉環控制的思想是:通過霍爾傳感器測得實際的電機轉速,實際轉速與設定轉速相對比,若實際轉速偏小,則增大PWM占空比,若實際轉速偏大,則減小PWM的占空比,最終使實際轉速達到設定值。同時對PI參數進行調定,以實現最終的調速控制,實現平臺的全方位運動。

圖3 離散式閉環PI控制流程
4 樣機的制作及測試
4.1 樣機的制作
本文通過計算分析研制了第一代基于uC/OS-III系統的全向農業測控平臺的樣機。圖4是樣機及搭載的控制系統硬件,車體的具體參數如表3所示。

圖4 控制系統硬件平臺
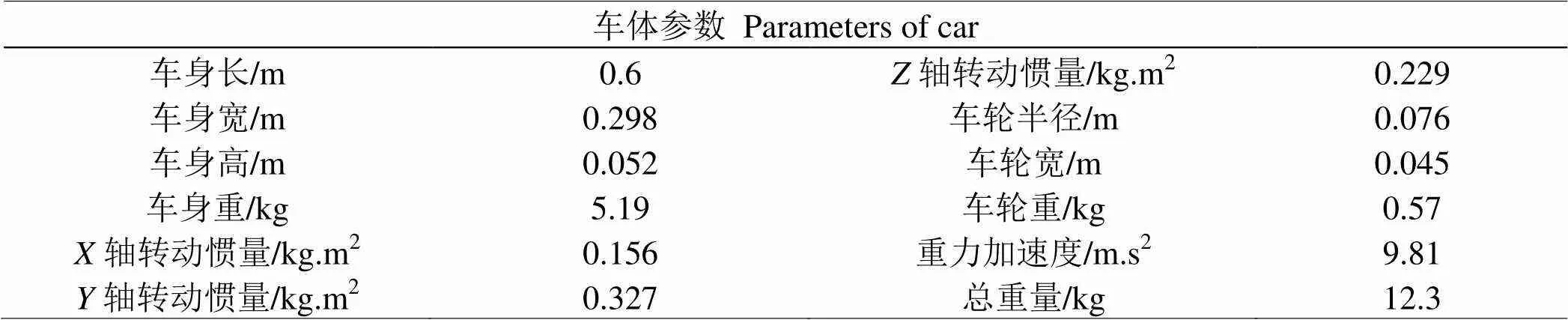
表3 測控平臺的參數
4.2 試驗驗證
為了驗證移動平臺的全向移動能力與工作穩定性,本文通過計算機仿真與現場試驗進行比較論證。基于MATLAB在SimMechanics環境中進行仿真,設定平臺做速度為1.5 m/s的平移運動和旋轉運動。同時利用計算機視覺和模式識別對平臺的質心位置進行運動跟蹤并記錄數據制成圖表如表4所示。

表4 平臺平移運動質心位置表
對表中仿真結果與實際測試結果數據分析可知:平臺理想條件下做平移運動沒有運動誤差,而實際測量結果顯示平移運動有最大2 cm的運動誤差。相對于平臺600 mm×298 mm的總體尺寸而言,誤差較小。
對圖5(a)分析可知:平臺做旋轉運動時,其仿真結果與理論結果相差不大,約有1 mm的運動誤差,實際試驗的結果有最大4 mm的運動誤差,較理論與仿真結果相差很小,該誤差相對與長600 mm、寬298 mm的移動平臺來說,誤差在1%以內,符合設計要求。
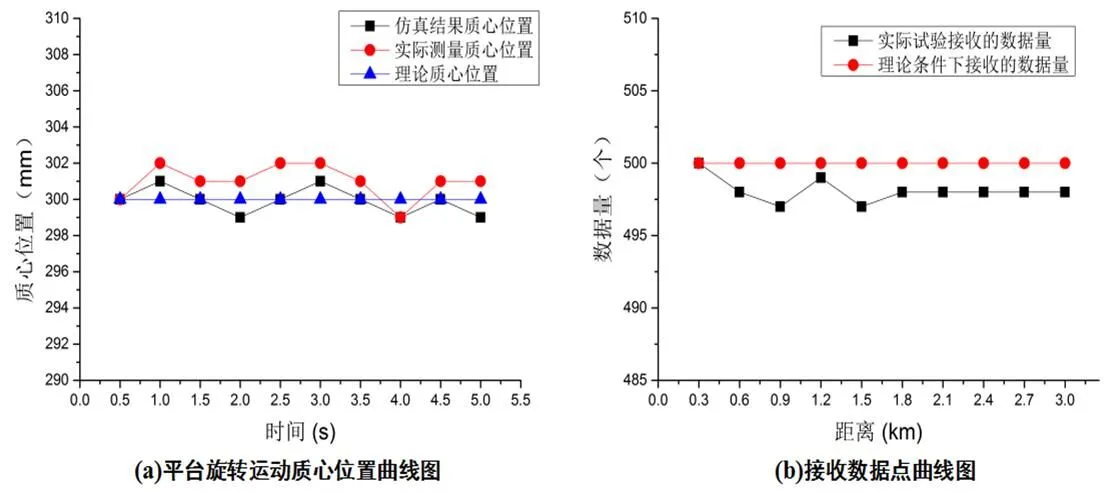
圖5 旋轉運動質心與接收數據點曲線圖
同時對整套系統在山東農業大學北校區進行丟包率試驗,試驗規模:3 km×3 km,區域內16 m高樓、10 m樹木若干。上位機向下位機發送500個數據,得到下位機實際接收到的數據曲線圖,如圖5(b)所示,由圖中的數據可得,整機數據丟失量較少,在3 km范圍內整套系統的丟包率在4‰左右,滿足工業級設計需求。
5 結語
1)本文在分析和對比現有的全向運動平臺運動方案優缺點的基礎上,選擇基于Mecanum輪的輪式移動平臺作為本文的設計方案。根據機器人運動學,推導出Mecanum輪做全方位運動的必要條件。在理論分析的基礎上,對常見的4種Mecanum輪布局方案進行了最優化選擇并設計了十種運動方案;
2)在分析了現有的嵌入式操作系統優缺點的基礎上,結合STM32F103系列單片機的特點,選擇uC/OS-III系統作為本系統下位機的實時操作系統。通過修改官網移植文件,將uC/OS-III系統移植到STM32F103ZET6上。最后在uC/OS-III系統中完成對各種外設的接口程序設計,實現了對周圍環境信息的快速檢測;
3)經過現場實際試驗,該平臺滿足全向運動能力,且工作穩定可靠,滿足設計要求。
[1] 張鐵中,楊麗,陳兵旗,等.農業機器人技術研究進展[J].中國科學:信息科學,2010,40:71-87
[2] 閆樹兵,姬長英.農業機器人移動平臺的研究現狀與發展趨勢[J].拖拉機與農用運輸車,2007,34(5):13-15
[3] 趙勻,武傳宇,胡旭東,等.農業機器人的研究進展及存在的問題[J].農業工程學報,2003,19(1):20-24
[4] 姬江濤,鄭治華,杜蒙蒙,等.農業機器人的發展現狀與趨勢[J].農機化研究,2014(2):1-9
[5] 顧寶興,姬長英,王海青,等.農業開放式智能移動平臺的研制[J].農業機械學報,2012,43(4):173-178
[6] Dicherson SL, Lapin BD. Control of an omni-directional robotic vehicle with Mecanum wheels[C].Atlanta:proceedings of the Telesystems Conference,1991:323-328
[7] Fick D, Dreslinkski RG, Giridhar B,. Centip3De: A 3930DMIPS/W configurable near-threshold 3D stacked system with 64 ARM Cortex-M3 cores[C]//Solid-State Circuits Conference Digest of Technical Papers(ISSCC). International IEEE 2012:190-192
[8] Kim K, Medioni GG. Distributed visual processing for a home visual sensor network[C]. IEEE:Applications of Computer Vision, 2008:1-6
[9] 王一治,常德功. Mecanum四輪全方位系統的運動性能分析及結構形式優選[J].機械工程學報,2009,45(5):307-310,316
[10] Xu P. Mechatronics Design of a mecanum wheeled mobile robot[J]. Cutting edge robotics, 2005,9:61-74
[11] 劉洲,吳洪濤.Mecanum四輪全方位移動機構運動分析與仿真[J].中國制造業信化,2011,40(3):43-46
[12] 周美鋒.基于Mecanum輪的全方位移動機器人研究[D].南京:南京航空航天大學,2014
[13] 徐保巖,宋月鵬,陳苗苗,等.基于ZiBee和GPRS/GSM DUT的果園信息遠程化決策系統設計[J].農業裝備與車輛工程,2015,53(12):20-24
[14] 崔桐瑞,張姬,耿浩,田間作業機組激光導引系統設計與試驗[J].山東農業大學學報:自然科學版,2017,48(3):444-448
[15] 崔杰,徐從體.基于高性能嵌入式平臺的人體運動目標跟蹤技術研究[J].山東農業大學學報:自然科學版2016,47(4):611-615
[16] 王征,宋月鵬,柳洪潔,等.臺式小板件倒角機的研制與試驗[J].山東農業大學學報:自然科學版,2016,47(6):885-888
[17] 呂偉文.全方位輪移動平臺的結構設計[J].機械與電子,2006(12):63-65
[18] Gfrerrer A. Geometry and kinematics of the Mecanum wheel[J]. Computer aided geometric design, 2008,25(9):784-791
[19] Le-Tien T, Phung-The V. Rounting and Tracking System for Mobile Vehicles in Large Area[C]//Electronic Design, Test and Application. Fifth IEEE Internet Symposium on IEEE, 2010: 297-300.
[20] Liu Y, Zhu JJ. Regular perturbation analysis for trajectory linearization control[C]. IEEE: American Control Conference, 2007:3053-3058
[21] 蔡自興,謝斌.機器人學[M].北京:清華大學出版社,2015
[22] 石維亮,王興松,賈茜.基于Mecanum的全方位移動機器人的研制[J].機械工程師,2007(9):18-21
[23] 熊有倫.機器人技術基礎[M].武漢:華中科技大學出版社,1996
[24] 史鳳東.uC/OS在嵌入式傳感器模塊中的應用[D].北京:北京大學,2013
Design and Experiment of Omnidirectional Agricultural Measurement and Control Platform Based on uC / OS-Ⅲ System
ZHANG Shuai1, SONG Yue-peng1*, XU Bao-yan1, WANG Zheng1, LIU Hong-jie2, GAO Dong-sheng3, FAN Gui-jü1
1.271018,2.271018,3.271018,
In order to solve the problems of poor mobility and poor working stability of the current agricultural mobile platform, a kind of omnidirectional integrated monitoring and control platform based on uC / OS-Ⅲ system was developed by using the theoretical analysis of robot kinematics and the omnidirectional motion ability of Mecanum wheel. It is used to carry agricultural robot in complex operation environment to realize omnidirectional movement and field information collection, reduce labor intensity and improve labor efficiency. The platform is divided into five parts: mechanical parts, environmental detection system, control system, operating system and power system. Through the analysis and calculation of robot kinematics and the analysis of mapping relation between Mecanum wheel group system and platform motion coordinate system, the necessary conditions and the optimal wheel group structure layout for realizing omnidirectional motion are obtained. Furthermore, stable and rapid omnidirectional mobility is realized.
Omnidirectional agricultural measurement and control platform; Mecanum wheel; uC/OS- III system; robot kinematics
S229+.1
A
1000-2324(2018)03-0438-06
2017–09–10
2017–10–19
山東省現代農業產業技術體系果品產業創新團隊資金(SDAIT-06-12,SDAIT-06-1);國家十三五智能農機裝備重點研發計劃項目(2016YFD0701701);山東省農機裝備研發創新計劃項目(2017YF003);山東農業大學“雙一流”科技創新團隊專項(SYL2017XTTD07)
張帥(1993-),男,在讀碩士,從事智能控制和信號處理研究. E-mail:zhxmzhangshuai@163.com
Author for correspondence. E-mail:uptonsong@163.com
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
今日農業(2020年15期)2020-12-15 10:16:11
裝備制造技術(2019年12期)2019-12-25 03:06:46
