機械臂的力、位置控制淺談
2018-05-14 13:52:20鄧志強
現(xiàn)代職業(yè)教育·中職中專 2018年9期
鄧志強
[摘 ? ? ? ? ? 要] ?機械臂模擬人臂,其在執(zhí)行任務(wù)過程中會與外界環(huán)境相互接觸。為了讓機械臂作業(yè)達到良好的效果,需對機械臂同時進行力和位置的控制。對機械臂力/位置混合控制算法的研究做簡單綜述。
[關(guān) ? ?鍵 ? 詞] ?機械臂;力/位置混合控制;柔順控制;工作原理
[中圖分類號] ?G712 ? ? ? ? ? ? ? ?[文獻標志碼] ?A ? ? ? ? ? ?[文章編號] ?2096-0603(2018)26-0061-01
一、機械臂與柔順控制
目前工業(yè)中使用的機械臂,如上料、下料、噴漆等,都只是簡單的軌跡控制,這類控制主要是以機器人運動學為基礎(chǔ),以機械臂末端或每個自由度的位置、速度和加速度為期望,對機械臂的期望軌跡進行跟蹤控制,因此常稱為位置控制。而機械臂在運動過程中與物體相接觸,則為受限運動的控制,這類控制不但要求機械臂沿一定的軌跡運動,還要對它與環(huán)境間的接觸力進行控制,因此常稱為力控。力控制是要實現(xiàn)機械臂末端在受到一些位置約束的自由度上實現(xiàn)與環(huán)境間接觸力的控制,并且對力的控制精度要求非常高。因此,在機械臂的很多作業(yè)情況下,對機械臂作用力的控制尤為重要。要解決這個矛盾,主要靠實現(xiàn)機械臂的柔順控制,而力/位置混合控制可以實現(xiàn)對機械臂力和位置的同時控制,這也是實現(xiàn)機械臂柔順控制的重要方法。下面簡述一下機械臂的柔順控制。
二、柔順控制分類及特點
所謂柔順(Compliance),即是指機械臂對外界環(huán)境變化的適應(yīng)能力。若環(huán)境因受到機械臂的作用力而產(chǎn)生形變,機械臂仍能保持期望的接觸力與環(huán)境相互接觸,這即為機械臂的柔順能力。要對機械臂施加柔順控制,柔順控制本質(zhì)上是力和位置的混合控制,其實現(xiàn)方法有兩種:被動柔順控制與主動柔順控制。
(一)被動柔順控制
被動式柔順控制是由一定的機械裝置在與外界環(huán)境接觸時,通過特殊的結(jié)構(gòu)對相互間的作用力產(chǎn)生的自然順從。主要是通過自身控制器調(diào)節(jié)位置控制系統(tǒng)的增益,從而改變機械臂的總體剛度以適應(yīng)外部環(huán)境的剛度。
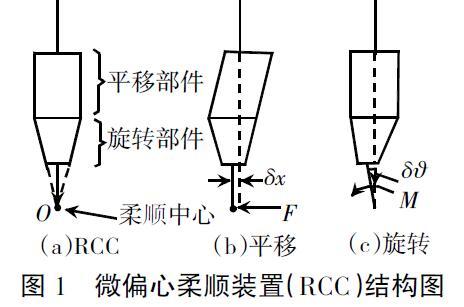
這種裝置可以使機械臂與環(huán)境作用時吸收或儲存能量,這種裝置是微偏心柔順裝置(簡稱為RRC),該裝置實際上是一個具有6自由度的彈簧,插裝在機械臂的腕部和末端執(zhí)行器之間,通過調(diào)節(jié)6個彈簧的彈性,可以獲得不同大小的柔順性,具有一定的自然順從能力。
由于RCC裝置的柔順中心一旦確定,就很難調(diào)整,使得機械臂的通用性較差,也嚴重制約了RCC的推廣與應(yīng)用。由于本身的缺陷,在RCC裝置的實際應(yīng)用中,并不能完全從根本上解決機械臂應(yīng)用中的主要問題與矛盾。為了解決這一問題,人們也在尋找另一種可以替代被動柔順控制的方法。
(二)主動柔順控制
根據(jù)機械臂末端執(zhí)行器的期望剛度,計算出關(guān)節(jié)伺服系統(tǒng)的剛度,用控制器來調(diào)整關(guān)節(jié)伺服系統(tǒng)的位置誤差增益,使關(guān)節(jié)剛度與機械臂末端執(zhí)行器的期望剛度相適應(yīng),這種方法稱為主動柔順控制方法。
三、主動柔順控制工作原理
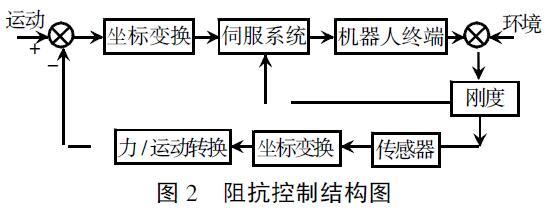
實現(xiàn)機械臂主動柔順控制的方法是阻抗控制。阻抗控制,顧名思義,是控制力和位置之間的動力學關(guān)系,而不是直接控制力和位置,這種動態(tài)關(guān)系類似于電路中的阻抗,這也是阻抗控制名稱的由來。
如圖2所示,其中力/運動轉(zhuǎn)換為控制器的設(shè)計重點,力/運動轉(zhuǎn)換表達式為:?駐x=KF ?(1)
其中K為力/運動轉(zhuǎn)換矩陣,通過該矩陣,可將阻抗控制分為兩種基本形式:一種是力和位置的關(guān)系,可用剛性矩陣來描述,即為剛度控制;另一種是力和速度的關(guān)系,可用黏滯阻尼矩陣來描述,即為阻尼控制。K中的元素越大,系統(tǒng)體現(xiàn)得越柔;K中元素越小,系統(tǒng)體現(xiàn)得越剛。
當阻尼反饋矩陣Κ=0時,稱為剛度控制。剛度控制只考慮靜態(tài),即主要依靠剛度矩陣Κ來表征機械臂末端接觸力大小與位置誤差之間的關(guān)系,位置誤差為系統(tǒng)的輸入量,具體的表達式為:
F(t)=Kp?駐X ?(2)
其中KP通常為對角陣,改變對角陣中的值,可以對機械臂柔順性中的剛度進行調(diào)節(jié)。
綜合上述,阻尼控制可實現(xiàn)主動柔順控制。因此,阻抗控制更多地應(yīng)用于裝配工作中。
近年來,較多采用模型自適應(yīng)控制、跟蹤控制、滑模控制來提高機械臂力和位置控制對系統(tǒng)的外界干擾、被控模型誤差、力檢測噪聲影響。另外,機械臂柔順性是其智能化的一個重要方面,是其能夠順利完成各種高要求作業(yè)的重要保證,因此機械臂的柔順控制是將來機器人控制研究的重點與難點。
參考文獻:
[1]孫建華.基于網(wǎng)絡(luò)面向柔順運動的機器人遙操作系統(tǒng)研究[D].電子科技大學,2004.
[2]殷躍紅,朱劍英,尉忠信.機器人力控制研究綜述[J].南京航空航天大學學報,1997(2).
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
當代工人(2020年8期)2020-05-25 09:07:38
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
Coco薇(2016年2期)2016-03-22 02:42:52
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
Coco薇(2015年1期)2015-08-13 02:47:34
