基于多普勒量測的UKF多目標(biāo)跟蹤方法
2018-05-09 06:28:15,,,
探測與控制學(xué)報 2018年2期
關(guān)鍵詞:方法
,, ,
(空軍工程大學(xué)信息與導(dǎo)航學(xué)院,陜西 西安 710077)
0 引言
彈道導(dǎo)彈在飛行中段為了突破防守,經(jīng)常會釋放伴飛誘餌,形成密集目標(biāo)群,導(dǎo)致防御系統(tǒng)估計精度低,甚至系統(tǒng)產(chǎn)生崩潰。如何解決此類群目標(biāo)跟蹤問題一直是多目標(biāo)跟蹤領(lǐng)域研究的熱點[1]。
基于隨機(jī)有限集(Random Finite Set,RFS)的多目標(biāo)跟蹤方法,避免了傳統(tǒng)多目標(biāo)跟蹤的數(shù)據(jù)關(guān)聯(lián),是近年來解決群目標(biāo)跟蹤方法的常用方法。Mahler早在20世紀(jì)90年代就提出了將隨機(jī)有限集運(yùn)用于多目標(biāo)跟蹤的方法[2-3],并于2003年通過貝葉斯濾波器的一階距近似方法,推導(dǎo)出了一種計算可行的概率假設(shè)密度濾波(Probability Hypothesis Density, PHD)濾波器[4];接著,B.N.Vo等人對PHD濾波器進(jìn)行了工程實現(xiàn)研究,分別通過粒子濾波[5]和高斯混合[6]的形式,使得基于RFS的多目標(biāo)跟蹤方法得以進(jìn)一步應(yīng)用。其中,高斯混合概率假設(shè)密度濾波器(Gaussian Mixture Probability Hypothesis Density,GMPHD)具有計算復(fù)雜度低,容易工程實現(xiàn)等優(yōu)點,但同時存在方法對模型依賴嚴(yán)重,需要先驗信息,而且采用近似方法易導(dǎo)致估計性能較差等問題。本文針對上述問題,提出了基于多普勒量測的UKF多目標(biāo)跟蹤方法。
1 GMPHD算法
1.1 系統(tǒng)模型
假設(shè)目標(biāo)的狀態(tài)模型服從式(1):
xk+1=Fxk+vk
(1)

(2)
假定二維直角坐標(biāo)系下傳感器位置在原點s0=0,0T,觀測目標(biāo)與其的斜矩為rk,方位角為θk,多普勒速度為dk。目標(biāo)的觀測模型為:
zk=hk(xk)+wk
(3)
其中,
(4)

1.2 GMPHD算法流程
高斯混合PHD濾波的基本思想是:在線性高斯系統(tǒng)模型下,將上一時刻的存活目標(biāo)、新生目標(biāo)、衍生目標(biāo)及目標(biāo)的狀態(tài)噪聲、量測噪聲分布分別表示成多個高斯分量的加權(quán)和形式,以此來近似目標(biāo)的PHD;并利用卡爾曼等濾波對高斯分量的均值、方差及其權(quán)值迭代更新;在高斯混合分量遞推的過程中可以直接提取目標(biāo)的狀態(tài)及數(shù)目,從而實現(xiàn)對多目標(biāo)的實時跟蹤。
GMPHD算法的流程包括了PHD預(yù)測、PHD更新、剪枝與合并、數(shù)目與狀態(tài)估計四個步驟。
1.2.1PHD預(yù)測
假設(shè)k-1時刻的PHD為高斯混合分布,目標(biāo)的運(yùn)動模型為線性或近似線性的,狀態(tài)噪聲和觀測噪聲均為高斯分布,則k時刻多目標(biāo)隨機(jī)集的PHD也服從高斯混合分布。已知在k-1時刻,目標(biāo)狀態(tài)的后驗PHD為一個高斯混合形式:
(5)
由于衍生部分占總PHD的比例很小,故在此對于衍生部分忽略不計。那么在k時刻,預(yù)測目標(biāo)狀態(tài)集PHD的高斯混合表示為:
Dk|k-1(x)=Ds,k|k-1(x)+Dγ,k(x)
(6)
其中,Ds,k|k-1(x)、Dγ,k(x)分別表示存活目標(biāo)和新生目標(biāo)的PHD。即:
(7)
則,預(yù)測PHD為:
(8)
1.2.2PHD更新
已知k時刻目標(biāo)的預(yù)測PHD和量測集Zk,且預(yù)測PHD為高斯混合分布,則k時刻目標(biāo)的后驗PHD也是高斯混合分布,可記為:
(9)
1.2.3剪枝與合并

(10)
我們根據(jù)上式,進(jìn)行剪枝與合并,從而降低高斯分量的數(shù)目。
1.2.4數(shù)目與狀態(tài)估計

2 基于多普勒量測的UKF多目標(biāo)跟蹤方法
上一章主要構(gòu)建了GMPHD的算法框架,本章主要給出將多普勒信息融合進(jìn)框架的算法流程。
在現(xiàn)代戰(zhàn)爭中,實際采用的雷達(dá),除了目標(biāo)的斜矩和角度,往往還可以提供更多信息,例如多普勒量測等。理論計算與實踐已經(jīng)證明,充分利用多普勒量測等目標(biāo)信息不僅可以加強(qiáng)算法的魯棒性,而且有效地提高對目標(biāo)的跟蹤精度。
在以往的方法中,為了解決帶多普勒量測的雷達(dá)目標(biāo)跟蹤問題,最常用方法是擴(kuò)展卡爾曼濾波器(Extended Kalman Filter,EKF)[7]。但存在很明顯的問題:此時雷達(dá)所提供的量測和目標(biāo)運(yùn)動狀態(tài)之間的關(guān)系是完全非線性的,不能滿足要求。而且在已有的帶多普勒量測的雷達(dá)目標(biāo)跟蹤方法中,為了簡便方法,文章通常假設(shè)斜矩、角度和多普勒的量測誤差統(tǒng)計獨(dú)立,然而最新研究表明[8],對于某些波形而言,斜矩和多普勒量測誤差是統(tǒng)計相關(guān)的。
多普勒信息的處理有兩個關(guān)鍵步驟:第一,對新生目標(biāo)PHD的初始化:將多普勒速度和斜矩、方位角量測相結(jié)合,計算新生目標(biāo)強(qiáng)度函數(shù)[9];第二,考慮到量測信息在加入了多普勒速度后高度非線性,同時為了去除目標(biāo)的多普勒速度和斜矩的相關(guān)性,使用UKF對高斯分量進(jìn)行迭代更新[10]。
2.1 新生目標(biāo)初始化

由卡爾曼濾波器公式可得,新生目標(biāo)初始化速度均值為:
(11)
協(xié)方差矩陣為:
(12)
那么在k時刻,式(6)中新生目標(biāo)狀態(tài)集強(qiáng)度函數(shù)的高斯混合可表示為:
(13)
2.2 高斯分量更新
運(yùn)用UKF對各高斯混合分量的均值和協(xié)方差進(jìn)行更新,迭代求解。即首先計算采樣點及其權(quán)值,然后根據(jù)狀態(tài)方程得到點的一步預(yù)測,再根據(jù)量測方程計算預(yù)測的量測,最后結(jié)合傳感器所提供的量測進(jìn)行狀態(tài)更新和狀態(tài)協(xié)方差更新。
(14)
(15)
2)運(yùn)用量測進(jìn)行更新分為兩步,首先進(jìn)行一步預(yù)測,計算GMPHD預(yù)測步驟中的均值與協(xié)方差:
(16)
(17)
(18)
進(jìn)行PHD的預(yù)測步驟時,式(8)中的均值和協(xié)方差即為式(17)、式(18)的結(jié)果。
然后再將預(yù)測量測和傳感器提供的量測代入,計算GMPHD更新步驟中的均值與協(xié)方差:
(19)
(20)
(21)
(22)
(23)
(24)
進(jìn)行PHD的更新步驟時,式(9)中的均值和協(xié)方差即為式(23)、式(24)的結(jié)果。
3 仿真實驗
本章為驗證方法有效性,將本文方法與文獻(xiàn)[12]、文獻(xiàn)[13]中濾波方法進(jìn)行比較。性能評價標(biāo)準(zhǔn)采用運(yùn)行時間、目標(biāo)個數(shù)估計和最優(yōu)子模式指派(Optimal Subpattern Assignment, OSPA)距離[14]。OSPA距離計算公式為:
式中,p=1,c=300,π∈Πn。

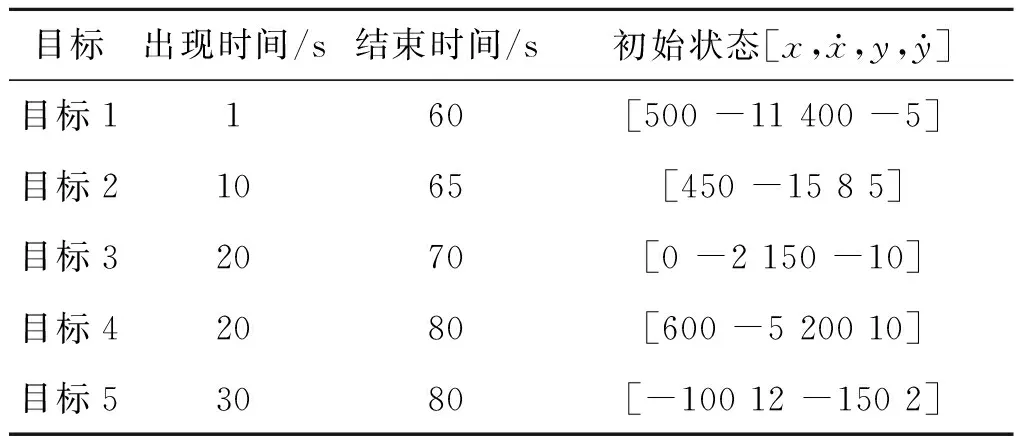
表1 目標(biāo)初始狀態(tài)Tab.1 Initial state and tracking of targets
圖2是本文方法的單次仿真結(jié)果,可以從圖上直觀地看出,在沒有目標(biāo)初始信息的情況下,由于采用了多普勒信息進(jìn)行初始化,各個時刻的估計值并未受到雜波的過多干擾,基本上都與真實位置相重合,說明本文方法能夠?qū)δ繕?biāo)進(jìn)行有效地跟蹤。
為了對本文所提方法有效性進(jìn)一步驗證,將本文方法(UKF-GMPHD)與文獻(xiàn)[12](C-PHD)文獻(xiàn)[13](GMPHD)中方法進(jìn)行對比。 真實航跡如圖1所示,進(jìn)行100次獨(dú)立蒙特卡洛仿真實驗平均后,目標(biāo)的個數(shù)估計如圖3所示,從圖3可以明顯看出,在目標(biāo)出現(xiàn)和消失時,個數(shù)估計會產(chǎn)生一定偏差,但本文方法在個數(shù)估計基本是無偏的,而GMPHD算法在對于目標(biāo)個數(shù)估計上誤差較明顯,C-PHD算法由于在濾波過程中同時了進(jìn)行勢分布的運(yùn)算,所以對于個數(shù)估計性能較優(yōu),但部分階段的偏差也大于本文方法,說明本文方法在個數(shù)估計上誤差較小。
圖4為三種方法對于目標(biāo)估計的OSPA距離,OSPA距離越大,說明方法跟蹤性能越差。從圖中的曲線可以看出,在目標(biāo)個數(shù)發(fā)生變化時,OSPA距離會迅速變大,但是整體看來,本文方法的OSPA距離曲線一直在其他兩種方法曲線的下方,說明本文方法在跟蹤性能上優(yōu)于其他兩種方法。
圖5為三種方法的運(yùn)行時間比較圖,可以清楚地看到,由于其他兩種方法采用的是EKF加串行更新的濾波方法,方法復(fù)雜度大大提升,所用時間較長,尤其是C-PHD算法,如上文所提,為了保證個數(shù)估計的準(zhǔn)確性,加入了勢估計,使得方法的空間復(fù)雜度較大;而本文方法采用UKF濾波方法,不僅減小了目標(biāo)個數(shù)估計的誤差,還進(jìn)一步降低了方法的復(fù)雜度,使得方法效率較高,運(yùn)行時間遠(yuǎn)小于其他兩種方法。
4 結(jié)論
基于多目標(biāo)跟蹤的復(fù)雜背景,本文在GMPHD的框架下,提出了基于多普勒量測的UKF多目標(biāo)跟蹤方法。該方法通過對多普勒量測的運(yùn)用,首先實現(xiàn)了新生目標(biāo)強(qiáng)度函數(shù)的去先驗自動更新,然后采取UKF對高斯分量進(jìn)行更新,降低了非線性量測方程的估計偏差。通過仿真實驗對比,本文所提方法在目標(biāo)個數(shù)和位置估計精度方面以及方法運(yùn)算速度方面,均較現(xiàn)有方法有所提高,達(dá)到了預(yù)期成果。
參考文獻(xiàn):
[1]Tanks R D. NMD: Policy Issues and Technological Capabilities [R]. US: The Institute for Foreign Policy Analysis,2000.
[2]Goodman I, Mahler R, Nguyen H.Mathematics of data fusion[M].Boston: Kluwer Academic Publishers,1997.
[3]Mahler R.Statistical multisource multitarget information fusion[M].Norwood MA, USA: Artech House,2007.
[4]Mahler R.Multitarget Bayes filtering via first-order multitarget moments[J].IEEE Transacions on Aerospace and Electronics Systems,2003,39(3):1152-1178.
[5]Vo B-N, Singh S, Doucet A. Sequential Monte Carlo implementation of the PHD filter for multi-target tracking[C]// Proceedings of the International Conference on Information Fusion, Cairns, Australia:IEEE,2003:792-799.
[6]Vo B-N, Ma W-K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing,2006,54(11):4091-4104.
[7]潘泉等.多源信息融合理論及應(yīng)用[M].北京:清華大學(xué)出版社,2013.
[8]韓偉, 湯子躍, 朱振波. 利用ESM方位信息的多普勒盲區(qū)目標(biāo)跟蹤方法[J]. 系統(tǒng)工程與電子技術(shù), 2013, 35(8):1650-1656.
[9] 蒼巖, 陳迪, 畢曉君. 自適應(yīng)GM—PHD濾波器在多目標(biāo)追蹤的應(yīng)用[J]. 哈爾濱工程大學(xué)學(xué)報, 2015, 36(11):1526-1531.
[10]潘泉, 楊峰, 葉亮,等. 一類非線性濾波器——UKF綜述[J]. 控制與決策, 2005, 20(5):481-489.
[11]Mo LB,Song X Q,Zhou Y Y,et al.Unbiased converted measurements for tracking[J].IEEE Trans. on Aerospace and Electronic Systems,1998,34(3):1023-1027.
[12]Yooh J H, Kim Y, Bae S H, et al. Joint initialization and tracking of multiple moving objects using Doppler information[J]. IEEE Trans. on Signal Processing,2011,59(7):3447-3452.
[13]胡子軍, 張林讓, 張鵬. 利用多普勒信息的單步初始化 GMCPHD 濾波器[J]. 系統(tǒng)工程與電子技術(shù), 2014, 36(11):2122-2126.
[14]劉偉峰,文成林.隨機(jī)集多目標(biāo)跟蹤性能評價指標(biāo)比較與分析[J].光電工程,2010,37(9):14-10.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56