MiroSot足球機(jī)器人電機(jī)驅(qū)動系統(tǒng)設(shè)計
2018-04-23 12:09:22劉銀萍
自動化儀表 2018年3期
劉銀萍
(廣東工業(yè)大學(xué)實驗教學(xué)部,廣東 廣州 510006)
0 引言
在足球機(jī)器人比賽系統(tǒng)中,足球機(jī)器人的運動速度和精度將直接影響球隊的勝負(fù)。機(jī)器人的精確運動控制,主要取決于車輪電機(jī)驅(qū)動系統(tǒng)的性能。比賽中,機(jī)器人小車微處理器大多使用單片機(jī),如:ATMEGA163、C8051和MCS-96等。這些控制芯片有些雖然是面向電機(jī)控制的,但并不具備快速處理能力,實時性不強(qiáng)[1]。
本設(shè)計采用由美國TI公司生產(chǎn)的16位處理器DSP-TMS320LF2407A作為控制器,之所以沒有選用32位DSP或更高檔芯片是因為機(jī)器人的速度分為正負(fù)127檔,16位定點處理器精度己經(jīng)足夠[2]。TMS320LF2407A集數(shù)字信號處理器(digital signal processor,DSP)的高速信號處理運算能力和適于電機(jī)控制的外圍電路于一體。采用TMS320LF2407A芯片構(gòu)造電機(jī)驅(qū)動系統(tǒng),不僅簡化了電路,降低了系統(tǒng)的損耗,而且提高了系統(tǒng)的準(zhǔn)確性和實時性。
1 系統(tǒng)硬件設(shè)計
1.1 整體設(shè)計
本文采用雙電機(jī)分別驅(qū)動左右兩輪。電機(jī)驅(qū)動系統(tǒng)硬件主要包括微控制器TM3S20LF2407A、電機(jī)驅(qū)動脈寬調(diào)制(pulse width modulation,PWM)橋式電路、編碼盤等電路。直流電機(jī)驅(qū)動控制電路方案整體結(jié)構(gòu)設(shè)計如圖 1 所示。電機(jī)驅(qū)動系統(tǒng)的電路設(shè)計主要使用TM3S20LF2407A芯片的3個模塊:PWM 模塊、QEP 模塊和A/D 模塊。電機(jī)采用PWM方式驅(qū)動,TM3S20LF2407A產(chǎn)生4 路載波比為20 kHz的高分辨率PWM波,用來控制兩個電機(jī)的速度方向和大小。驅(qū)動電路采用含有雙H 橋的L298驅(qū)動器來驅(qū)動電機(jī)。兩個QEP捕獲單元實現(xiàn)對兩個電機(jī)的光電碼盤反饋信號的鑒相和計數(shù)。A/D 轉(zhuǎn)換模塊用于電機(jī)的電樞電流檢測。

圖1 電路整體結(jié)構(gòu)圖 Fig.1 Overall structure of the circuit
1.2 電機(jī)驅(qū)動電路設(shè)計
由于TMS320LF2407A輸出的PWM信號,電壓為脈沖形式,輸出的電流很小,不足以直接驅(qū)動電機(jī)運行,需使用驅(qū)動器將其轉(zhuǎn)換成可驅(qū)動電機(jī)的驅(qū)動信號。本設(shè)計使用L298雙H橋驅(qū)動器驅(qū)動。L298是SGS公司的產(chǎn)品,內(nèi)部包含4通道邏輯驅(qū)動電路,是一種二相和四相電機(jī)的專用驅(qū)動芯片[3]。由于L298內(nèi)部集成有兩個H橋的高電壓大電流雙全橋式驅(qū)動器,這樣就可以用一片L298驅(qū)動兩個電機(jī)。由于其接口簡單,直接與TMS320LF2407A事件管理器產(chǎn)生的一對PWM信號相連,就可以控制一個電機(jī)的轉(zhuǎn)速與轉(zhuǎn)向,控制方便,大大簡化了電路。L298的Vss接控制邏輯電源,Vs接驅(qū)動電機(jī)電源口[4]。IN1~I(xiàn)N4輸入引腳為標(biāo)準(zhǔn) TTL邏輯電平信號[5],用來控制 H 橋的開與關(guān)即實現(xiàn)電機(jī)的正反轉(zhuǎn)。ENA、ENB 引腳則為使能控制端,用來輸入 PWM 信號,實現(xiàn)電機(jī)調(diào)速。信號輸出端OUTl、OUT2和 OUT3、OUT4之間分別接兩個電機(jī)[6],用于控制電機(jī)。另外,L298 的 SENA,SENB 引腳通過 0.5 kΩ的電阻接地,為電流反饋引腳,以便實現(xiàn)系統(tǒng)的電流閉環(huán)控制[7]。由于足球機(jī)器人的比賽環(huán)境比較惡劣,常有強(qiáng)烈碰撞發(fā)生,小車電機(jī)經(jīng)常會發(fā)生堵轉(zhuǎn)和快速反轉(zhuǎn)。
本設(shè)計利用IN4007二極管進(jìn)行反接,實現(xiàn)電路保護(hù),防止由于電機(jī)因堵轉(zhuǎn)等原因產(chǎn)生高脈沖沖擊電壓而損壞驅(qū)動器[8]。另外,L298中設(shè)計了過流保護(hù)電路。LM358是一個電壓比較器,IN1(+)/IN2(+)電壓為1 V。當(dāng)IN1(-)/ IN2(-)的電壓低于IN1(+)/IN2(+)電壓時,OUT1/OUT2輸出高電平,驅(qū)動L298的ENA /ENB管腳使芯片正常工作;否則輸出低電平,關(guān)閉L298。電機(jī)驅(qū)動電路如圖2所示。
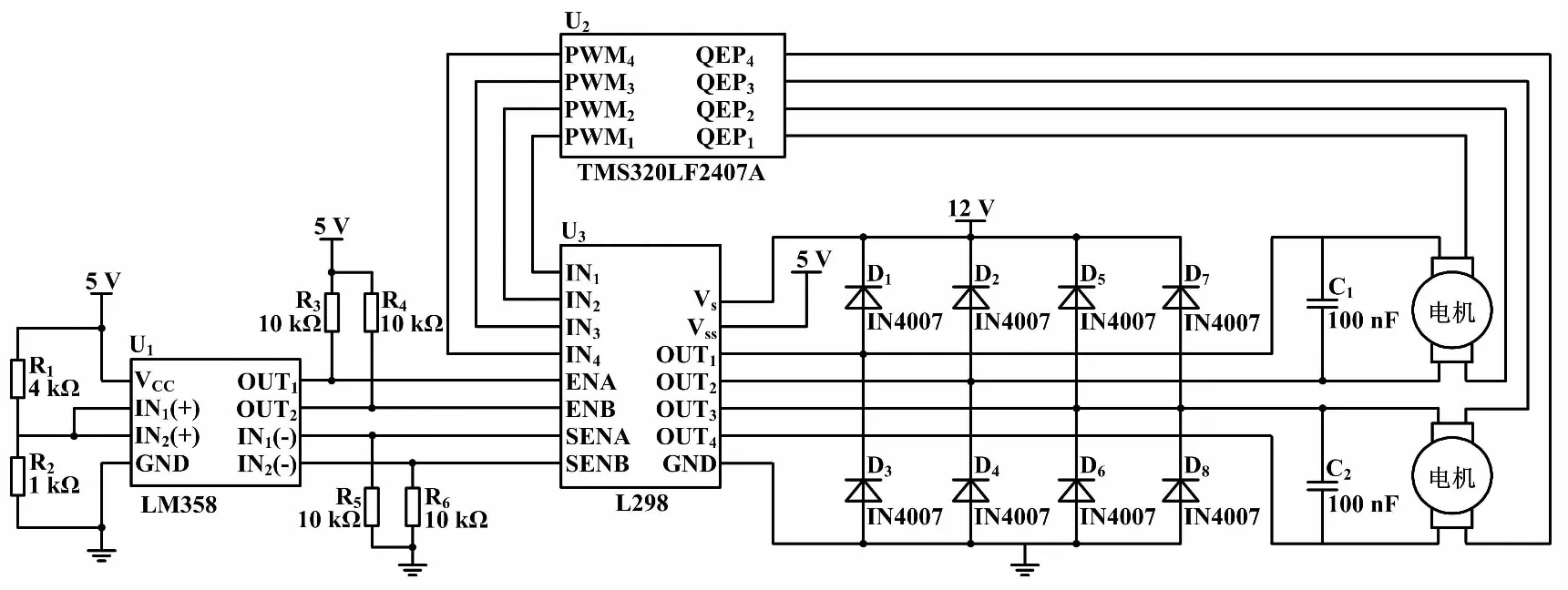
圖2 電機(jī)驅(qū)動電路 Fig.2 Driving circuit of the motor
1.3 電機(jī)速度檢測模塊
考慮到機(jī)器人的尺寸和功耗的限制,必須選用體積小、功耗低的電機(jī)。本設(shè)計采用德國FAULHABER公司生產(chǎn)的2224U0006SR微型直流電機(jī),利用電機(jī)配套的增量式光電碼盤IE2-512來檢測電機(jī)的轉(zhuǎn)速。增量式光電碼盤由光柵盤(碼盤)和光電檢測裝置組成[9]。光柵盤是在一定直徑的原板等分地開通若干個孔,由于光柵盤與電機(jī)同軸,電機(jī)旋轉(zhuǎn)時,光柵盤與電機(jī)同速旋轉(zhuǎn),經(jīng)發(fā)光二極管等電子元件組成的檢測裝置檢測出若干個脈沖信號。通過計算每秒光電編碼器輸出脈沖的個數(shù)就能反映當(dāng)前電機(jī)的轉(zhuǎn)速。利用光電碼盤輸出兩路相位相差90°的兩路脈沖這一特性來鑒別電機(jī)轉(zhuǎn)向。 電機(jī)編碼器光電檢測電路如圖3所示。
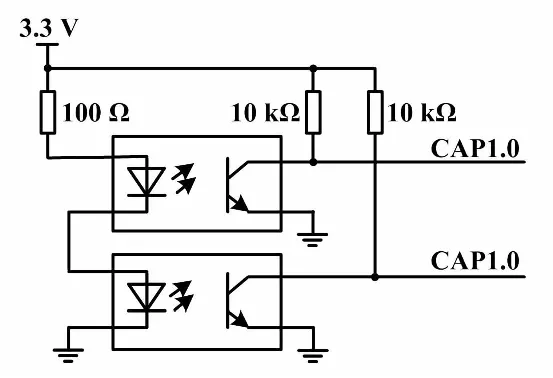
圖3 光電檢測電路 Fig.3 Photoelectric detection circuit
TMS320LF2407A帶有兩個正交編碼脈沖(QEP)電路,用于接收兩個電機(jī)的編碼盤脈沖信號。但是光電編碼器輸出信號為差分信號,需要轉(zhuǎn)換成單端信號才能輸入到TMS320LF2407A的QEP模塊。電機(jī)編碼盤與TMS320LF2407A接口電路如圖4所示。本設(shè)計采用四差分線路接收器 AM26LS32,將編碼盤輸出的差分信號A+、A-,B+、B-轉(zhuǎn)換為A、B兩路單端正交脈沖信號。由于光電編碼器供電電壓是5 V,輸出的信號也是5 V電平,而DSP工作電壓是3.3 V,所以本設(shè)計采用雙電源供電的雙向收發(fā)器74LVC4245,將5 V轉(zhuǎn)換成3.3 V電平。TMS320LF2407A控制器的QEP1、QEP2端口將捕獲脈沖信號A、B的數(shù)據(jù)存放在寄存器中,通過比較捕獲到的A、B兩相脈沖信號,確定電機(jī)的正反轉(zhuǎn)狀態(tài)和轉(zhuǎn)速。
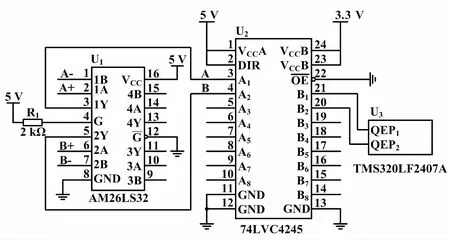
圖4 電機(jī)編碼盤與TMS320LF2407A接口電路 Fig.4 Interface circuit of motor encoder and TMS320LF240TA
2 系統(tǒng)軟件設(shè)計
電機(jī)控制程序流程圖如圖5所示。在系統(tǒng)上電后,首先初始化控制器參數(shù),實時讀取串口通信中斷程序接收到的機(jī)器人給定轉(zhuǎn)速和定時器中斷采樣車輪的實際測量速度。若兩者速度一致,則實際轉(zhuǎn)速不變;否則TMS320LF2407A處理器根據(jù)給定轉(zhuǎn)速與實際測量速度,得到速度偏差值,經(jīng)過PID控制算法模塊計算出新的控制量,輸出PWM信號驅(qū)動電機(jī)。
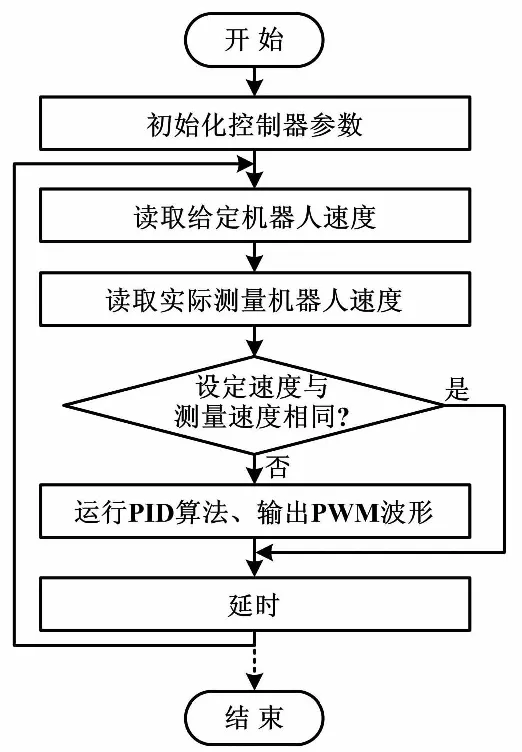
圖5 電機(jī)控制程序流程圖 Fig.5 Program flowchart of motor control
3 試驗及結(jié)果分析
經(jīng)試驗測定,足球機(jī)器人啟動時間、制動時間如表1所示。機(jī)器人速度測試結(jié)果如表2所示。從測試結(jié)果可以看出,機(jī)器人電機(jī)無論正轉(zhuǎn)還是反轉(zhuǎn),左、右輪的輸出線性都很好,兩輪的協(xié)調(diào)性也較好,實際輸出轉(zhuǎn)速達(dá)到了上位機(jī)給定值,控制精度較高,滿足實際需要。
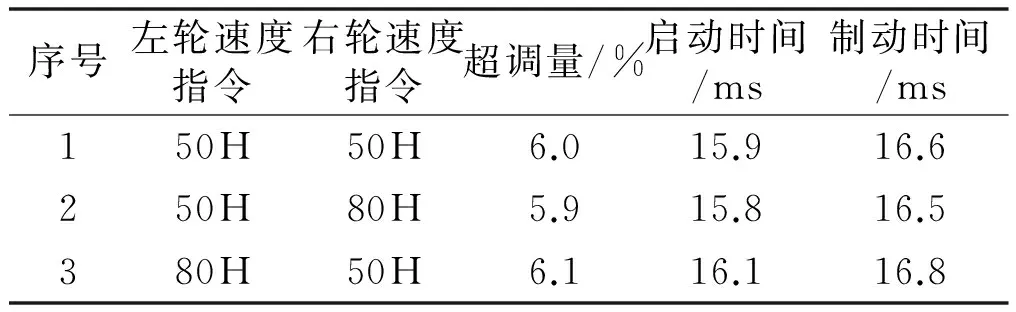
表1 機(jī)器人啟動、制動時間Tab.1 Starting and braking time of robot

表2 機(jī)器人速度測試結(jié)果Tab.2 Test results of robot speed
4 結(jié)束語
本文闡述了以TMS320LF2407A為控制核心的MiroSot足球機(jī)器電機(jī)驅(qū)動系統(tǒng)的軟硬件設(shè)計。基于H橋功率驅(qū)動電路以及PWM脈寬調(diào)制原理,選用16位的DSP芯片TMS320LF2407A與H橋芯片L298組成兩路電機(jī)的可逆調(diào)速系統(tǒng),并采用增量式光電編碼器作速度檢測,設(shè)計了一種直流電機(jī)正、反轉(zhuǎn)驅(qū)動調(diào)速控制電路。該電路克服了傳統(tǒng)單片機(jī)、32位DSP或其他方法存在的電路復(fù)雜、可靠性低、實時性不強(qiáng)等缺點,滿足了機(jī)器人的功能要求,取得了較為理想的控制效果。
參考文獻(xiàn):
[1] 高健,黃心漢,彭剛.基于DSP的集控式足球機(jī)器人控制系統(tǒng)設(shè)計[J].計算機(jī)工程與應(yīng)用,2006(12):19-21.
[2] 周科.RoboCup小型組(F-180)足球機(jī)器人的運動控制和路徑規(guī)劃[D].杭州:浙江大學(xué),2004.
[3] 楊維,殷希梅.一種微小型偵察球無線控制系統(tǒng)的設(shè)計[J].電子設(shè)計工程,2012,20(19):157-160.
[4] 李曉鵬,劉建都.基于Smith算法的模糊PID控制器的設(shè)計[J].微計算機(jī)信息,2009,25(31):66-67.
[5] 陳存,路林吉.基于模糊PID算法的服裝送帶機(jī)控制系統(tǒng)[J].自動化儀表,2017,38(4):37-40.
[6] 繆曉中.一種基于Inte18253與L298N的電機(jī)PWM調(diào)速方法[J].國外電子元器件,2005(12):26-28.
[7] 王蘭蘭.集控式微型足球機(jī)器人的研究與設(shè)計[D].大連:大連理工大學(xué),2005.
[8] 嚴(yán)平鋒,凌志浩,蔣煒.步進(jìn)電機(jī)的控制與檢測系統(tǒng)的設(shè)計與實現(xiàn)[J].自動化儀表,2014,35(4):38-42.
[9] 劉維.全自主足球機(jī)器人控制系統(tǒng)研究[D].贛州:江西理工大學(xué),2008.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
