基于殘余動量時頻特征和SVM的機械臂故障分類研究
2018-04-23 12:12:37邵丹璐王斌銳
自動化儀表 2018年3期
王 帥,邵丹璐,王 凌,張 云,王斌銳
(中國計量大學機電工程學院,浙江 杭州 310018)
0 引言
電機故障是機械臂作業過程中的常見故障之一。在機械臂運行中,對電機故障進行檢測是及時發現故障和安全作業的前提[1-2]。對機械臂故障的準確分類可為有效排除機械臂故障提供支撐[3-4]。
Alessandro等[5]提出一種將環境故障通過殘差形式表現的方法。由于殘差計算需基于精確的系統模型,因此魯棒性較差。K.Suita等[6]通過對比實際驅動器力矩與模型計算得出的力矩,檢測機械臂是否發生故障;Trevor等[7]基于統計學學習方法,研究了支持向量機(support vector machine,SVM)在故障分類問題中的應用。Felzenszwalb等[8-9]用支持向量機來設計分類器,構建故障檢測算法,目標檢測的準確率相對較高。邵丹璐等[10]基于動量導數,設計了殘余動量算子,通過分析碰撞中殘余動量值的變化來檢測柔性臂是否發生碰撞故障。萬書亭等[11]提出了一種基于提升模式的非抽樣小波變換方法。該方法用于對數據信號進行分類處理,對滾動軸承故障能作出有效診斷,但缺乏對故障發生過程的分析。
本文以三自由度機械臂的電機故障為檢測對象,通過支持向量機訓練分類器,得到殘余動量在頻域中的特征向量,并與時域特征向量相結合。通過分析故障源與特征向量變化之間的關系檢測故障,搭建機械臂虛擬樣機聯合仿真平臺,開展故障檢測仿真。對工業機器人開展了試驗驗證。通過仿真和試驗,驗證了故障檢測和分類的有效性。
1 殘余動量信號特征提取
1.1 殘余動量的定義
動力學建模是數學分析的基礎。參考文獻[12]建立的機械臂動力學模型為:

(1)

根據文獻[13]定義殘余動量算子r為:

(2)
式中:放大系數k為大于零的對角陣;p為機械臂的總
能量。
當機械臂與環境發生碰撞時:
(3)
式中:τ為碰撞力矩。
式(2)求導后滿足:
(4)
1.2 時域特征
提取特征向量可降低計算的難度,便于進行故障檢測和分類。殘余動量是一維時變信號,本文采用均值、方差和相關系數組成時域特征向量。
三自由機械臂殘余動量的均值為:
D=[D1,D1,D3]
(5)

方差為:
C=[C1,C2,C3]
(6)

相關系數表示殘余動量值之間的相似性。三自由機械臂殘余動量的相關系數為:
ρ=[ρ12,ρ23,ρ13]
(7)



1.3 頻域特征
(8)
式中:N為數據長度;j=1,2,…,2k為分解頻帶的序號;rjm為重構信號離散點的幅值。
分解層數與計算量有密切關系。為便于計算,選定分解層數k。
三自由機械臂殘余動量的小波包能量譜為:
T=[Er1,Er2,Er3]
(9)
小波包能量譜T共有3×8=24個特征值,時域的均值D、方差C和相關系數ρ共有3×3=9個特征值。
2 機械臂電機故障檢測與分類仿真
2.1 聯合仿真模型
本文基于ADAMS和Simulink,搭建了完整的虛擬樣機仿真平臺,如圖1所示。
虛擬樣機的輸入為3個關節的力矩,輸出為3個關節的角度和角速度,從而便于電機故障模擬和殘余動量計算。
ADAMS模型參數如表1所示。

圖1 虛擬樣機仿真平臺 Fig.1 Virtual prototype simulation platform 表1 ADAMS模型參數Tab.1 ADAMS model parameters

模型長度/mm平均直徑/mm質量/kg大臂31382.8017.78小臂23779.2013.10基座500100.0099.00
機械臂電機故障有多種,忽略基座故障,本文研究的機械臂故障分類如表2所示。
“哎呀,我們楊連長真細心,妹子,快接著。我說有沙棗花吧?你看一串一串的花苞,要開了。”女人的話還沒落地,一片掌聲攆出一片哄笑,田志芳面對這突發的一切,有點不知所措。“跑了這么多天的長途路,終于到家了,妹子,肯定累了,走吧,到你住宿地方休息去。”
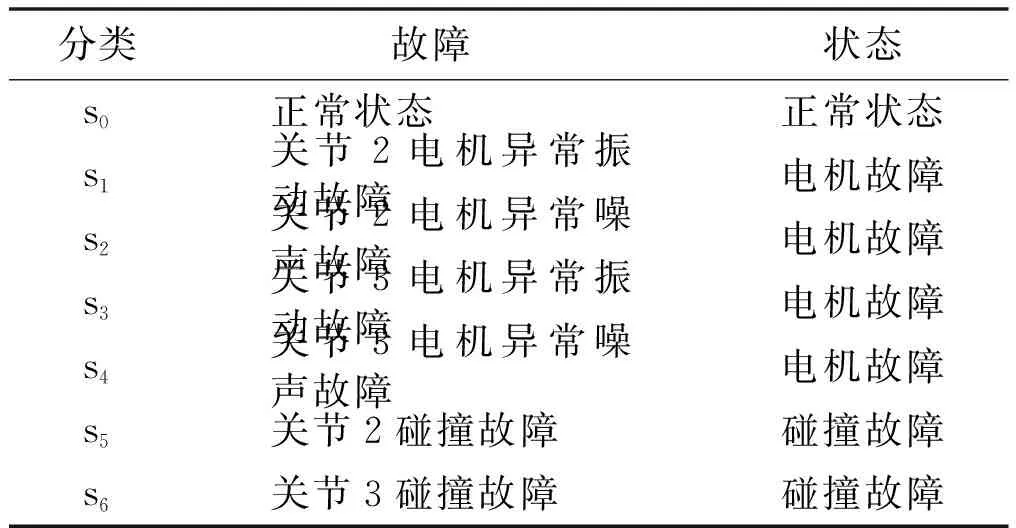
表2 機械臂故障分類Tab.2 Fault classification of manipulator
通過人為設置故障和聯合仿真,得到殘余動量值樣本。利用得到的故障數據樣本,采用基于核函數的非線性軟間隔分類器,即C-支持向量分類機,對出現的故障進行分類。
2.2 殘余動量仿真計算和特征提取
本文通過聯合仿真,共采集200組殘余動量值,其中,機械臂正常狀態數據80組,其余六種故障數據各20組。根據式(5)~式(7)和式(9)計算,并作歸一化處理,樣本數據的均值、方差、相關系數如圖2所示。部分樣本小波包能量譜如圖3所示。由圖2可見,時域特征值變化劇烈且無明顯規律,所以僅從單個時域特征值的變化無法分類故障。由圖3可見,不同故障下的小波包能量譜圖有顯著區別,但規律性不明顯。因此,需要將多個特征值綜合應用于故障分類。

圖2 均值、方差、相關系數圖 Fig.2 The mean,variance and correlation coefficient

圖3 部分樣本小波包能量譜圖 Fig.3 Partial sample wavelet packet energy spectrum
2.3 支持向量機SVM分類
本文任意選取200個樣本中的100個作為訓練樣本,其余樣本作為測試樣本。基于Libsvm工具包,本文采用徑向基核函數,通過交叉驗證法,自動尋優確定最優的懲罰因子c=512和核函數的參數γ=0.007 8。測試樣本的故障分類準確率如表3所示。

表3 不同特征向量分類準確率Tab.3 Classification accuracy of different feature vectors
采用時域和頻域特征值進行故障分類,其準確率高于僅采用時域特征值的故障分類。
3 機械臂故障分類試驗
正常運動試驗結果如圖4所示。

圖4 正常運動試驗結果圖 Fig.4 Experimental results of normal motion
試驗采用工業機器臂,其控制系統如圖5所示。
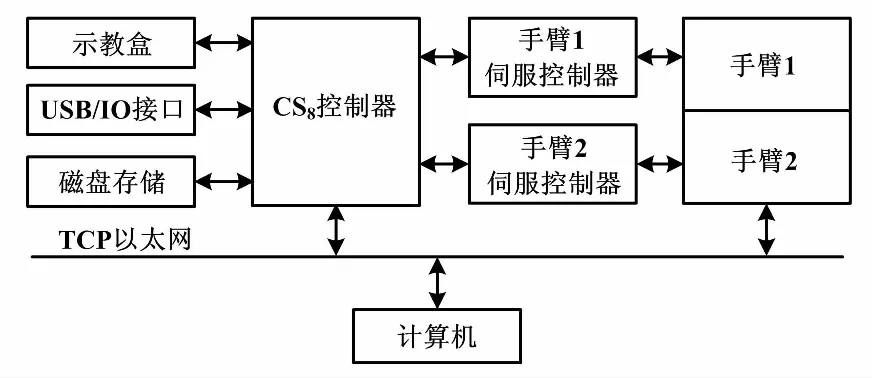
圖5 機械臂控制系統框圖 Fig.5 Block diagram of manipulator control system
碰撞故障試驗結果如圖6所示。

圖6 碰撞故障試驗結果圖 Fig.6 Experimental results of collision fault
對機械臂的第2、3關節運動進行試驗。設關節2為手臂1,關節3為手臂2,其余關節鎖定。試驗過程中,控制手臂1和手臂2逆時針運動30°,并通過在機械臂運動空間中放置工作臺來人為制造碰撞故障。采集機械臂運行過程中的角度和角速度數據,計算得到殘余動量值。
對比圖5和圖6可見,正常運動時殘余動量值的波形周期性變化明顯。當發生碰撞時,殘余動量值有明顯突變。試驗中,計算并提取到的時域和頻域的特征值如表4所示。由于工業機械臂封裝嚴格,電機異常振動和噪聲故障試驗困難。
本文重復上述正常和碰撞故障兩類試驗,并在不同時間點人為制造碰撞故障。將試驗中測得的殘余動量時域和頻域特征值輸入到SVM分類器。測試結果表明,碰撞故障檢測準確率為100%。

表4 試驗所得特征向量Tab.4 Eigenvector obtained by experiments
4 結束語
本文基于殘余動量對機械臂的故障進行檢測與分類,對殘余動量信號的特征提取分類進行了詳細的分析。最后通過仿真和試驗進行了驗證,結果如下。
①電機異常振動、噪聲以及碰撞故障會使得殘余動量值發生變化。但單獨的時域或頻域特征值變化與故障類型之間無明顯規律。
②綜合利用殘余動量值的時域和頻域特征進行故障分類,可以得到較高的準確率。
③設計的基于支持向量機分類算法能夠對多關節機械臂、高維的殘余動量時頻特征向量進行分類。
下一步研究將豐富故障的種類,并對分類器進行優化設計。
參考文獻:
[1] SHI J,LIANG M,GUAN Y.Bearing fault diagnosis under variable rotational speed via the joint application of windowed fractal dimension transform and generalized demodulation:a method free from prefiltering andresampling[J].Mechanical Systems and Signal Processing,2016,68(1):15-33.
[2] BRKOVIC A,GAJIC D,GLIGORIGEVIC J,et al.Early fault detection and diagnosis in bearings for more efficient operation of rotating machinery[J].Energy,2017,136(11):63-71.
[3] 曾艷濤.美國未來15年制造業機器人研究路線[J].機器人技術與應用,2013(3):1-5.
[4] GAN M,WANG C.Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings[J].Mechanical Systems and Signal Processing,2016,72(9):92-104.
[5] DE L A,FERRAJOLI L.Exploiting robot redundancy in collision detection and reaction[C]//Intelligent Robots and Systems,IROS 2008.IEEE/RSJ International Conference on IEEE,2008:3299-3305.
[6] SUITA K,YAMADA Y,TSUCHIDA N,et al.A failure-to-safety "Kyozon" system with simple contact detection and stop capabilities for safe human-autonomous robot coexistence[C]//Robotics and Automation,IEEE International Conference on,IEEE,1995:3089-3096.
[7] HASTIE T,TIBSHIRANI R,FRIEDMAN J.The elements of statistical learning:data mining,inference and prediction[J].Mathematical Intelligencer,2005,27(2):83-85.
[8] FELZENSZWALB P F,GIRSHICK R B,MCALLESTER D.Cascade object detection with deformable part models[C]//Computer Vision and Pattern Recognition (CVPR),2010 IEEE Conference on IEEE,2010:2241-2248.
[9] GIRSHICK R B,FEIZENSZWALB P F,MCALLESTER D.Object detection with grammar models[C]//International Conference on Neural Information Processing Systems,Curran Associates Incorporation,2011:442-450.
[10]邵丹璐,王斌銳,金英連.基于殘余動量的兩連桿柔性臂驅動器故障檢測[J].計量學報,2015,36(3):279-283.
[11]萬書亭,呂路勇,何玉靈.基于提升模式非抽樣小波變換的滾動軸承故障診斷方法研究[J].振動與沖擊,2009(1):170-173.
[12]溫金環.三關節六自由度機械臂運動學及動力學分析和不確定剛性機器人的魯棒軌跡跟蹤控制研究[D].西安:西北工業大學,2002.
[13]DE L A,FLACCO F.Integrated control for pHRI:Collision avoidance,detection,reaction and collaboration[C]//Biomedical Robotics and Biomechatronics (BioRob),2012 4th IEEE, RAS & EMBS International Conference on,IEEE,2012:288-295.
[14]GILLES J.Empirical wavelet transform[J].IEEE Transactions on Signal Processing,2013,61(16):3999-4010.
[15]何學文,卜英勇.基于小波包分解和支持向量機的機械故障診斷方法[J].機械強度,2004,26(1):20-24.
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
當代工人(2020年8期)2020-05-25 09:07:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
科技知識動漫(2016年8期)2016-07-29 20:40:09
汽車維護與修理(2016年10期)2016-07-10 08:17:41
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
