線控轉向系統(tǒng)電子控制單元設計
2018-03-31 07:34:58彭桂枝張明馳
長沙航空職業(yè)技術學院學報 2018年1期
彭桂枝,張明馳
(江陰職業(yè)技術學院,江蘇 江陰 214405)
線控轉向系統(tǒng)取消了方向盤和轉向輪之間的機械連接,轉而用兩個電機分別模擬轉向盤角傳遞特性和力傳遞特性。通過電子控制系統(tǒng)控制電機實現(xiàn)前輪轉向,擺脫了機械系統(tǒng)的局限性,提高了汽車的安全性,操縱穩(wěn)定性,舒適性等。本文主要設計線控轉向系統(tǒng)的電子控制單元,研究了轉向執(zhí)行電機控制算法,提升前輪轉向的跟隨性能。最后搭建了線控轉向系統(tǒng)的試驗臺,對線控轉向系統(tǒng)的控制策略進行了試驗驗證。
1 線控轉向控制器硬件設計
線控轉向電控單元是整個系統(tǒng)的核心部分,電控單元應具備如下功能:
1)實時采集并處理傳感器信號(系統(tǒng)電流傳感器,方向盤轉角傳感器,力矩傳感器等)。
2)具有PWM信號產(chǎn)生模塊,用于控制電機的轉速,正反轉使電機能夠快速、準確的達到目標轉角和力反饋力矩。
3)能通過CAN總線與轉角傳感器、能接收和處理CAN網(wǎng)絡上其他節(jié)點發(fā)送過來的數(shù)據(jù)。
4)ECU與車載電源直接相連,保證ECU的電源模塊為其他模塊提供穩(wěn)定可靠的電壓。
根據(jù)上述要求,本文電控單元電路設計主要包括MCU外圍電路、電源電路、CAN總線通訊電路、無刷電機驅(qū)動電路、電機電流采樣電路、信號采集及處理電路。MCU選擇 MC9S12XET256[1]。圖1為線控轉向系統(tǒng)的設計方案。
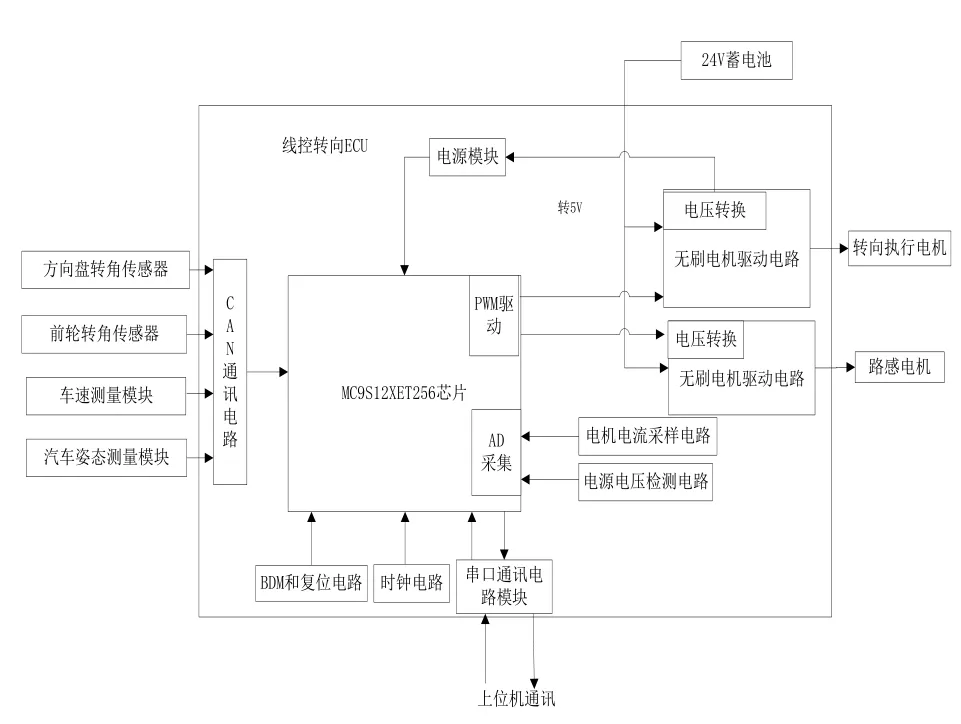
圖1 線控轉向系統(tǒng)的硬件設計
1.1 電源電路設計
ECU中用到的電源主要有對電子元器件供電的5V電源和對直流無刷電機供電的24V電源。車載自身提供24V電源,為了把24V電源轉化成5V,采用了LM5575降壓穩(wěn)壓器汽車級芯片,工作結點溫度范圍為-40℃~+150℃,輸入電壓范圍為6V~75V,輸出電壓可調(diào),最低低至1.225V。設計的電源電路如圖2所示。
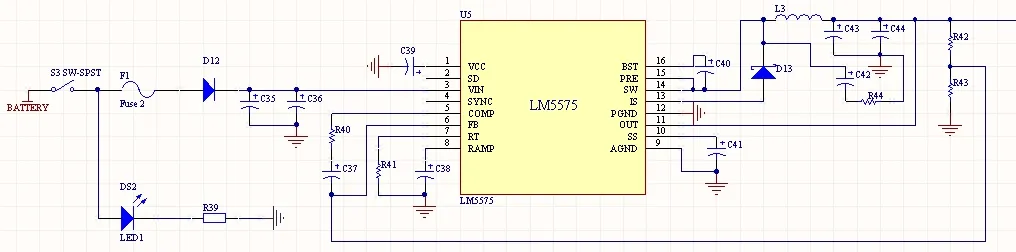
圖2 電源電路
1.2 無刷電機驅(qū)動器設計
本文路感電機和轉向執(zhí)行電機均采用直流無刷電機[2]。三相直流無刷電機通過內(nèi)部霍爾傳感器檢測電機轉子的位置,分別控制六個MOSFET管的截止和導通,產(chǎn)生周期性變化的磁場,實現(xiàn)電機電子換向。基于無刷電機電流大,本文選擇了基于三墾電氣SCM6716芯片設計了無刷電機控制電路。其設計的原理圖如圖3所示:
1.3 CAN通訊模塊
CAN總線通訊過程中使用的硬件包括CAN控制器和CAN收發(fā)器,MC9S12XET256芯片內(nèi)部集成CAN控制器,所以在進行CAN總線電路設計時只需在電路上增加CAN收發(fā)器。本文選擇飛利浦公司研發(fā)遵循ISO11898標準的高速CAN收發(fā)器TJA1050。基于TJA1050設計的CAN總線通訊電路如圖4所示,電路中加入了 ESD保護、EMI增強電路,提高了CAN總線的EMC性能。
1.4 電機電流采樣電路
電流采樣方式有電流傳感器式和精密電阻分流式兩種。電流傳感器式采樣方法具有較高的靈敏度,但是成本高;精密電阻分流式采樣是指在功率管的公共端串聯(lián)一個精密電阻,電阻另外一端接地,電樞電流經(jīng)過采樣電阻時會產(chǎn)生一定壓降,將電阻的壓降經(jīng)過濾波和運放后輸入MCU的A/D采集模塊。綜合實驗室條件,采用精密電阻分流式采樣方法。圖5為電機電流采樣電路。路感電機的三個采樣電阻分別為Rm_s、Rm_s2、Rm _s3,Vm_so為采樣電阻壓降,三個采樣電阻并聯(lián)是為了對電機電流進行分流,這樣可以防止由于電機的瞬時電流過大而對采樣電阻產(chǎn)生損壞。所以路感電機和轉向執(zhí)行電機的電流分別為:

圖3 無刷電機驅(qū)動電路

圖4 CAN總線通訊電路
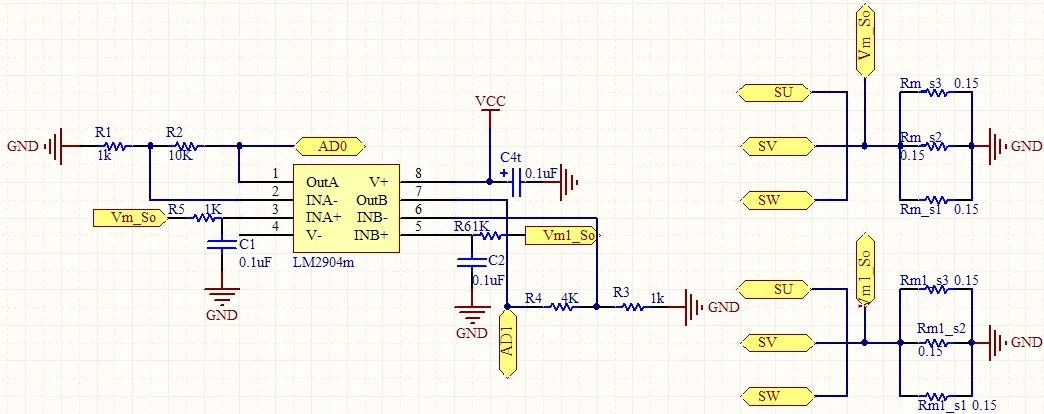
圖5 電機電流采樣電路
1.5 信號采集及處理電路
線控轉向系統(tǒng)中,ECU還需要采集的信號包括前輪轉角和方向盤轉角傳感器信號、車速信號等。由于上述信號都是通過CAN總線與ECU之間通訊,所以不需要對其硬件電路進行設計和處理。
點火信號作為線控轉向系統(tǒng)ECU工作的依據(jù),對點火信號進行采集和處理至關重要。本文設計采用單片機的A/D轉換模塊對點火信號進行采集,點火信號的處理電路如圖6所示。在點火鑰匙閉合的情況下,點火信號輸出為24V,點火信號通過電阻分壓后經(jīng)過一階RC濾波處理,經(jīng)過處理后的信號被單片機的A/D轉換通道采集,然后通過軟件的中斷程序判斷點火鑰匙是閉合還是斷開。若采集到的電壓信號等于標定值,則點火鑰匙閉合,若電壓信號等于零,則點火鑰匙關閉。

圖6 點火電路
BLDC內(nèi)置三個霍爾傳感器感應轉子位置,電機有八根接線,除三根電機的U、V、W線外,還 有 Hall-a、Hall-b、Hall-c、+5V、GND。+5V為電源,GND接地,Hall-a、Hall-b、Hall-c隨電機的轉動輸出的脈沖信號經(jīng)過霍爾信號處理電路到達SCM6716芯片的HallU、HallV、HallW端口用來實現(xiàn)繞組的正確換相控制[3]。霍爾傳感器的處理電路如圖7,將電阻R7、R8、R9上拉至5V電壓;電容C3、C4、C5這三個濾波電容對霍爾信號進行濾波,去除干擾毛刺。
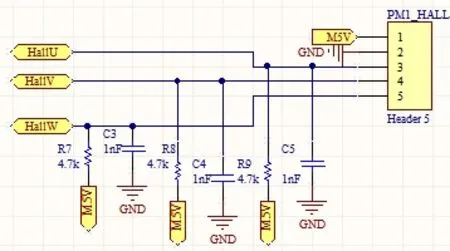
圖7 電機霍爾檢測電路
圖8為蓄電池端電壓檢測電路,采用電阻分壓法檢測蓄電池兩端電壓。蓄電池電壓信號通過電阻分壓后經(jīng)過一階RC濾波處理,經(jīng)過處理后的信號被單片機的A/D轉換通道采集。檢測蓄電池電壓是為了防止蓄電池因過度放電而損壞,單片機根據(jù)采集到的值判斷是否需要欠壓保護和過壓保護。

圖8 電池電壓檢測電路
2 線控轉向算法及軟件設計
本文采用模塊化的設計理念,將軟件設計分為管理應用層和底層驅(qū)動層。管理應用層包括主控程序設計,控制策略程序設計。
2.1 主控程序設計
軟件設計框圖如圖9所示,當線控轉向系統(tǒng)初始化完成后,系統(tǒng)首先采集信號,主要包括方向盤轉角、轉向前輪轉角、轉向執(zhí)行電機電流、力反饋電機電流、車速等。通過變傳動比的方法計算出轉向車輪的目標轉動角度,轉動轉向電機實現(xiàn)前輪轉向和路感模擬。
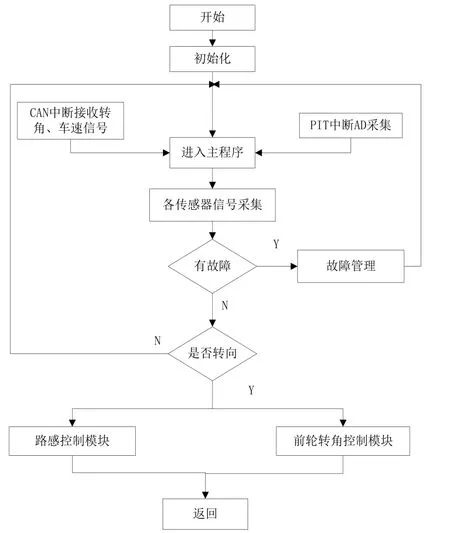
圖9 軟件設計框圖
2.2 控制策略程序設計
線控轉向控制策略主要包括前輪轉角控制和路感控制,本文主要對轉向執(zhí)行控制策略進行研究。控制器接收各傳感器傳來的信號,主要包括車速信號u、方向盤δ和前輪轉角hδ。根據(jù)理想傳動比算法如式(1)所示,得到目標前輪轉角,目標前輪轉角與實際前輪前輪轉角作差進行閉環(huán)控制。其中k1分別為為前后輪側偏剛度;u為汽車縱向速度;a為質(zhì)心到前軸的距離;m為整車質(zhì)量;l為車輛軸距;i為轉向傳動比;hδ為前輪轉角;ω為橫擺角速度。

為獲理想的轉向特性,應設計一個理想的轉向傳動比iω使橫擺角速度增益Ks為一定值。則基于橫擺角速度增益一定的理想傳動比iω可表示為:
3 轉向執(zhí)行電機控制算法研究
滑模變結構控制[4]本質(zhì)上是一種特殊的非線性控制,且非線性表現(xiàn)為控制的不連續(xù)性。本文設計的滑模變結構控制器,運用指數(shù)趨近律在無刷直流電機中進行調(diào)節(jié)控制。
3.1 指數(shù)趨近律
一般,為了減弱滑動模態(tài)下的高頻抖動,可以采用趨近律的方法來設計滑模變結構控制。指數(shù)趨近律可以表示為:

其中,k>0,δ>0,sgn為符號函數(shù),s為滑模切換函數(shù)。在指數(shù)趨近律中,趨近速度從較大的值逐漸減小為零。這樣,在縮短了趨近時間的同時,還使運動點到達切換面時的速度變小。經(jīng)過不斷地調(diào)整指數(shù)趨近律的參數(shù)k和δ,可以減弱控制信號的高頻抖動和滑動模態(tài)運動過程的動態(tài)品質(zhì)。
3.2 滑動模態(tài)的到達條件和穩(wěn)定性
系統(tǒng)的初始點可在狀態(tài)空間的任意位置,但在系統(tǒng)運行后,為了使系統(tǒng)正常啟動滑模運動,則要求運動點在有限的時間內(nèi)到達切換面s=0,即系統(tǒng)的運動必須趨于切換面。到達條件為:

根據(jù)(3.1)式,得


3.3 控制器設計

式中,x1表示轉角誤差,x2表示轉角滑模變結構調(diào)節(jié)器輸入,rθ為給定目標轉角;θ為電機的實際轉角。把(2.4)和(2.5)帶入式(3.3),得系統(tǒng)在狀態(tài)空間的數(shù)學模型為:

式中,c為常數(shù),且c>0。由(3.1)式和(3.5),得

聯(lián)立式(3.4)和式(3.6)得
4 線控轉向試驗臺試驗
由于條件限制不能進行實車試驗,搭建了線控轉向系統(tǒng)試驗臺架,進行了相關的臺架試驗。驗證線控轉向控制策略及電機控制策略能否完成跟隨[5]。在實驗中進行角階躍實驗,給定方向盤轉角的幅值為32°,即目標前輪轉角為2°,對其分別使用PID控制和滑膜變結構控制,仿真步長分別為0.1s和0.01s,仿真時間長為10s,按照GB/T6323.2-94要求,在轉角階躍輸入試驗中,汽車以試驗車速直線行駛,先按輸入方向輕輕靠緊方向盤,消除轉向盤自由行程并開始記錄各測量變量的零線。以盡快的速度(起躍時間不大于0.2s或起躍速度不低于200°/s)轉動轉向盤,使其達到預先選好的位置并固定數(shù)秒鐘(待所測變量過渡到新穩(wěn)態(tài)值),停止記錄。系統(tǒng)響應曲線如圖10、11、12、13所示。

圖10 PID控制下的前輪轉角響應
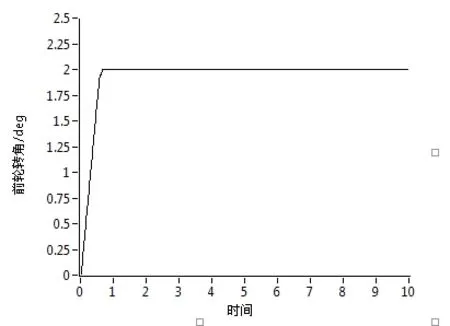
圖11 滑膜變結構控制下的前輪轉角響應

圖12 PID控制下的轉向電機電流響應
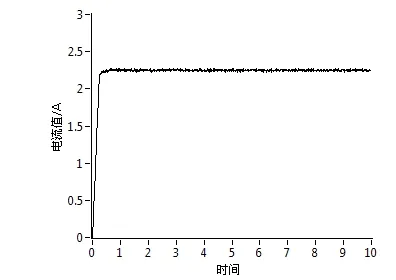
圖13 滑膜變結構控制下的轉向電機電流曲線
該實驗結果表明,當系統(tǒng)采用PID控制時,前輪轉角有0.2deg的超調(diào)量,電機的電流在調(diào)節(jié)過程中略有波動,峰值為4A,而采用滑模變結構控制時,前輪轉角響應速度快,無超調(diào),與仿真趨勢基本吻合,而電流突變量較大,峰值為5.6A,到達穩(wěn)態(tài)的時間相對較短,從上述硬件在環(huán)仿真實驗可以看出,滑模變結構控制在快速性和跟隨性方面都要優(yōu)于PID控制。
5 結論
本文設計了線控轉向控制器的軟硬件,同時研究了轉向執(zhí)行電機的控制策略。設計并搭建了線控轉向系統(tǒng)實驗臺架,對轉向執(zhí)行電機控制策略進行試驗臺試驗,其結果與仿真相符。該模型的建立,為直流無刷電機控制系統(tǒng)的設計、分析和調(diào)試提供了有效的工具和手段,也為線控轉向系統(tǒng)控制算法的實現(xiàn)提供了方便。
[1] 孫同景,陳桂友. Freescale 9S12 十六位單片機原理及嵌入式開發(fā)技術[M]. 北京:機械工業(yè)出版社, 2008:95-108.
[2] 劉軍,厙世軍,羅石,等. 線控轉向系統(tǒng)電機的選擇和ADAMS仿真研究[J],機械設計與制造,2008,(6):81-83.
[3] 劉金琨.滑模變結構控制MATLAB仿真[M]. 北京:清華大學出版社.第二版.2005:87-93.
[4] 張立社. 集成環(huán)境CodeWarrior的使用方法[J]. 計算機光盤軟件與應用,2012,(8):143-145.
[5] 劉文蘋,巢凱年,李平飛. 汽車操縱穩(wěn)定性試驗方法國內(nèi)外標準對比[J]. 四川工業(yè)學院學報, 2004,(3):7-9.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25