貨運站無人機現場作業管理系統研究
2018-03-27 05:53:00周志龍
鐵道貨運 2018年3期
周志龍
(中國神華能源股份有限公司神朔鐵路分公司 運輸管理部,陜西 榆林 719316)
1 貨運站現場作業現狀
貨運站現場作業在鐵路貨物運輸中占有舉足輕重的地位,貨運站現場作業是鐵路貨運安全管理的薄弱環節。貨運站裝卸設備規模大、作業人員多、物流流向復雜,導致貨運站現場作業危險性較高。貨運站現場作業主要包括:接發列車、傳遞票據、檢查關門車、列車試風檢查、檢查車號、現車確認及貨物裝載檢查等工作。近年來,隨著鐵路開行重載列車、擴能改造等一系列措施的實施,列車運行速度提高、密度增加,重載列車數量增多,給鐵路運輸生產安全帶來考驗,提高了貨運站現場作業人員接發列車、監視列車作業及運行、車站現在車管理等作業的工作難度[1]。目前,貨運站現場作業主要存在以下問題。
(1)作業人員素質有待提高。如果作業人員經驗欠缺或作業時精神狀態不佳、注意力不集中,都會造成事故隱患。在接發列車作業中,助理值班員接到值班員現場接車的指令后存在不出場作業的情況,或即使出場也沒有嚴格按“三面六看”(三面為面對車頭、正面列車、面對車位,六看為遠看裝載、近看走行、棚車看車門車窗、敞車看裝載篷布、罐車看排油孔罐蓋、守車看標志) 要求作業。同時,當有隱患的車輛發生事故時很難追責查清事故發生的具體位置和時間,無法確認是否因為該助理值班員的疏忽引起的事故。
(2)作業風險難以避免。當貨運站列車頻繁交會時,作業人員接發列車需要經常穿越線路,有時還需翻越車輛,部分人員甚至存在鉆車現象,對作業人員的人身安全構成嚴重威脅[2]。
(3)作業實時監控效果不佳。當助理值班員在站臺上接發列車、監視列車運行時,只能看到列車的一側,如果列車另一側發生問題就不易被發現;當 2列車在站內會車時,助理值班員無法監視另一側列車的運行狀態。另外,助理值班員還會由于列車運行速度提高,有些安全隱患不易發現。
隨著列車開行密度加大、重載列車數量增加,人工現場作業可靠性降低。近年來,無人機技術發展迅猛,采用無人機系統代替鐵路貨運站部分現場作業的可能性越來越高[3]。
2 貨運站無人機現場作業管理系統分析
2.1 無人機現場作業管理系統作業內容
(1)接發列車作業。助理值班員在接發列車時需“三面六看”[4],確保通過列車裝載加固、車輛狀態無異常。另外,在觀察走行部時還需配合聽覺檢查制動閘瓦有無抱閘現象。而無人機只需要加裝視頻及音頻傳輸系統,即可將現場列車運行情況及聲音實時傳送回室內系統中并保存,室內人員對傳輸回的音視頻信息進行人工分析,同時根據無人機數據庫內的非正常運行數據進行計算機輔助分析。
(2)辦理交接手續。現場需要向司機交接貨票、列車編組順序表、調度命令、制動效能證明書及行車憑證等,一般由助理值班員、貨運員與司機辦理交接手續,由于票據一般較輕,完全可以由無人機攜帶交付。對無人機加裝票據盒,將需要交付的票據放入盒中,加鎖后控制無人機飛往交付對象即可,接收者按下票據盒上的確認按鈕后票據盒開啟,同時確認信息通過無線傳輸回控制室并保存。
(3)非正常行車信號顯示及引導接車。非正常行車種類較多,最常見的現場作業有:現場確認進路是否空閑,道岔開通位置是否正確,顯示引導信號及手信號。由于現場進路的確認需要雙人檢查、雙人確認,信號的顯示需要由助理值班員在指定位置用信號旗 (信號燈) 顯示,行車憑證需要由助理值班員親自交給司機。通過無人機的視頻傳輸系統,由室內操作人員確認進路情況;需要顯示信號時,通過無人機的視覺信號和聽覺信號顯示裝置,由操作人員控制無人機在合適位置顯示需要的信號;需要向司機交付行車憑證時,由操作人員控制無人機向司機交付憑證。
(4)檢查“關門車”。“ 關門車”是指關閉制動支管上的截斷塞門,車輛能通風,但本身不起制動作用。編入列車的關門車數不超過現車總輛數的6%,超過 6% 時,按規定計算閘瓦壓力,并填發制動效能證明書交與司機。為確保列車在緊急制動時能及時緊急制動,貨物列車對關門車編掛位置應嚴格限制:關門車不得掛于機車后部 3 輛車之內;列車中連續連掛不得超過 2 輛;列車最后一輛不得為關門車;列車最后第 2、第 3 輛不得連續關門[4]。為確認列車中關門車的數量及位置,目前一般由助理值班員現場檢查確認。通過無人機視頻傳輸系統,由操作人員控制無人機沿列車逐輛檢查,需要填發制動效能證明書時也可由無人機交接。
(5)列車簡略試驗。為確保列車自制動機正常工作,在列車停留超過 20 min 或更換機車等情況下需要進行簡略試驗。在簡略試驗時,作業人員需要到列車的最后一輛車通知司機制動,然后觀察車輛的制動缸鞲鞴桿處于推出狀態以及閘瓦處于抱緊車輪狀態;再通知司機緩解,觀察制動缸鞲鞴桿處于縮回狀態以及閘瓦處于脫離車輪狀態。通過無人機視頻傳輸系統,由操作人員控制無人機在規定位置檢查,并將信息傳輸回系統保存。
(6)確認現車、檢查車號及車底、檢查貨物裝載狀態。列車到達貨運站裝車前,需要確認現車、車號,并檢查車底,裝車后由工作人員檢查貨物裝載加固狀態。目前雖然有現車管理系統和車號識別系統,但仍然存在個別車號無法識別的現象,這種情況下一般需要由貨運員現場檢查車號。通過無人機視頻傳輸系統,由操作人員控制無人機到現場檢查無法識別的車號、檢查車底和貨物裝載加固狀態,并將信息傳輸回系統保存。
2.2 無人機現場作業管理系統優點
貨運站無人機現場作業管理系統可以提高作業的安全性,實時監控作業進程,提高作業效率,對貨運站作業管理水平提升具有重要意義。采用無人機代替貨運站現場作業有以下優點。
(1)減少作業人員現場作業,確保作業人員安全。鐵路運輸生產中安全第一,采用無人機代替部分現場作業,可以減少作業人員在站場作業頻率和作業時間,極大地消除了現場作業的安全隱患。以橫越線路為例,很多作業人員為了方便會違章作業鉆車底橫越線路,存在人員安全隱患。而由無人機現場作業,可以避免人身傷亡事故發生。
(2)輔助計算機分析,提高列車可靠性。以接發列車為例,根據實際情況對列車可能出現的各種非正常運行狀態進行分析,包括列車車門開關狀態、列車車輛外觀狀態、制動閘瓦狀態等情況進行重點分析,采集各種非正常運行狀態的圖像及音頻數據,設計智能算法,輔助計算機分析,提高現場作業可靠性[3]。
(3)加強無人機作業記錄,實現作業全過程追溯查詢。傳統的人工作業不具備可追溯性,無法監測現場是否作業,發生事故也很難追責。無人機現場作業管理系統可以將貨運站現場作業全過程記錄,保證記錄的追溯查詢。
(4)優化作業流程管理,節約人員成本。貨運站外勤作業種類多,需要設置助理值班員、貨運員、車號員等諸多崗位,站場規模較大的貨運站還要分區域配備各崗位人員。無人機現場作業管理系統可以將部分工種合并、作業地點統一,優化貨運站作業管理,同時還能減少崗位人員的配備,節約成本。
3 貨運站無人機現場作業管理系統設計
3.1 功能設計
貨運站無人機現場作業管理系統主要應用于接發列車作業及運行監控、信號顯示、列車簡略試驗和文件交接等方面,根據無人機現場作業管理系統在貨運站現場作業的應用,提出貨運站無人機現場作業管理系統功能。包括:監控模塊、信號顯示模塊、文件交接模塊、通信模塊和數據庫模塊等 5 個模塊。
(1)監控模塊。該模塊主要包括列車運行狀態監控、現車管理、裝車檢查等。根據實際情況對列車可能出現的各種非正常運行狀態進行分析,包括列車裝載加固狀態、列車走形情況、列車車廂走形、列車鋼軌是否有異物進行重點分析,采集各種非正常運行狀態的音視頻數據[5]。研發“鐵路列車無人監控系統”智能算法,采用智能視覺和深度學習算法對采集到的樣本圖像數據進行數據仿真分析,通過仿真計算獲取合理的邊界條件,根據得出的邊界條件判斷列車是否正常運行,對不正常運行的列車給出狀態告警。
(2)信號顯示模塊。該模塊主要顯示視覺信號和聽覺信號。視覺信號包括地面信號機顯示的紅色、黃色、綠色、白色等基本顏色。聽覺信號應能夠模仿口笛、號角鳴示方式,根據長聲、短聲及音響間隔顯示不同信號。
(3)文件交接模塊。文件交接模塊包括文件容納、交接確認和遙控無人機。文件容納應能容納鐵路行車中各種常見的文件,如貨票、調度命令、行車憑證等且保證密閉不遺漏。交接確認應保證相關文件被接收者接收后確認信息及時回傳至系統。
(4)通信模塊。通信模塊是以完整作業過程為對象,通過構建貨運站無人機現場作業系統網絡,實現無人機傳輸貨運站現場作業數據信息的功能。無人機數據傳輸可采用 2.4GHz 無線 WiFi 或無人機測控鏈路,實現人工對無人機的操控,以及無人機采集到數據與系統之間的交流[6]。
(5)數據庫模塊。數據庫模塊是基于 MongoDB的數據庫,該數據庫結構利于進行大數據挖掘分析,便于后續數據分析,實現對列車狀態的有效檢測。數據庫模塊主要用于存放列車非正常運行狀態數據、信號顯示數據、指令及操縱數據等。
3.2 架構設計
貨運站無人機現場作業管理系統基于無人機巡航,能夠實現對鐵路貨物運輸的安全監控。貨運站無人機現場作業系統技術架構分為硬件層、系統支撐層、應用層和用戶訪問層 4 個層面。貨運站無人機現場作業管理系統總體技術架構如圖 1 所示。
貨運站無人機現場作業管理系統總體技術架構中各層面的組成及功能如下。
(1)硬件層。硬件層由無人機、高清攝像頭和信號燈組成,是無人機監控系統運行的物質基礎。根據本系統的功能定性,無人機需配備高清攝像頭、音頻接收器、信號燈設備及文件容納盒。
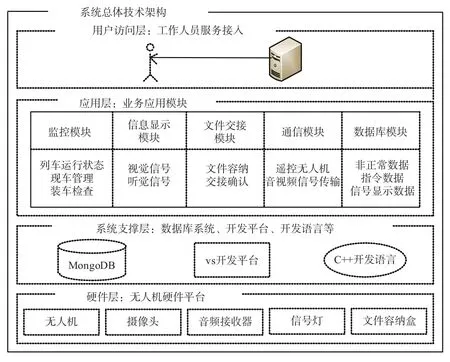
圖?1 ?貨運站無人機現場作業管理系統總體技術架構Fig.1 Unmanned aerial vehicle system functional module diagram
(2)系統支撐層。系統支撐層是由數據庫系統、軟件工具、開發/運行支撐平臺構成。無人機監控系統采用具有非結構化文檔數據存儲功能的 MongoDB數據庫系統,數據庫開發平臺采用基于C++ 語言的Visio Studio 開發平臺。
(3)應用層。應用層是由用戶業務處理的各子系統或功能模塊構成。整個應用層的業務子系統或功能模塊,充分共享系統支持層的組件和對象,進行功能和屬性封裝,實現自由組合的功能模塊配置。
(4)用戶訪問層。用戶訪問層是工作人員接入界面。工作人員通過賬戶登陸系統,實現對無人機的操縱及回傳信息的實時分析,從而對列車作業及運行實時監控和處理[7-8]。
3.3 流程設計
貨運站無人機現場作業管理系統流程主要包括:通知接發列車、非正常接發列車、交接票據和收回無人機等 4 個方面。貨運站無人機現場作業管理系統流程圖如圖 2 所示。
(1)通知接發列車。車站值班員通知無人機操縱人員接發列車股道和位置,操縱人員控制無人機飛至作業地點,當列車經過無人機作業地點時,操縱人員通過無人機系統監控模塊實時監控判斷列車運行狀態,同時無人機現場作業管理系統會將收集到的音視頻數據回傳至后臺分析,然后判斷列車運行狀態是否正常,當有異常情況時,操縱人員通知車站值班員及時處理。
(2)非正常接發列車。非正常接發列車作業時操縱人員控制無人機飛至作業地點,通過無人機系統監控模塊檢查列車進路是否空閑,當列車進路空閑符合信號開放條件時,操縱人員根據晝夜及天氣情況顯示視覺、聽覺信號,當機車通過信號機后信號顯示完畢。
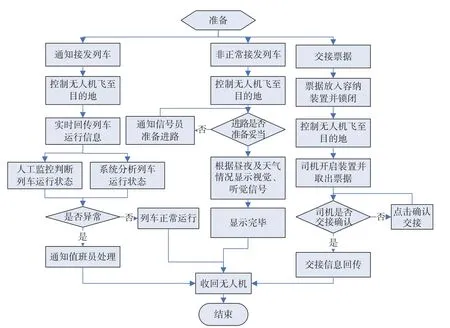
圖?2 ?貨運站無人機現場作業管理系統流程圖Fig.2 System technical architecture diagram
(3)交接票據。車站與司機交接票據時,操縱人員將需要交接的票據放入無人機票據容納裝置并采取鎖閉措施后控制無人機飛至司機室窗口處,司機開啟容納裝置取出票據后點擊無人機上的確認接收按鈕,然后將交接信息回傳至后臺數據庫。
(4)收回無人機。操縱人員確認通知接發列車、非正常接發列車和交接票據等作業完成后,控制無人機沿固定作業飛行通道飛回操縱室。
4 結束語
隨著科學技術的不斷進步,無人機系統在日常生活生產中的應用也越來越廣泛,將無人機現場作業管理系統應用于貨運站現場作業中,不僅有利于提高貨運站現場作業安全,而且極大程度提高貨運站現場作業效率,降低貨運站現場作業成本。無人機現場作業管理系統在貨運站現場作業中的應用,在一定程度上有助于優化貨運站作業流程,為外勤作業崗位的精簡合并提供可能。然而,雖然通過無人機現場作業管理系統可以替代大部分貨運站外勤人員的現場作業,但是仍然有部分現場作業無法替代,如現場防溜鐵鞋的設置與撤除。因此,需要進一步研發能夠實現此類功能的無人機現場作業管理系統,預期可以使貨運站現場作業實現“無人化”。
參考文獻:
[1]曲思源. 鐵路運輸組織管理與優化[M]. 北京:中國鐵道出版社,2017.
[2]武中凱. 深入推進鐵路貨運組織改革若干問題研究[D].成都:西南交通大學,2014.
[3]周志龍,劉凱強. 基于離散事件的貨運站通過能力仿真研究[J]. 鐵道運輸與經濟,2017,39(13):69-74.ZHOU Zhilong,LIU Kaiqiang. Research on Freight Station Capacity Simulation based on Discrete Event[J].Railway Transport and Economy,2017,39(13):69-74.
[4]中國鐵路總公司. 鐵路技術管理規程[A]. 北京:中國鐵道出版社,2014.
[5]胡文娟,張 翔,陳俊杰. 無人機監管服務系統的設計與實現[J]. 中國民航飛行學院學報,2017,28(3):5-8.
[6]張 波,陳知秋,劉 洋,等. 無人機導航監控系統設計與實現[J]. 測控技術,2009,28(2):68-70.
[7]王宴平,浦 丁,葛 銳,等. 鐵路貨場數字化技術方案研究[J]. 鐵道貨運,2018,36(2):31-37.WANG Yanping,PU Ding,GE Rui,et al. Research on a Technical Plan for the Digitalization of Railway Freight Marshalling Yards[A]. Railway Freight Transport,2018,36(2):31-37.
[8]宋 剛,梁建宏. 競賽用無人機視覺導航系統研究[J].機器人技術與應用,2017(1):39-43.SONG Gang,LIANG Jianhong. Research on Visual Navigation System of UAV for Competition[J]. Robot Technique and Application,2017(1):39-43.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2019年3期)2019-02-01 06:12:26
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
兒童故事畫報(2013年3期)2013-06-24 05:40:30