基于航測數據的防空雷達部署研究
2018-03-22 08:03:00,,,,
雷達科學與技術 2018年1期
關鍵詞:區域
, , , ,
(火箭軍工程大學機電工程系, 陜西西安 710025)
0 引言
現代防空作戰中,隨著武裝直升機、巡航導彈和各種精確制導武器的大量使用,低空和超低空突防已成為對地攻擊的典型作戰樣式[1]。防空雷達在作戰過程中擔負著發現敵方來襲目標的任務,其發現空中來襲目標的能力將直接影響武器系統的整體作戰效能。防空雷達發現目標的能力不僅與雷達自身性能及來襲目標特性相關,還與雷達部署陣地周圍環境密切相關。實際部署過程中,由于地形或地物對天線波束的遮擋,雷達對低空目標的探測距離和連續跟蹤能力會受到極大的制約[2]。為合理部署防空雷達,提高其作戰能力,需要作戰指揮人員對雷達擬部署區域周圍的陣地環境有詳細了解。
目前,構建數字戰場環境的方法主要是利用航空、航天遙感技術獲取地球空間信息,并基于此地理信息數據構建虛擬戰場[3]。該方法適合于大范圍區域地理信息數據的獲取,但受平臺自身運行軌道、周期的限制,其成圖精度較低、費用昂貴且缺少對局部區域地理信息的詳細數據描述。隨著近幾年無人機技術的迅猛發展,人們也開始利用無人機作為遙感平臺獲取空間信息進行數據處理。該方法具有靈活機動、速度快、成本低、工作量小、可操作性強、可實時監測更新、適用于地形復雜地區等優點。
本文在上述研究的基礎上,選取雷達典型部署環境,利用無人機航測和傾斜測量技術進行野外實地測量,通過對無人機的遙感數據進行處理,構建了實驗區域的三維模型,獲得了點云數據、數字表面模型、地形遮蔽角等地理信息,驗證了基于無人機航測進行雷達部署研究的可行性和易于操作性,為作戰指揮人員合理選取雷達部署陣地提供了可視化的、定量的、客觀的輔助決策依據。
1 無人機航測系統集成
如圖1所示,無人機航測系統的組成一般包括以下幾個部分:無人機飛行平臺、地面配套設備、通信設備和遙控設備[4]。本次實驗構建的無人機航測系統實物模型如圖2所示,該航測系統中的無人機飛行平臺為大疆Phantom 4無人機,該無人機及其搭載的攝像獲取設備的主要參數如表1、表2所示。

圖1 無人機航測系統構成
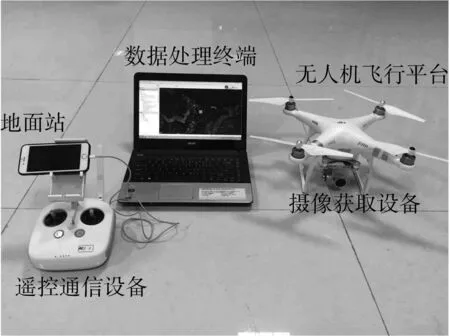
圖2 無人機航測系統實物模型

表1 飛行器參數
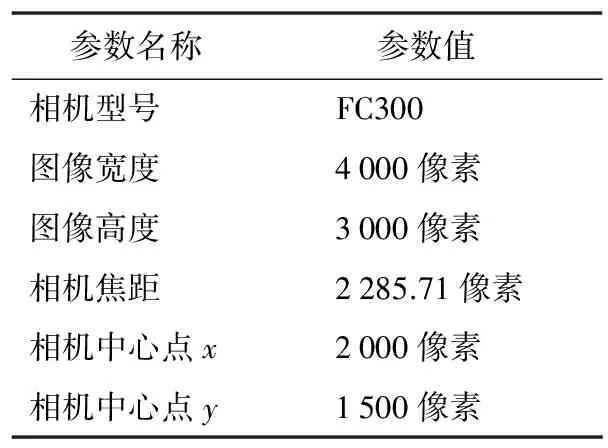
表2 攝像獲取設備參數
2 無人機航測數據獲取及處理
在無人機航測系統及其所搭載的傳感器均能滿足獲取指定分辨率影像的基礎上,為確保無人機航測系統獲取的數據質量能滿足成圖和三維建模要求,需在執行飛行任務前對無人機的攝影航高、航攝分區及航線設計進行合理規劃并遵守相應作業原則。
2.1 航測數據獲取
2.1.1 航攝分區
為保證航攝范圍內獲取的影像能達到指定地面分辨率、航向重疊度,在保證成圖精度的前提下,進行航攝分區[5]。航攝分區應遵循以下原則[6]:
1)分區界線與圖廓線保持一致;
2)分區內地形高度差不大于1/6攝影航高;
3)在滿足地形高差且能夠保持航線的直線性的前提下,分區跨度可盡量劃大,能完整覆蓋整個攝區;
4)當地面高差突變,地形特征差別顯著或有特殊要求時,可以突破圖廓劃分航攝分區。
2.1.2 攝影航高
攝影航高是指攝影瞬間航攝相機物鏡中心相對于攝影區內平均高程面的距離[6]。在相機焦距給定情況下,攝影航高越小,則成圖比例尺越大,分辨率越高,且有利于地理信息數據獲取,但攝影航高過小,會導致航測工作量過大,需根據欲測繪地形圖及三維建模的精度來綜合確定。
根據圖3,可推導出攝影航高、鏡頭焦距、影像分辨率、像元尺寸間的關系式:
(1)
式中,H為攝影航高(m),f為鏡頭焦距(mm),a為像元尺寸(μm),GSD為地面分辨率(m)。

圖3 航攝高度與地面分辨率的關系
2.1.3 航線設計
航線設計與無人機飛行平臺、地面分辨率、重疊度、航高、飛行速度、測區范圍和曝光參數等密切相關,是保證數據正確、滿足生產要求的前提條件[7]。
根據上述作業原則,本次實驗設置照片重疊度為85%,攝影航高為150 m,分別在相機傾角為90°(垂直向下)和45°時對340 m×256 m的區域進行數據采集,如圖4所示。
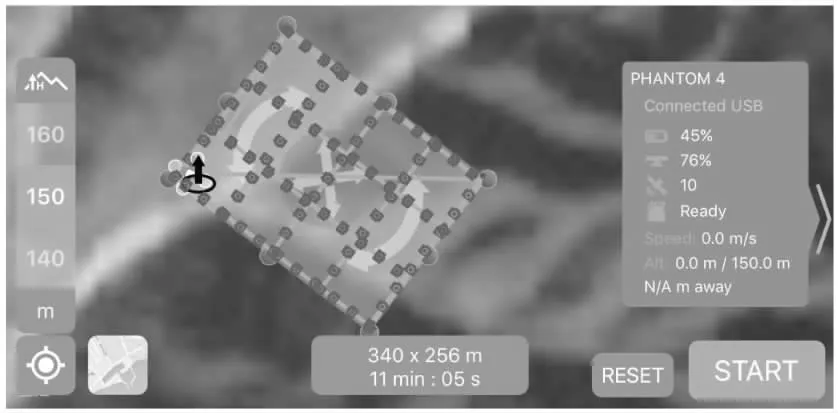
圖4 航測任務過程圖
2.2 航測數據處理
將本次無人機所攜相機分別在傾角為90°和45°時采集到的數據(如圖5所示)導入數據處理終端,由Pix4Dmapper處理后即可獲得航測區域豐富的地理信息成果,包括航測區域的三維模型(如圖6所示)和點云數據等(圖5中所示高度為絕對高度,2.1.3節中所提攝影航高150 m為相對高度)。具體操作步驟如下:
1)新建航測項目;
2)添加影像;
3)選擇合適坐標系、合理設置相機參數(參照表2);
4)進行空三加密處理,并生成三維模型。
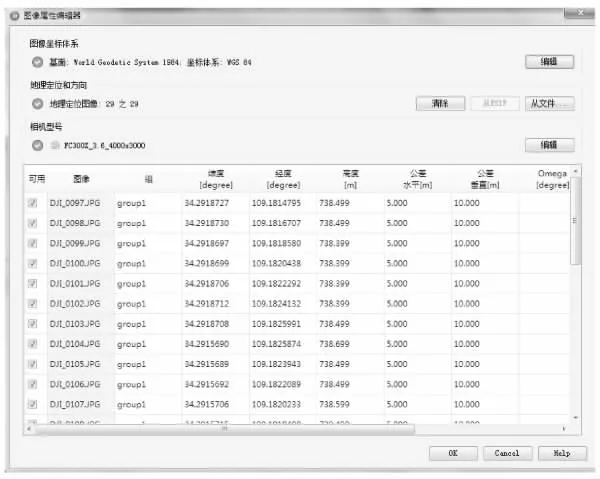
圖5 部分航測數據
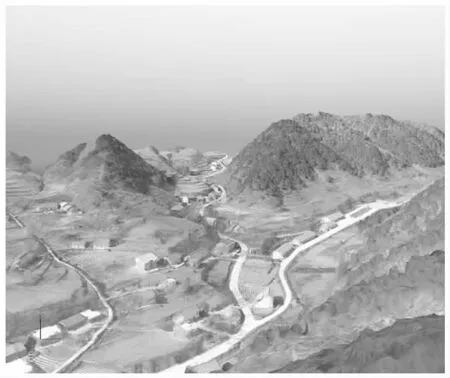
圖6 航測區域三維模型
在三維模型中,可通過仰視、俯視等360°旋轉操作,直觀、準確地確定目標區域的位置、邊界、長度、面積、體積、高程等信息,方便作戰指揮人員根據作戰實際合理選取雷達陣地,及時調整雷達部署方案,提高武器系統的整體作戰效能。
本次航測實驗由于沒有添加地面控制點,導致其航測數據有些許偏差。該偏差通過量取三維模型中的長度、高度信息與實際的長度、高度信息進行對比可得。通過對比分析,可得本次試驗長度精度為98%,高度精度為95%。該數據精度已滿足一般運用要求,如需進一步提高精度,要根據具體飛行任務合理布設地面控制點。通過前期的實驗驗證,合理布設控制點后,數據誤差將小于1%。
3 基于分段插值的地形遮蔽角計算與繪制
3.1 地形遮蔽角計算
遮蔽角計算一般要求每隔一定角度就必須計算給定范圍內所有方向上的遮蔽角[8]。文獻[2]中作者利用徠卡全站儀進行地形遮蔽角數據的采集,該方法雖然精度較高,但工作量較大,在雨、雪、霧天氣采集數據較為困難繁瑣,而且該方法只能得到已測點位的遮蔽角數據,倘若更換部署陣地需重新測量。
為實現地形遮蔽角的快速提取和計算,本文基于無人機航測數據,利用ArcGIS的空間分析功能和字段計算功能實現了航測區域內任意一點的地形遮蔽角的快速計算,其具體步驟如下:
1)將由Pix4Dmapper處理后獲得的點云數據導入ArcMap,經數據格式轉換后即可獲得航測區域的數字高程模型(DEM),如圖7所示;
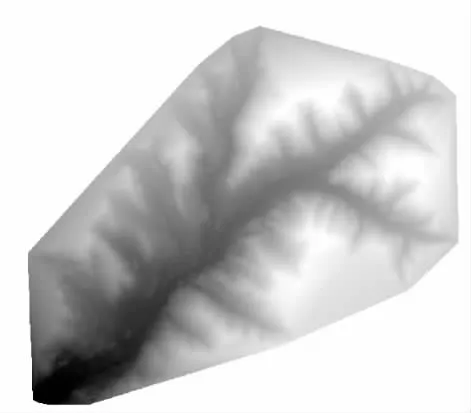
圖7 航測區域數字高程模型
2)在航測區域內任取一點A,以該點為圓心,創建半徑400 m的緩沖區;
3)以點A為觀察點,利用“構造視線”功能,構建緩沖區域內按順時針方向排列的144條視線(間隔2.5°);
4)繪制間距為6 m的等高線,輸出等高線與各視線的交點集,該點集將保留各視線的屬性;
5)通過“多值提取至點”,獲得點集中各點的高程數據;
6)利用“連接和關聯”功能,獲得點集中各點相對于觀察點A的距離;
7)根據式(2),利用ArcGIS的字段計算功能,計算出點集中的所有點相對于觀察點A的地形遮蔽角:
(2)
式中,φ為地形遮蔽角,Δd為距離差,Δh為高程差;
8)利用ArcGIS的統計分析功能,提取出各視線方向上最大地形遮蔽角。
獲取地形遮蔽角過程如圖8所示,提取的部分視線方向最大地區遮蔽角如圖9所示。

圖8 獲取地形遮蔽角過程圖
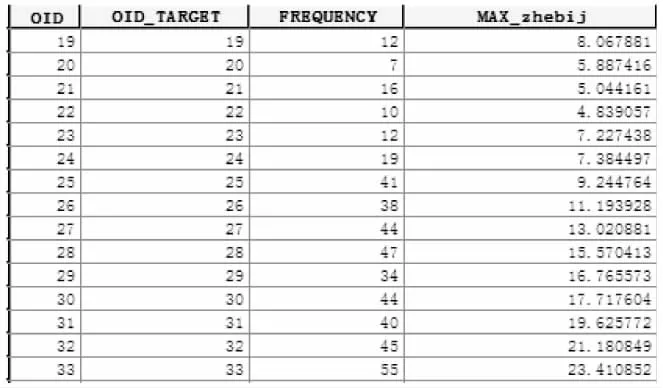
圖9 部分視線方向最大地形遮蔽角
3.2 地形遮蔽角繪制
地形遮蔽角的大小及分布情況將決定雷達的具體部署位置,因此需對擬部署陣地的地形遮蔽角進行精確計算和繪制。該項工作的關鍵在于利用零散的地形遮蔽角數據擬合出一條遮蔽角曲線,使得該曲線能在一定的誤差范圍內盡量逼近遮蔽物輪廓線。結合文獻[2]中幾種常見插值方法的比較,本文基于所獲得的航測區域內144條視線方向上的離散遮蔽角數據,利用分段三次Hermite插值方法實現雷達遮蔽角的精確計算和繪制。

1)Ih(x)∈C′[a,b];

3)Ih(x)在每個小區間[xi,xi+1]上是三次多項式。
則可得每個分段區間[xi,xi+1]上兩點三次Hermite插值多項式:

(3)

現將該插值方法運用到航測區域觀察點A的遮蔽角數據中進行插值效果驗證(插值精度1°),圖10為利用該插值方法擬合的遮蔽物輪廓圖(地理真北方向作為方位0°的基準),圖11為地形遮蔽角圖。
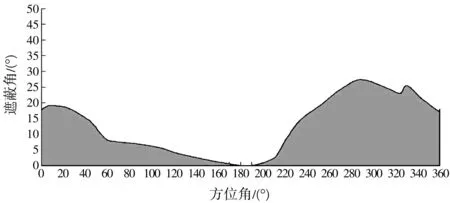
圖10 遮蔽物輪廓擬合圖
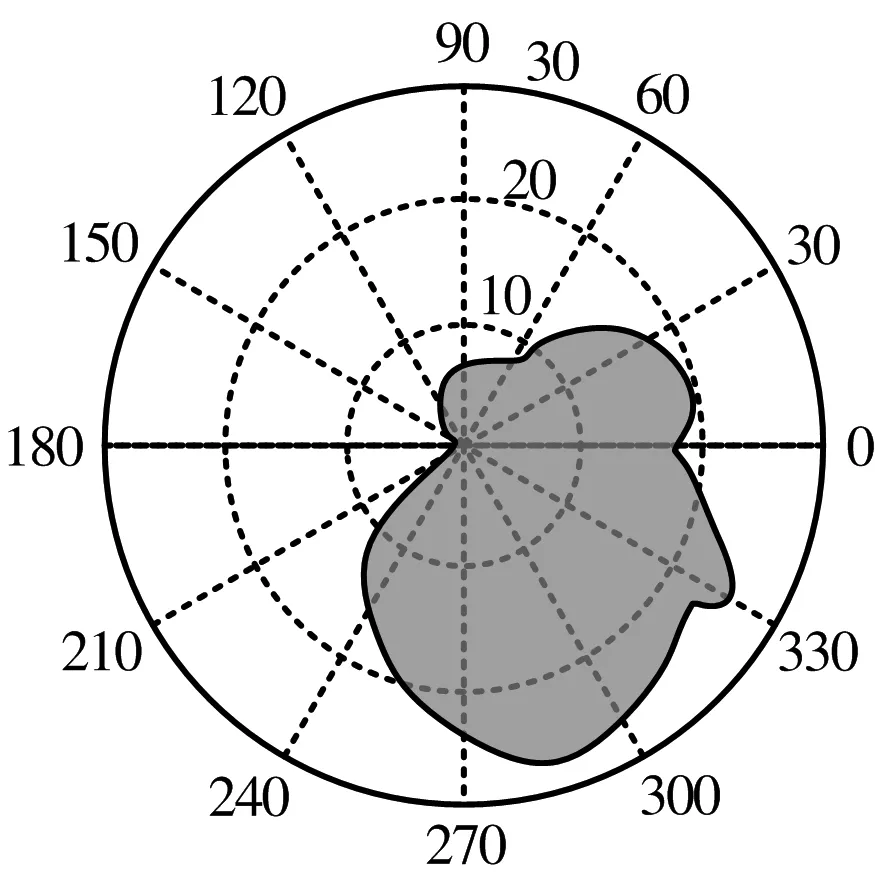
圖11 遮蔽角圖
遮蔽角對雷達探測的主要影響在于縮短了雷達的探測范圍[9]。當雷達探測低空遠距目標時,除了要考慮遮蔽角因素外,還需考慮地球曲面和大氣折射。由圖12所示空間關系可得的雷達探測距離、遮蔽角與來襲目標飛行高度滿足如下關系式:
(4)
式中,D為雷達探測距離,Rg為考慮大氣折射后等效的地球半徑,Rg=8 500 km,H為來襲目標高度,θ為遮蔽角。由式(4)可得,雷達最大探測距離將隨著遮蔽角的增加而大幅減小,而當目標飛行高度降低時,雷達可能發現目標的最大距離也成比例縮短[10]。因此,作戰指揮人員在選取雷達陣地時,在可用地面面積和地形坡度滿足條件的基礎上,一方面要盡量選擇遮蔽角位置較小的位置,另一方面部署時要盡量升高雷達天線,減小遮蔽角。
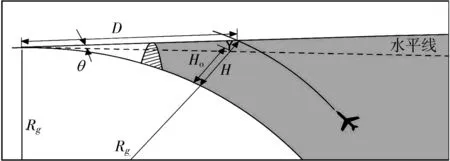
圖12 地球曲面上的雷達探測示意圖
4 防空雷達部署的應用舉例
為進一步說明上述基于無人機航測的防空雷達部署方法,本文假定某一特定作戰空情來具體闡述其運用中的一些問題。
4.1 作戰想定
1)敵方基本情況
接上級情報部門通報,遠程預警機探測到有敵方多架作戰飛機從正南方向(方位角180°)來襲,欲對我方某要害目標(位于本次航測區域)實施空襲。
2)我方基本情況
我方預設有兩處雷達待部署陣地(A,B),防空雷達一臺(最大探測距離50 km)。
4.2 部署分析
現利用航測數據處理終端(Pix4Dmapper)及ArcGIS地理信息系統,對航測區域內擬部署雷達陣地(A,B)按照第2,3節所述方法進行處理編輯獲得其雷達遮蔽角數據,根據式(4)可得當雷達分別部署于A區域和B區域時的理論極限探測范圍,如圖13、圖14所示。
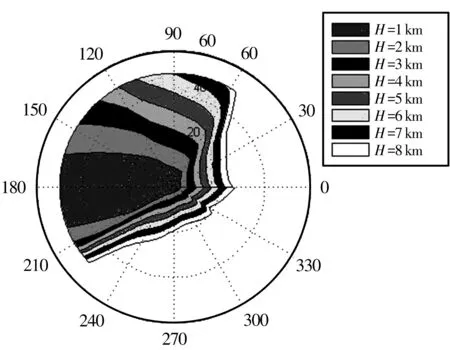
圖13 A區域雷達極限探測距離
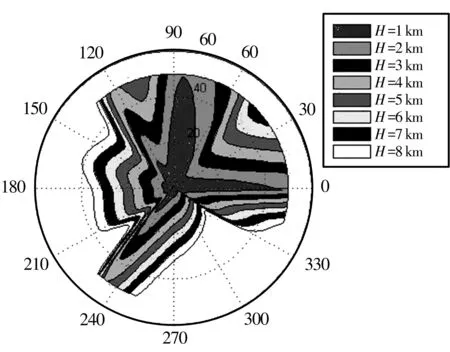
圖14 B區域雷達極限探測距離
圖13和圖14分別顯示了雷達部署在A區域和B區域時對不同高度的敵方來襲目標的理論極限探測距離。從圖中不難分析出:不管雷達部署在A區域還是B區域,來襲目標的飛行高度越高,雷達能在越遠的距離上發現來襲目標;當飛行高度足夠高時,地形遮蔽角將不再影響雷達的極限探測距離,此時該雷達的探測范圍將達到最大(50 km)。若雷達部署在A區域將對方位角60°~220°的來襲目標有較大的探測距離;若雷達部署在B區域將對方位角0°~130°,220°~250°,330°~360°的來襲目標有較大的探測距離。
本次作戰根據預警信息,敵方的主攻方向為正南方向(方位角180°),故將防空雷達部署在A區域將能盡早探測到來襲目標,為防空導彈或防空高炮摧毀來襲目標預留足夠的時間。
5 結束語
本文提出的基于無人機航測數據進行雷達部署研究的方法為作戰指揮人員合理選取雷達陣地、優化雷達部署提供了直觀形象、科學定量的輔助決策依據。該方法經實驗驗證滿足可操作性,具有較好的實踐意義和指導意義。本文雖然只分析了該方法對防空雷達部署的影響,但由于陣地環境對防空高炮和防空導彈的部署同樣有影響[2],故該方法也適用于為防空高炮和防空導彈的部署提供參考依據。該方法在本次試驗中由于航測區域范圍(340 m×256 m)有限只考慮了半徑400 m范圍內地形遮蔽角對雷達最大探測距離的影響,且存在航測作業流程規范需進一步提高的問題,需要在下一步工作中加以改進,以提高構建模型和航測數據的精度和準確性。
[1] 王豪.大區域多尺度雷達遮蔽角計算關鍵技術研究與實現[D]. 鄭州: 解放軍信息工程大學, 2011.
[2] 張迪哲. 基于分段插值的雷達遮蔽角繪圖的研究和實現[D]. 西安: 西安電子科技大學, 2015.
[3] 陳嬌. 無人機航攝系統測繪大比例尺地形圖應用研究[D]. 昆明: 昆明理工大學, 2013.
[4] 楊瑞奇,孫健,張勇. 基于無人機數字航攝系統的快速測繪[J]. 遙感應用, 2010(3):108-111.
[5] 國家測繪局.低空數字航空攝影規范: CH/Z 3005—2010 [S]. 北京: 測繪出版社, 2010.
[6] 楊永明. 無人機遙感系統數據獲取與處理關鍵技術研究[D]. 昆明: 昆明理工大學, 2016.
[7] 王佩軍,徐亞明. 攝影測量學: 測繪工程專業[M]. 2版. 武漢: 武漢大學出版社, 2010:93-107.
[8] 黃太山. 巧用空間疊置分析計算遮蔽角[J]. 北京測繪, 2014(6):55-57.
[9] 陳達,段耀峰,王劍. 地形影響下的雷達探測范圍建模與三維可視化[J]. 地礦測繪, 2012, 28(4):21-23.
[10] 首照宇. 地形遮蔽的雷達低空探測效能研究[J]. 微計算機信息, 2005,21(12):208-209.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15