面向連通性的空中分層網(wǎng)絡(luò)中繼航線規(guī)劃方法*
2018-03-16 03:36:04張兆晨錢寧
現(xiàn)代防御技術(shù) 2018年1期
關(guān)鍵詞:規(guī)劃
張兆晨,錢寧
(中國電子科技集團(tuán)公司 第28研究所 信息系統(tǒng)工程重點實驗室,江蘇 南京 210007)
0 引言
飛機編隊執(zhí)行任務(wù)通常以空中分層網(wǎng)絡(luò)的形式進(jìn)行組網(wǎng)。空中分層網(wǎng)絡(luò)為飛行編隊間的信息交互提供了通信保障,主要包括一個拓?fù)湎鄬Ψ€(wěn)定的骨干網(wǎng)和若干動態(tài)移動的子網(wǎng),具有鏈路質(zhì)量不穩(wěn)定、通信距離受限、拓?fù)渥兓靃1]等特點。由于空中分層網(wǎng)絡(luò)受到能量、干擾等內(nèi)外部因素的限制,為保證網(wǎng)絡(luò)的連通性,最有效的手段是增加飛行器作為通信中繼節(jié)點。因此,如何以盡量小的代價部署中繼節(jié)點并生成中繼航線,成為亟待解決的問題。
從研究對象、實現(xiàn)連通性的方法以及針對的問題等方面看,目前的研究成果還不能滿足空中分層網(wǎng)絡(luò)的連通性需求。一些文獻(xiàn)[2-5]主要針對拓?fù)涔潭ā⒉浑S時間變化的無線傳感器網(wǎng)絡(luò)(wireless sensor networks, WSN)的中繼節(jié)點放置問題,解決方法通常是調(diào)整節(jié)點發(fā)射功率以實現(xiàn)拓?fù)渲羞叺倪B通,不能適用于節(jié)點分布區(qū)域廣、通信能源受限的空中分層網(wǎng)絡(luò)。還有一些文獻(xiàn)的研究對象雖然是空中網(wǎng)絡(luò),但是由于優(yōu)化目標(biāo)、限制條件等不同,都不能解決航空平臺拓?fù)潆S時間快速變化的網(wǎng)絡(luò)連通性問題。例如,文獻(xiàn)[6]提出一種無人機群網(wǎng)絡(luò)連通性的實時動態(tài)規(guī)劃方法,主要關(guān)注中繼節(jié)點的位置對任務(wù)的滿足程度,沒有給出具體的中繼節(jié)點路徑生成方法;文獻(xiàn)[7]研究了優(yōu)化自組織網(wǎng)絡(luò)連通性的無人機部署和移動算法,但其目的是保證網(wǎng)絡(luò)的4種連通屬性,沒有考慮采用的無人機數(shù)量最小;文獻(xiàn)[8]提出了一種WSN網(wǎng)絡(luò)維護(hù)和恢復(fù)算法,雖然尋找到了中繼的最小個數(shù)和位置,但其目標(biāo)是提高網(wǎng)絡(luò)生存時間和重建網(wǎng)絡(luò)連接;文獻(xiàn)[9]提出了一種動態(tài)環(huán)境下的無人機多目標(biāo)協(xié)同路徑規(guī)劃方法,其目標(biāo)是任務(wù)風(fēng)險和任務(wù)延遲的最小化;文獻(xiàn)[10]對空中自組織網(wǎng)絡(luò)進(jìn)行了中繼節(jié)點優(yōu)化配置,但是僅在單一時刻最優(yōu)配置,沒有考慮整個飛行過程中的全局優(yōu)化;文獻(xiàn)[11]提出了一種無人機飛行模型,但主要針對無人機為地面移動自組網(wǎng)提供中繼服務(wù)的問題;文獻(xiàn)[12]在中繼個數(shù)固定的條件下實現(xiàn)了網(wǎng)絡(luò)連通和中繼運動距離最小,但沒有考慮中繼個數(shù)最小化。文獻(xiàn)[13]提出一種增加固定節(jié)點以提高網(wǎng)絡(luò)連通性的算法,但是不能滿足飛行編隊前出執(zhí)行任務(wù)的通信保障需求。
為此,針對現(xiàn)有空中網(wǎng)絡(luò)連通性實現(xiàn)方法、中繼節(jié)點部署等問題中存在的不足,本文提出一種面向空中分層網(wǎng)絡(luò)連通性的中繼航線規(guī)劃方法,該方法從整個航線全局優(yōu)化的角度出發(fā),以盡可能增加中繼節(jié)點在不同時間、空間上的復(fù)用率為目標(biāo),生成中繼節(jié)點的航線,在解決空中分層網(wǎng)絡(luò)通信問題的基礎(chǔ)上,減少了中繼節(jié)點飛行器的使用量。
1 問題分析
空中分層網(wǎng)絡(luò)的骨干網(wǎng)拓?fù)湎鄬Ψ€(wěn)定,主要為編隊提供各種信息業(yè)務(wù)支撐,節(jié)點之間通過寬帶鏈路連接;子網(wǎng)拓?fù)渥兓^快,由子網(wǎng)長機和子網(wǎng)成員飛機組成,主要執(zhí)行機動任務(wù),子網(wǎng)節(jié)點之間以及子網(wǎng)與骨干網(wǎng)節(jié)點之間通過窄帶鏈路連接。空中分層網(wǎng)絡(luò)是飛機編隊完成任務(wù)的基礎(chǔ),航線規(guī)劃[14]要求保證空中分層網(wǎng)絡(luò)拓?fù)渲泄歉删W(wǎng)節(jié)點之間以及骨干網(wǎng)與子網(wǎng)長機節(jié)點之間連通,以支持?jǐn)?shù)據(jù)信息的交互。
由于鏈路支持的通信距離與鏈路端機的發(fā)射功率有關(guān),而無限制地增加鏈路端機的發(fā)射功率不但增加了飛機的負(fù)擔(dān),影響續(xù)航時間,而且往往不可能實現(xiàn)。因此,保證連通性最有效的方法是增加中繼節(jié)點。飛機編隊在飛行前必須依據(jù)任務(wù)進(jìn)行航線規(guī)劃,而任務(wù)航線規(guī)劃的結(jié)果并沒有考慮通信保障問題。本文以任務(wù)航線規(guī)劃的骨干網(wǎng)和子網(wǎng)長機節(jié)點的飛行路徑為輸入,面向上述空中分層網(wǎng)絡(luò)的連通性需求,提出一種空中分層網(wǎng)絡(luò)中繼航線規(guī)劃方法,在不改變飛機編隊規(guī)劃任務(wù)航線的條件下,生成中繼節(jié)點的航線,并且考慮增加盡量少的中繼節(jié)點,同時中繼節(jié)點飛行盡量短的距離,以降低通信保障的成本,保證算法的優(yōu)化。
設(shè)任務(wù)航線規(guī)劃結(jié)果中不存在位于相同經(jīng)緯度、不同高度上的節(jié)點,即將本文的規(guī)劃問題簡化為二維平面網(wǎng)絡(luò)問題。為便于形式化描述本文的方法,定義以下參數(shù):
(1)t:輸入的任務(wù)航線規(guī)劃時間點,t=0,1,…,Nt,Nt為任務(wù)航線時長;
(2)U:骨干網(wǎng)和子網(wǎng)長機節(jié)點組成的拓?fù)洌?/p>
(3)dij:節(jié)點i與節(jié)點j之間的距離;
(4)RKDL:寬帶鏈路的可通信距離;
(5)RZDL:窄帶鏈路的可通信距離;
(6)eu(t):t時刻點u的連通分量,即t時刻與點u可以連通的所有點的集合;
(7)Eac:拓?fù)銾的全連通邊的集合,邊的權(quán)重為邊的長度;
(8)Tmst:拓?fù)銾的MST;
(9)Tadj:優(yōu)選后的拓?fù)銾的生成樹,即選擇的拓?fù)銾的節(jié)點之間的連接邊組成的集合;
(10)Ere:中繼段向量的連接邊的集合;
(11)Econ:優(yōu)選后的中繼段向量的連接邊的集合;
(12)vre:中繼節(jié)點的最大運動速度。
需要說明的是,本文生成樹優(yōu)選只適用于2個飛機間添加1個中繼節(jié)點的情況,因為當(dāng)2個飛機間距離急劇增大時,可能會造成添加中繼節(jié)點個數(shù)劇增,故假設(shè)本文航線規(guī)劃在2個飛機間的最大距離小于等于相應(yīng)鏈路的可通信距離2倍的情況下進(jìn)行。
2 中繼航線規(guī)劃方法
2.1 生成樹優(yōu)選策略
為添加盡量少的中繼節(jié)點,需要盡可能增加中繼節(jié)點在不同時間、空間上的復(fù)用率。因此,在計算t時刻拓?fù)銾的生成樹時,本文考慮了t-1時刻中繼節(jié)點的位置。通過比較t時刻拓?fù)銾的MST邊的頂點的連通分量是否與t-1時刻相同,來決定t時刻生成樹的邊的選擇。若當(dāng)t時刻MST的一條邊的兩端點的連通分量與t-1時刻相同,且在t-1時刻這2個連通分量由另一條邊通過中繼節(jié)點連接,則選擇t-1時刻生成樹中連接這2個連通分量的邊,并入t時刻的生成樹。
首先,根據(jù)Kruskal算法[15]計算拓?fù)銾的MST為Tmst,然后對Tmst進(jìn)行優(yōu)選,生成樹優(yōu)選策略的具體過程如下:
(1) 對Tmst的每一組邊(u,v),判斷邊的長度duv與鏈路的可通信距離R的大小關(guān)系;其中,若邊(u,v)由寬帶鏈路連接時,則R=RKDL,若邊(u,v)由窄帶鏈路連接時,則R=RZDL。
(2) 若duv>R,則表示邊(u,v)不可連通,執(zhí)行下一步;否則對Tmst中的邊(u,v)不作替換。
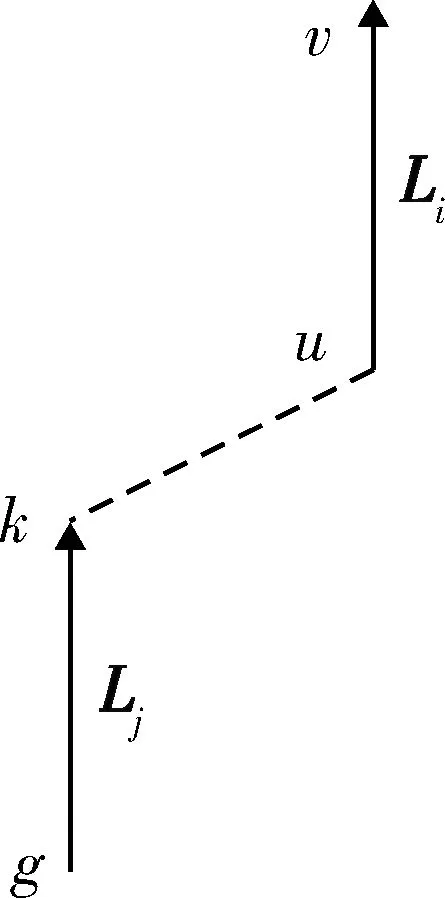
(3) 計算點u和v在t時刻的連通分量eu(t)和ev(t),若eu(t)=eu(t-1)且ev(t)=ev(t-1),并且eu(t-1)和ev(t-1)由另一條邊(g,k)通過中繼節(jié)點連接,如圖1所示,則將Tmst中的邊(u,v)替換為邊(g,k);否則,對Tmst中的邊(u,v)不作替換。
(4) 判斷是否對Tmst的每一組邊(u,v)均進(jìn)行過處理,若均進(jìn)行過處理,則得到優(yōu)選后的生成樹Tadj,否則返回步驟(1)。
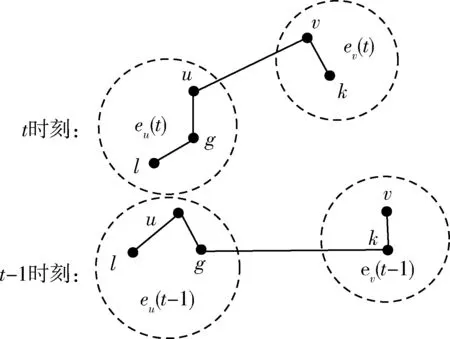
圖1 生成樹優(yōu)選Fig.1 MST optimization
2.2 確定中繼節(jié)點位置并生成中繼段向量
對2.1節(jié)中得到的t時刻的生成樹Tadj中的每一組邊(u,v),計算中繼節(jié)點的位置,并連接生成中繼段向量:
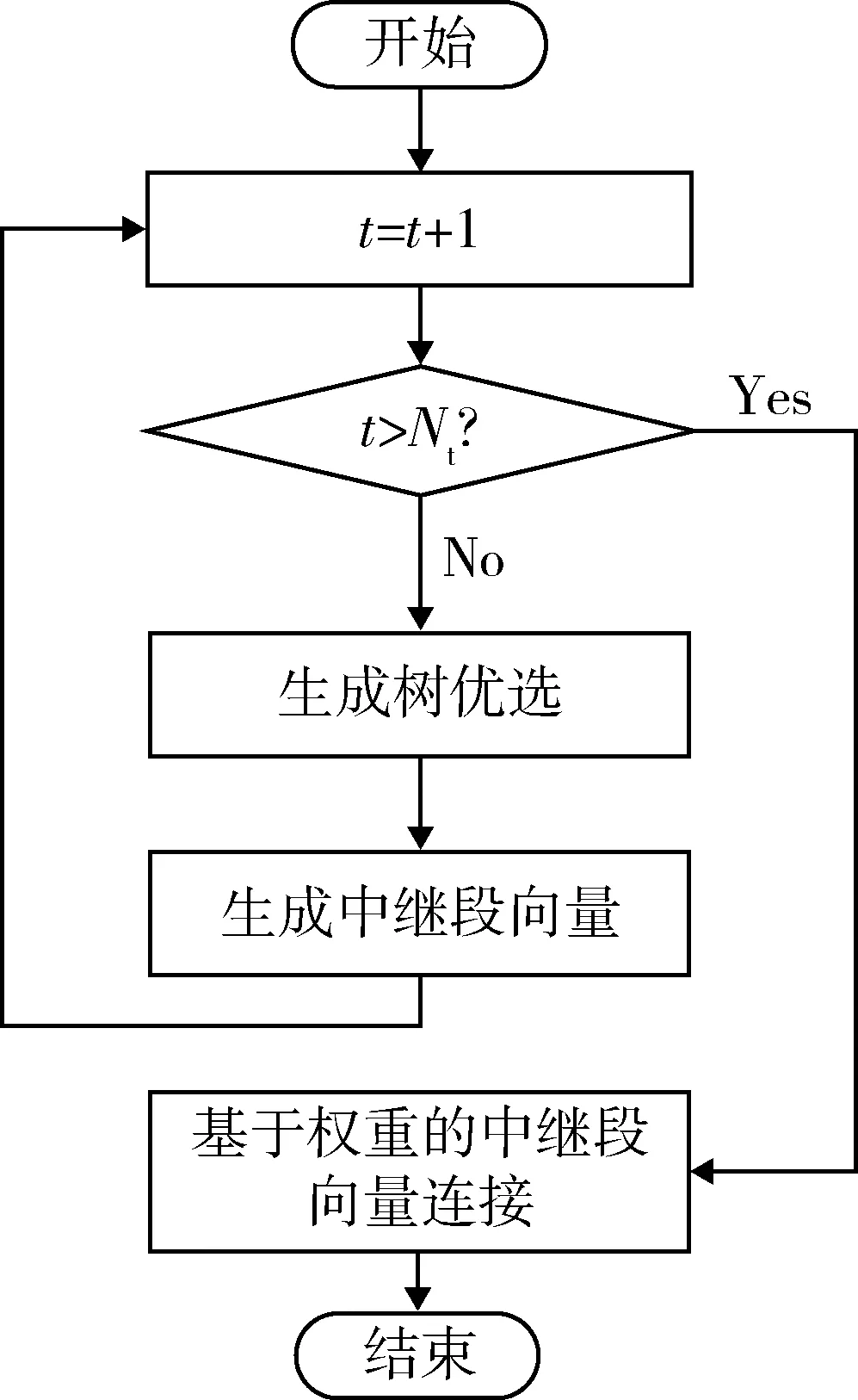
(1) 若R (2) 查找(u,v)在t-1時刻是否存在中繼,若不存在中繼,則在(u,v)的中點添加中繼節(jié)點zuv(t),并執(zhí)行步驟(4);否則設(shè)(u,v)在t-1時刻存在中繼節(jié)點zuv(t-1),并執(zhí)行步驟(3)。 (3) 在(u,v)的中點添加中繼節(jié)點zuv(t),并將zuv(t-1)到zuv(t)用帶箭頭的直線連接,形成t-1時刻到t時刻的中繼段向量Li,如圖2所示。 (4) 判斷是否對Tadj中的每一組邊(u,v)均進(jìn)行過處理,若均進(jìn)行過處理,則得到拓?fù)銾在t-1時刻到t時刻的中繼段向量,否則返回步驟(1)。 圖2 連接中繼段向量Fig.2 Connecting relay segment vector 對任務(wù)航線時長Nt內(nèi)的所有時刻進(jìn)行2.1和2.2節(jié)所述方法的計算,若計算得到的各時間間隔的中繼段向量首尾連續(xù),則將它們連接成為一個向量,從而得到拓?fù)銾在Nt內(nèi)的中繼段向量集合L。下面計算L中可連接的向量,并優(yōu)選和連接中繼段向量,形成各中繼節(jié)點的航線。為了將盡量多的中繼段向量連接起來,并耗費盡量少的中繼節(jié)點飛行時間,以減少增加的中繼節(jié)點的數(shù)量和飛行距離,降低保障連通性的成本,本文考慮將L的中繼段向量的頂點的度,以及中繼節(jié)點在2個中繼段向量間的運動時間作為聯(lián)合權(quán)重,優(yōu)先選擇度較小和耗時較小的邊進(jìn)行連接。基于權(quán)重的中繼段向量連接方法具體過程如下: (1) 計算中繼段向量的可連接邊 對L的任意2個中繼段向量Li和Lj,進(jìn)行以下處理: 1) 設(shè)Li的起始節(jié)點和結(jié)束節(jié)點分別為u和v,Lj的起始節(jié)點和結(jié)束節(jié)點分別為g和k,判斷tk和tu的大小,若tk 圖3 可連接的中繼段向量Fig.3 Relay segment vector can be connected 3) 判斷是否對L中所有的向量Li和Lj均進(jìn)行過處理,若均進(jìn)行過處理,則得到L的可連接邊的集合Ere,之后執(zhí)行步驟(2),否則返回步驟1)。 (2) 優(yōu)選可連接邊并連接中繼段向量 對Ere中的每一條邊(k,u),將與頂點k和u連接的中繼段向量Lj和Li分別各自進(jìn)行首尾連接并刪除向量,然后進(jìn)行以下處理: 3) 計算邊(k,u)的權(quán)重:W=w1w2. 4) 判斷是否對Ere中所有的邊(k,u)均進(jìn)行過處理,若均進(jìn)行過處理,則得到Ere中所有邊的權(quán)重,之后執(zhí)行步驟5);否則返回步驟1)。 5) 按照權(quán)重由大到小的順序,將Ere中權(quán)重W所對應(yīng)的邊(k,u)放入邊集合Econ中,并刪除Ere中的邊(k,u)以及與邊(k,u)的頂點k和u存在公共節(jié)點的邊。 6) 判斷Ere中是否還存在邊,若不存在,則根據(jù)Econ將相應(yīng)的中繼段向量連接,得到中繼節(jié)點的航線,否則返回步驟5)。 下面用一個示例說明上述算法,如圖4a)所示,圖中包含4個中繼段向量和5條可連接邊: 1) 中繼段向量分別各自進(jìn)行首尾連接并刪除向量,計算圖中各邊的權(quán)重w1,如圖4b)所示。 3) 計算各邊的權(quán)重W,如圖4d)所示。 4) 依次按照權(quán)重W由大到小,首先在Ere中取出并刪除邊(a,u),將邊(a,u)放入邊集合Econ中,并且刪除Ere中的邊(k,u)和(c,u);再在Ere中取出并刪除邊(c,g),將邊(c,g)放入邊集合Econ中;最后,在Ere中取出并刪除邊(k,b),將邊(k,b)放入邊集合Econ中;Ere中不存在邊,選擇結(jié)束,得到的Econ中包含的邊為(a,u),(c,g),(k,b);可以看出,原本4個中繼段向量連接成為1條中繼航線,如圖4e)所示。 圖4 優(yōu)選中繼段向量的連接邊示例Fig.4 Example of optimizing connected edges of relay segment vectors 至此,基于空中分層網(wǎng)絡(luò)的連通性需求,生成了中繼節(jié)點航線,實現(xiàn)了對中繼節(jié)點的航線規(guī)劃,同時保證了算法在降低飛行成本上的優(yōu)化作用。 中繼航線規(guī)劃方法的流程如圖5所示。在任務(wù)航線時長Nt內(nèi)的每個時間點,對拓?fù)銾進(jìn)行2.1和2.2節(jié)所述的生成樹優(yōu)選計算與中繼節(jié)點位置確定,生成每個時間點的中繼段向量。對得到的任務(wù)航線時長Nt內(nèi)的中繼段向量集合L進(jìn)行2.3節(jié)所述的基于權(quán)重的中繼段向量連接,最終生成中繼節(jié)點的航線。 圖5 中繼航線規(guī)劃方法流程Fig.5 Process of the relay route planning method 為了驗證本文算法的有效性和相較傳統(tǒng)算法的優(yōu)化作用,在基于地圖數(shù)據(jù)的顯示平臺上進(jìn)行仿真試驗,分別對生成樹優(yōu)選策略和基于權(quán)重的中繼段向量連接方法進(jìn)行功能試驗和性能對比試驗。顯示平臺中用紅色帶箭頭的折線表示骨干網(wǎng)飛機飛行任務(wù)航線,藍(lán)色帶箭頭的折線表示子網(wǎng)長機飛行任務(wù)航線,黃色線段表示同一時刻2個任務(wù)航線節(jié)點之間的可連通性,綠色帶箭頭的折線表示本算法生成的中繼節(jié)點的飛行航線。 3.1.1 生成樹優(yōu)選策略 以骨干網(wǎng)飛機飛行任務(wù)航線為例進(jìn)行生成樹優(yōu)選策略功能試驗,其中RKDL=200 km,航線規(guī)劃的實際時間間隔為100 s,骨干網(wǎng)飛機速度為250 m/s。如圖6a)為輸入的骨干網(wǎng)飛行任務(wù)航線,對該任務(wù)航線進(jìn)行中繼航線規(guī)劃,生成中繼節(jié)點航線。由于飛行航線具有時序特性,為清楚地表示增加中繼節(jié)點的過程,將任務(wù)航線和中繼航線按照時序進(jìn)行推演,并在時刻1和時刻2進(jìn)行截圖,得到圖6b)和6c)。可以看到,圖6b)時刻的MST為(1,2),(2,3),優(yōu)選的生成樹為(1,2),(2,3);圖6c)時刻的MST為(1,3),(2,3),而經(jīng)過優(yōu)選的生成樹仍然為(1,2),(2,3),因此,本文算法需要添加的中繼節(jié)點個數(shù)為1。若圖6c)時刻不進(jìn)行生成樹優(yōu)選,而直接由MST決定增加中繼節(jié)點的位置,則需要在(1,3)之間增加另一個中繼節(jié)點,由此增加的中繼節(jié)點個數(shù)為2,故通過本文算法的生成樹優(yōu)選策略能夠?qū)崿F(xiàn)增加中繼個數(shù)的優(yōu)化。 圖6 生成樹優(yōu)選試驗Fig.6 Test of MST optimization 3.1.2 基于權(quán)重的中繼段向量連接方法 以骨干網(wǎng)飛機飛行任務(wù)航線為例進(jìn)行基于權(quán)重的中繼段向量連接方法功能試驗,其中RKDL=600 km,航線規(guī)劃的實際時間間隔為1 000 s,骨干網(wǎng)飛機速度為250 m/s。如圖7a)所示為輸入的骨干網(wǎng)飛行任務(wù)航線為拓?fù)?時,生成的中繼段向量為R0,R1,R2,R3,通過本文的中繼段向量連接方法得到2條中繼節(jié)點航線。以拓?fù)?的骨干網(wǎng)飛行任務(wù)航線為輸入(拓?fù)?是在拓?fù)?的基礎(chǔ)上添加了骨干網(wǎng)飛行任務(wù)航線5),進(jìn)行仿真試驗得到圖7b)。可以看出,生成的中繼段向量為R0,R1,R2,R3,R4,通過本文的中繼段向量連接方法得到2條中繼節(jié)點航線;若按照拓?fù)?中中繼段向量連接方式,將R0,R1,R3連接,則將形成3條中繼節(jié)點航線,故通過本文基于權(quán)重的中繼段向量連接方法,能夠?qū)崿F(xiàn)最終生成的中繼節(jié)點航線個數(shù)的優(yōu)化。 圖7 生成樹優(yōu)選試驗Fig.7 Test of MST optimization 3.2.1 生成樹優(yōu)選策略 由于生成樹優(yōu)選策略只對添加中繼節(jié)點個數(shù)不超過1的特定拓?fù)渚哂袃?yōu)化作用,因此,選取5個典型的拓?fù)錇檩斎耄謩e采用傳統(tǒng)MST算法和生成樹優(yōu)選策略進(jìn)行對比試驗。其中,RKDL=200 km,RZDL=100 km,航線規(guī)劃的實際時間間隔為1 000 s,骨干網(wǎng)和子網(wǎng)飛機速度均為250 m/s,試驗結(jié)果如圖8所示,2種算法增加的中繼節(jié)點個數(shù)對比如圖9所示。可以看出,本文的生成樹優(yōu)選策略相較MST算法,能夠有效減少增加中繼節(jié)點的數(shù)量。 圖9 中繼節(jié)點個數(shù)對比Fig.9 Comparison of relay node number 3.2.2 基于權(quán)重的中繼段向量連接方法 選取5個典型的拓?fù)錇檩斎耄诒疚纳蓸鋬?yōu)選策略的基礎(chǔ)上,分別采用隨機連接中繼段向量方法和本文的基于權(quán)重的中繼段向量連接方法,對中繼航線規(guī)劃進(jìn)行對比試驗。其中,拓?fù)?的RKDL=600 km,RZDL=600 km,拓?fù)?,3,4,5的RKDL=600 km,RZDL=500 km,航線規(guī)劃的實際時間間隔均為1 000 s,骨干網(wǎng)和子網(wǎng)飛機速度均為250 m/s,試驗結(jié)果如圖10所示,2種中繼段向量連接方法增加的中繼節(jié)點個數(shù)對比如圖11所示。可以看出,本文基于權(quán)重的中繼段向量連接方法相較隨機連接中繼段向量方法,能夠有效減少增加中繼節(jié)點的數(shù)量。 圖10 中繼段向量連接方法試驗Fig.10 Test of relay segment vector connection method 圖11 中繼節(jié)點個數(shù)對比Fig.11 Comparison of relay node number 飛行編隊前出必須基于任務(wù)進(jìn)行航線規(guī)劃,空中分層網(wǎng)絡(luò)的航線規(guī)劃需要滿足連通性需求,為飛機編隊協(xié)同完成任務(wù)提供通信保障。本文以飛行編隊任務(wù)航線規(guī)劃結(jié)果為輸入,通過在骨干網(wǎng)和子網(wǎng)的任務(wù)飛機節(jié)點之間添加中繼節(jié)點的方式,實現(xiàn)空中分層網(wǎng)絡(luò)的連通性。本文在MST算法的基礎(chǔ)上考慮了相鄰時刻生成樹的變化對中繼節(jié)點個數(shù)的影響,實現(xiàn)了生成樹優(yōu)選;以中繼段向量的度和中繼節(jié)點的飛行時間為權(quán)重,達(dá)到了將盡量多的中繼段向量連接的目的。仿真結(jié)果驗證了該方法能夠有效減少使用的中繼節(jié)點個數(shù)。空中分層網(wǎng)絡(luò)可能具有各種復(fù)雜的拓?fù)浣Y(jié)構(gòu),本文的方法只適用于兩點之間的中繼節(jié)點個數(shù)不超過1個的特定拓?fù)涞倪B通性規(guī)劃,適用性受限。后續(xù)研究應(yīng)當(dāng)關(guān)注在航線之間的距離較遠(yuǎn)的情況下,如何保障網(wǎng)絡(luò)連通性并實現(xiàn)解決方案的優(yōu)化。 [1] 趙悅,陳雷,程子傲,等.車載自組織網(wǎng)絡(luò)中基于蟻群算法的簇路由協(xié)議[J].計算機測量與控制,2016,24(10):259-262. ZHAO Yue,CHEN Lei,CHENG Zi-ao,et al.Ant Colony Algorithm Based Cluster Routing Protocol Vehicular Ad Hoc Network[J].Computer Measurement & Control,2016,24(10):259-262. [2] 周濤,邢凱,劉剛,等.利用協(xié)作通信的中繼節(jié)點放置問題研究[J].小型微型計算機系統(tǒng),2013,34(11):2508-2512. ZHOU Tao,XING Kai,LIU Gang,et al.Research on Relay Node Placement via Cooperative Communication[J].Journal of Chinese Computer Systems,2013,34(11):2508-2512. [3] 黃健文,倪衛(wèi)明.一種通過加入中繼節(jié)點以修復(fù)大面積網(wǎng)絡(luò)損壞的能量均衡算法[J].微型電腦應(yīng)用,2013,29(4):58-61. HUANG Jian-wen,NI Wei-ming.An Energy-Efficient Healing Algorithm for Connectivity Restoration in Wireless Sensor Networks through Relay Node Placement[J].Microcomputer Applications,2013,29(4):58-61. [4] AZIZ A A,SEKERCIOGLU Y A,FITZPATRICK P,et al.A Survey on Distributed Topology Control Techniques for Extending the Lifetime of Battery Powered Wireless Sensor Networks[J].IEEE Communications Surveys & Tuyorials,2013,15(1):121-144. [5] NIGAM A,AGARWAL Y K.Optimal Relay Node Placement in Delay Constrained Wireless Sensor Network Design[J].European Journal of Operational Research,2014,233(1):220-233. [6] Andrew N Kopeikin,Sameera S Ponda,Luke B Johnson,et al.Real-Time Dynamic Planning to Maintain Network Connectivity in a Team of Unmanned Air Vehicles[J].IEEE Globecom Workshops,2011,12(1):1303-1307. [7] ZHU Han,A Lee Swindlehurst,LIU K J R.Optimization of MANET Connectivity Via Smart Deployment/Movement of Unmanned Air Vehicles[J].IEEE Transactions on Vehicular Technology,2009,58(7):3533-3546. [8] Ahmed S Ibrahim ,Karim G Seddik,LIU K J R.Connectivity-Aware Network Maintenance and Repair via Relays Deployment[J].IEEE Transactions on wireless communications,2009,8(1):356-366. [9] Manisha Mishra,XU Han,David Sidoti,et al.Multi-Objective Coordinated Path Planning for a Team of UAVs in a Dynamic Environment:19th ICCRTS,2014[C]∥Command and Control Research Program,Washington D.C,USA,June 16-19,2014:30-45. [10] 陳凌,梁加紅,胡志偉,等.無人飛行器Ad Hoc網(wǎng)絡(luò)中基于容錯的中繼節(jié)點配置[J].系統(tǒng)工程與電子技術(shù),2012,34(1):179-184. CHEN Ling,LIANG Jia-hong,HU Zhi-wei,et al.Fault Tolerant Relay Node Placement in UAVs Ad Hoc Networks[J].Systems Engineering and Electronics,2012,34(1):179-184. [11] 徐贊新,袁堅,王鉞,等.一種支持移動自組網(wǎng)通信的多無人機中繼網(wǎng)絡(luò)[J].清華大學(xué)學(xué)報:自然科學(xué)版,2011,51(2):150-155. XU Zan-xin,YUAN Jian,WANG Yue,et al.UAV Relay in Network to Provide Communications Mobile Ad Hoc Networks[J].Journal of Tsinghua University:Natural Science ed,2011,51(2):150-155. [12] 李杰,宮二玲,孫志強,等.航空自組網(wǎng)中面向容錯的中繼節(jié)點速度控制[J].國防科技大學(xué)學(xué)報,2015,37(4):158-164. LI Jie,GONG Er-ling,SUN Zhi-qiang,et al.Relay Speed Control for Realization of Fault-Tolerant Aeronautical Ad Hoc Networks[J].Journal of National University of Defense Technology,2015,37(4):158-164. [13] Morteza Romoozi,VAHIDIPOUR S M,Hamideh Babaei.Improvement of Connectivity in Mobile Ad-Hoc Networks by Adding Static Nodes Based on a Realistic Mobility Model[C]∥The Second International Conference on Machine Vision,Washington D.C,USA,December 28-30,2009:138-142. [14] 張臻,王光磊.基于改進(jìn)蟻群算法的飛行器航跡規(guī)劃[J].指揮信息系統(tǒng)與技術(shù),2011,2(3):30-34. ZHANG Zhen,WANG Guang-lei.Aircraft Route Planning Based on Improved Ant Colony Algorithm[J].Command Information System and Technology,2011,2(3):30-34. [15] 王桂平,王衍,任嘉辰.圖論算法理論、實現(xiàn)及應(yīng)用[M].北京:北京大學(xué)出版社,2012:88-109. WANG Gui-ping,WANG Yan,REN Jia-chen. Algorithm Theory,Implementation and Application of Graph Theory[M].Beijing:Peking University Press,2012:88-109.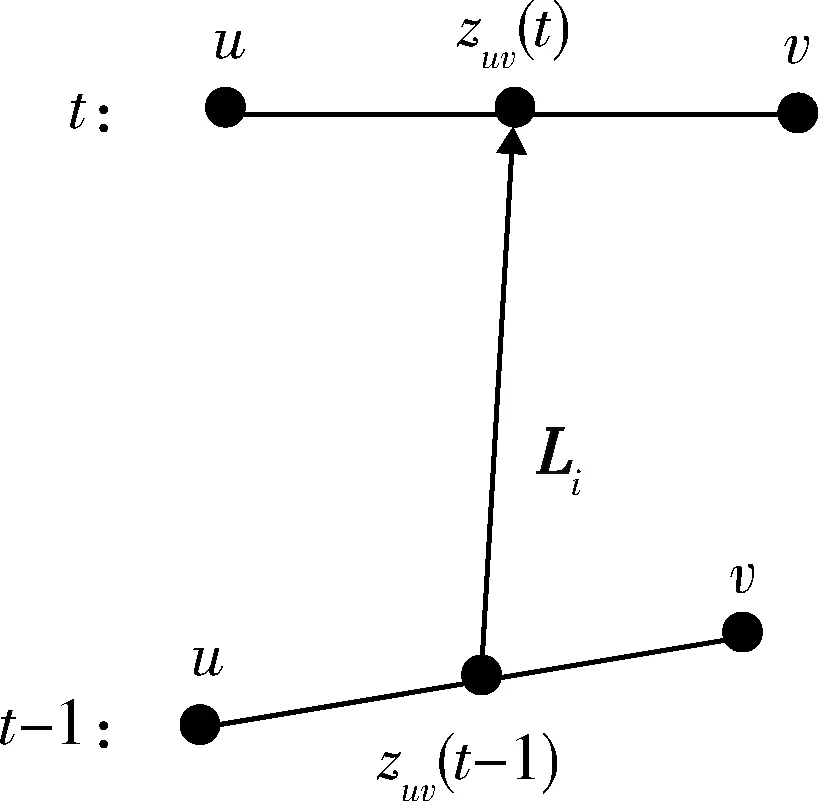
2.3 基于權(quán)重的中繼段向量連接方法





2.4 中繼航線規(guī)劃流程
3 仿真試驗與結(jié)果分析
3.1 功能試驗


3.2 性能試驗



4 結(jié)束語
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46中國石油石化(2021年9期)2021-07-17 09:24:00中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58公民與法治(2020年11期)2020-07-25 02:02:06河南水利年鑒(2020年0期)2020-06-09 05:43:30領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16商周刊(2017年5期)2017-08-22 03:35:26制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34中國衛(wèi)生(2016年2期)2016-11-12 13:22:16華東科技(2016年10期)2016-11-11 06:17:41