改進(jìn)粒子濾波的全捷聯(lián)導(dǎo)引頭制導(dǎo)信息估計(jì)*
2018-03-16 03:43:08龐威謝曉方劉家祺孫濤
現(xiàn)代防御技術(shù) 2018年1期
關(guān)鍵詞:方法
龐威,謝曉方,劉家祺,孫濤
(海軍航空工程學(xué)院 兵器科學(xué)與技術(shù)系,山東 煙臺(tái) 264001)
0 引言
新型滑翔制導(dǎo)炸彈是在普通航彈上加裝被動(dòng)式紅外圖像導(dǎo)引頭,實(shí)現(xiàn)防區(qū)外投放和打擊目標(biāo)的。而導(dǎo)引頭分為框架式導(dǎo)引頭和全捷聯(lián)導(dǎo)引頭:傳統(tǒng)框架式紅外圖像導(dǎo)引頭具有較大的視場(chǎng)角,且能夠直接提取比例制導(dǎo)等所需的視線角速率信息,但由于框架的存在,結(jié)構(gòu)復(fù)雜,成本較高,可靠性較低。隨著非制冷紅外探測(cè)器、CCD探測(cè)器等為代表的紅外圖像制導(dǎo)系統(tǒng)具有結(jié)構(gòu)簡單、成本低、設(shè)計(jì)方便等優(yōu)點(diǎn),其在精確制導(dǎo)系統(tǒng)中應(yīng)用成為目前研究的熱點(diǎn)。全捷聯(lián)紅外圖像導(dǎo)引頭是將光學(xué)系統(tǒng)、相機(jī)和圖像處理模塊等直接固聯(lián)在制導(dǎo)彈藥基座上,降低了復(fù)雜度和成本,提高了系統(tǒng)的可靠性;采用高分辨率的成像器件提高了角度分辨率以彌補(bǔ)無框架時(shí)視場(chǎng)角的降低;但無法直接測(cè)量制導(dǎo)所需的視線角速率信息,且由于視場(chǎng)角較大會(huì)引入較大的測(cè)量噪聲,因此需要設(shè)計(jì)合理的算法對(duì)其進(jìn)行解耦和信息估計(jì)。
相關(guān)文獻(xiàn)已開展了全捷聯(lián)式圖像導(dǎo)引頭視線角速率解耦和制導(dǎo)信息估計(jì)的研究。Maley James[1]和Jacques Waldman[2]分別采用卡爾曼濾波和擴(kuò)展卡爾曼濾波(extended Kalman filter, EKF)方法研究了視線角速度估計(jì)問題;Smita Sadhu[3]采用擾動(dòng)觀測(cè)器研究了視線角速度估計(jì)問題;曹衛(wèi)衛(wèi)[4]通過構(gòu)建基于FPGA的硬件卡爾曼濾波系統(tǒng)實(shí)現(xiàn)對(duì)彈體視線角速度的求導(dǎo)計(jì)算;袁亦方[5]提出了一種采用EKF濾波估計(jì)方法,用以解決單兵全捷聯(lián)圖像導(dǎo)引頭體視線角速度估計(jì)問題;孫婷婷[6]通過建立全捷聯(lián)導(dǎo)引頭的數(shù)學(xué)模型,分別采用微分+穩(wěn)態(tài)卡爾曼濾波方法和無跡卡爾曼濾波方法估計(jì)體視線角速度;王小剛[7]采用Huber-Based魯棒濾波研究了大氣層外飛行器捷聯(lián)導(dǎo)引頭體視線角估計(jì)問題;張韜[8]提出了一種基于無跡施密特卡爾曼濾波方法,并對(duì)落角約束導(dǎo)引律下對(duì)機(jī)動(dòng)目標(biāo)進(jìn)行了仿真。上述是基于觀測(cè)噪聲為高斯白噪聲條件下的視線角速度估計(jì)問題,實(shí)際上由于導(dǎo)引頭和炸彈制作工藝、導(dǎo)引頭安裝誤差、以及大的視場(chǎng)角導(dǎo)致體大量觀測(cè)噪聲等問題,并使其呈現(xiàn)非高斯特性從而導(dǎo)致視線角速度估計(jì)精度的降低。
針對(duì)上述問題,本文以滑翔制導(dǎo)炸彈中全捷聯(lián)導(dǎo)引頭的應(yīng)用為研究對(duì)象,通過推導(dǎo)視線角速度解耦公式,建立了視線角和角速度的狀態(tài)模型和觀測(cè)模型,然后利用改進(jìn)的粒子濾波算法估計(jì)視線角速度,并進(jìn)行了半實(shí)物仿真實(shí)驗(yàn)。
1 相關(guān)坐標(biāo)系和角度的定義
1.1 坐標(biāo)系的定義
為方便提取視線角速率,首先定義本文所需的坐標(biāo)系。
(1) 地面標(biāo)系Oxyz
與地表固連,取炸彈投放點(diǎn)在地面的投影點(diǎn)為坐標(biāo)原點(diǎn)O;彈道面與地面水平面的交線為Ox軸,正方向指向目標(biāo);Oy軸沿當(dāng)?shù)卮咕€指向天頂;Oz軸根據(jù)右手法則定義。
(2) 彈體坐標(biāo)系Oxdydzd
與彈體固連,取炸彈質(zhì)心為坐標(biāo)原點(diǎn)O;炸彈縱軸為Oxd軸,正方向指向炸彈頭部;Oyd軸位于炸彈縱向?qū)ΨQ剖面內(nèi),指向上為正;Ozd根據(jù)右手法則確定。
(3) 視線坐標(biāo)系Oxsyszs
取炸彈質(zhì)心為坐標(biāo)原點(diǎn)O;Oxs軸為炸彈和目標(biāo)的連線,正方向指向目標(biāo);Ozs軸位于地面坐標(biāo)系中Oxz面內(nèi),與Oxs軸垂直;Oys軸根據(jù)右手法則確定。
(4) 體視線坐標(biāo)系Oxtytzt
取炸彈質(zhì)心為坐標(biāo)原點(diǎn)O;Oxt軸為炸彈與目標(biāo)的連線,正方向指向目標(biāo);Ozt軸位于彈體坐標(biāo)系中Oxdzd面內(nèi),與Oxt軸垂直;Oyt根據(jù)右手法則確定。
1.2 角度的定義
qγ為視線高低角:表示視線坐標(biāo)系中Oxs與地面坐標(biāo)系中Oxz面之間的夾角。

qα為體視線高低角:表示體視線坐標(biāo)系Oxt軸與彈體坐標(biāo)系Oxdzd面之間的夾角。

qst為視線變換角:表示視線坐標(biāo)系Oys軸到體視線坐標(biāo)系Oyt軸之間的變換角。
?,ψ,γ分別為俯仰角、偏航角與滾轉(zhuǎn)角,其定義參見文獻(xiàn)[9]。
各坐標(biāo)系之間的轉(zhuǎn)換關(guān)系如圖1所示。其中L(*)表示轉(zhuǎn)換矩陣。

圖1 坐標(biāo)系之間的轉(zhuǎn)換關(guān)系Fig.1 Transformation between coordinate systems
2 視線角速度提取
2.1 視線角和角速度解耦方法
滑翔制導(dǎo)炸彈在末制導(dǎo)過程中,彈目相對(duì)地面坐標(biāo)系始終是運(yùn)動(dòng)的,全捷聯(lián)紅外圖像導(dǎo)引頭只能夠測(cè)量出體視線角的大小,其含有視線角和彈體姿態(tài)角,而比例導(dǎo)引方式所需的是視線坐標(biāo)系下的視線高低角和方位角以及視線高低角速度和方位角速度,因此需要將導(dǎo)引頭測(cè)量信號(hào)中耦合的彈目運(yùn)動(dòng)信息去除。
設(shè)向量ωd為彈體坐標(biāo)系相對(duì)于地面坐標(biāo)系3個(gè)方向上的旋轉(zhuǎn)角速度,則其在彈體坐標(biāo)系中可表示為
ωd=(ωx,ωy,ωz)T.
(1)
設(shè)向量ωst表示視線坐標(biāo)系相對(duì)于體視線坐標(biāo)系3個(gè)方向上的旋轉(zhuǎn)角速度,則其在視線坐標(biāo)系中可表示為
(2)
設(shè)向量ωtd表示體視線坐標(biāo)系相對(duì)于彈體坐標(biāo)系3個(gè)方向上的旋轉(zhuǎn)角速度,其在彈體坐標(biāo)系下可表示為
(3)
設(shè)向量ωse表示視線坐標(biāo)系相對(duì)地面坐標(biāo)系3個(gè)方向上的旋轉(zhuǎn)角速度,則其在地面坐標(biāo)系下可表示為
ωse=L(γ,?,ψ)(ωd+ωtd)+L(qγ,qλ)ωst.
(4)
此外,根據(jù)視線坐標(biāo)系和地面坐標(biāo)系之間的轉(zhuǎn)換關(guān)系,ωse也可表示為
(5)
根據(jù)式(4)和式(5)可得
(6)
式中:





設(shè)彈目距離在某時(shí)刻為R,由彈目相對(duì)運(yùn)動(dòng)關(guān)系和前文定義的坐標(biāo)系可知目標(biāo)在體視線坐標(biāo)系和視線坐標(biāo)系上的坐標(biāo)均為(R,0,0)T,根據(jù)圖1可得目標(biāo)在地面坐標(biāo)系和彈體坐標(biāo)系中的坐標(biāo)分別為
(7)
(8)
同時(shí),又根據(jù)地面坐標(biāo)系和彈體坐標(biāo)系的轉(zhuǎn)換關(guān)系,可得式(9)。
(9)
化簡,得
式中:
M= -cos ?sinψcosqαcosqβ+
(sin ?sinψcosγ+cosψsinγ)sinqα-
(-sin ?sinψsinγ+cosψcosγ)·
cosqαsinqβ;
N= cos ?sinψcosqαcosqβ+
(-sin ?cosψcosγ+sinψsinγ)sinqα-
(sin ?cosψsinγ+sinψcosγ)·
cosqαsinqβ.
至此,已推導(dǎo)出視線角高低角和視線角方位角度求解公式。
2.2 視線角速度估計(jì)模型
全捷聯(lián)紅外圖像導(dǎo)引頭測(cè)量的信息既包含體視線高低角qα和體視線方位角qβ,又包含大量的非高斯噪聲[10];而制導(dǎo)信息為視線高低角、視線方位角和視線高低速度、視線方位角速度,因此本文以這4個(gè)量為狀態(tài)變量建立系統(tǒng)的狀態(tài)方程。

圖2 彈目運(yùn)動(dòng)關(guān)系Fig.2 Relationship between missile and target

(11)
觀測(cè)方程為
(12)
式中:
v1和v2為觀測(cè)噪聲。由于全捷紅外圖像導(dǎo)引頭相對(duì)于普通導(dǎo)引頭具有更大的視場(chǎng),因此也導(dǎo)致其觀測(cè)噪聲的增大,尤其是非高斯噪聲的增大,嚴(yán)重影響了EKF方法的估算精度和穩(wěn)定特性;同時(shí),從式(11)和(12)中也可看出狀態(tài)方程和觀測(cè)方程具有較強(qiáng)的非線性,而粒子濾波對(duì)非線性系統(tǒng)、非高斯噪聲具有較高的估計(jì)精度,因此本文采用粒子濾波求解體視線角速度。
3 基于改進(jìn)粒子濾波的視線角速率求解
與EKF方法不同,粒子濾波是一種以蒙特卡羅仿真和遞推貝葉斯估計(jì)為基礎(chǔ)的統(tǒng)計(jì)濾波方法[12]。其主要思想是首先在狀態(tài)空間中產(chǎn)生一組以系統(tǒng)狀態(tài)向量的經(jīng)驗(yàn)條件分布為依據(jù)的粒子集合,并設(shè)定粒子的初始權(quán)重;然后根據(jù)系統(tǒng)的觀測(cè)值不斷調(diào)整集合中粒子的權(quán)重和位置用以修正初始設(shè)定的經(jīng)驗(yàn)條件分布。其本質(zhì)是用由粒子集合和對(duì)應(yīng)權(quán)重來組成離散隨機(jī)測(cè)度,用以近似系統(tǒng)狀態(tài)的相關(guān)概率分布,然后通過遞推算法來更新下一步的離散隨機(jī)測(cè)度。當(dāng)集合中的粒子數(shù)量很大時(shí),這種蒙特卡羅描述即可近似地表示系統(tǒng)狀態(tài)變量真實(shí)的后驗(yàn)概率密度函數(shù)。
3.1 標(biāo)準(zhǔn)粒子濾波算法

(13)

式(13)中權(quán)值可通過重采樣法選擇,可表示為
(14)

(15)
將式(15)帶入到式(14)中,可求得重要權(quán)值為
(16)
將權(quán)值歸一化,即
(17)
式(13)~(17)表示基本粒子濾波中權(quán)重的求解方法。采用式(16)求解的粒子權(quán)重可能會(huì)隨著時(shí)間的增加,導(dǎo)致重要性權(quán)值集中在少數(shù)粒子,僅靠這些粒子已經(jīng)不能夠有效地表達(dá)出后驗(yàn)概率密度函數(shù),即產(chǎn)生匱乏現(xiàn)象。為克服粒子匱乏,本文提出一種分層采用的粒子濾波算法。
3.2 基于分層采樣的粒子濾波算法
分層采樣中,將采樣空間劃分為多個(gè)部分,每個(gè)部分稱為層。在蒙特卡羅積分應(yīng)用中,把一個(gè)積分空間分成幾個(gè)子空間,然后分別計(jì)算每個(gè)子空間的積分值。因此,相對(duì)于隨機(jī)采樣,分層采樣可有效的減少采樣誤差。
考慮到函數(shù)P(x)具有如下的形式:
(18)

(19)
根據(jù)比例分配原則,每層采樣的粒子個(gè)數(shù)為
Ni=floor(Nγi).
(20)
由此,后驗(yàn)概率可近似地表示為
(21)
綜上所述,當(dāng)N→∞時(shí),可由大數(shù)定理保證式(21)的值逼近于真實(shí)后驗(yàn)概率。
3.3 改進(jìn)粒子濾波算法步驟
由3.2節(jié),將改進(jìn)的粒子濾波流程總結(jié)如圖3所示。
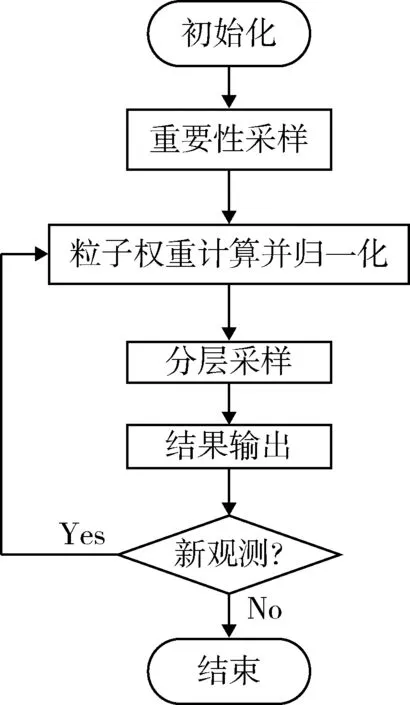
圖3 改進(jìn)粒子濾波算法流程圖Fig.3 Flow chart of improved particle filter algorithm
在本文中采用改進(jìn)粒子濾波的步驟如下:
Step 1:初始化。
Step 2:重要性采樣。
在k時(shí)刻,采用式(22)更新粒子權(quán)值:
i=1,2,…,N,
(22)
其中:h(·)為測(cè)量方程,即式(12);并采用式(23)對(duì)權(quán)值歸一化:
(23)
那么可得k時(shí)刻未知參數(shù)x的最小均方誤差估計(jì)為
(24)
Step 3:分層采樣。
選取重要性函數(shù)為P(X(k)|X(k-1)),并根據(jù)式(11)進(jìn)行一步預(yù)測(cè)得到新的粒子集合:
根據(jù)分層采樣理論,構(gòu)造出不同層次之間的高斯混合概率密度函數(shù)為
(25)
并由此重新獲得粒子集合
Step 4:輸出結(jié)果:k=k+1,轉(zhuǎn)入Step 2。
4 半實(shí)物仿真實(shí)驗(yàn)與分析
4.1 角速度估計(jì)半實(shí)物仿真實(shí)驗(yàn)

4.2 仿真設(shè)置
某新型滑翔制導(dǎo)炸彈采用三維比例制導(dǎo)方式打擊目標(biāo)[14],末制導(dǎo)啟控點(diǎn)坐標(biāo)為(0,2 000,0)m;初始速度vm0=(100,10,10) m/s,此刻俯仰高低角?m0=5.68°;初始航向角ψm0=5.71°,3個(gè)方向的初始加速度均為0。目標(biāo)初始位置為:(400,0,600)m,初始航向角為ψt0=0°,目標(biāo)作蛇形機(jī)動(dòng),其運(yùn)動(dòng)規(guī)律如式(26)所示。

圖4 半實(shí)物仿真硬件圖Fig.4 Hardware of the semi-physical simulation
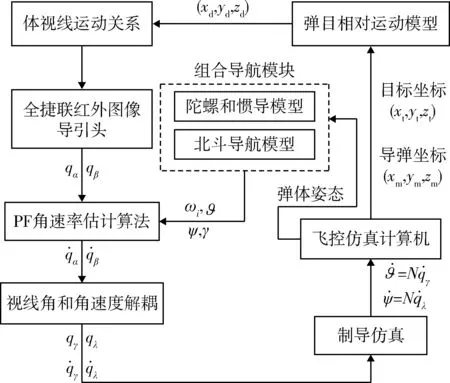
圖5 半實(shí)物仿真實(shí)驗(yàn)原理圖Fig.5 Schematic diagram of semi-physical simulation
(26)
設(shè)定本文的采樣時(shí)間dt=0.01 s,粒子個(gè)數(shù)為1 000。為驗(yàn)證本文方法的有效性,同時(shí)采用EKF算法[5]、標(biāo)準(zhǔn)粒子濾波方法(particle filter,PF)與理想無干擾理論計(jì)算比例導(dǎo)引律作為真值進(jìn)行對(duì)比[15];攻擊目標(biāo)過程中,末制導(dǎo)方式為比例導(dǎo)引律,其仿真結(jié)果如圖6~8所示。
定義角度和角速度的均方誤差作為算法的評(píng)價(jià)指標(biāo),即
(27)

4.3 仿真分析

圖7表示采用改進(jìn)粒子濾波得到的視線角和視線角速度的估計(jì)值和真值的對(duì)比結(jié)果。圖8表示分
別采用EKF濾波方法和標(biāo)準(zhǔn)粒子濾波(圖中PF線)以及本文改進(jìn)的粒子濾波(圖中IPF線)方法得到的濾波誤差,表1和表2分別表示采用3種方法得到最大估計(jì)誤差和均方誤差。從表中可以看出,采用改進(jìn)粒子濾波方法估計(jì)精度高于EKF和PF方法。
4.4 原因分析
采用改進(jìn)粒子濾波方法的估計(jì)精度高于EKF和PF方法,主要原因是由于導(dǎo)引頭測(cè)量的噪聲并非高斯白噪聲,同時(shí)由于組合導(dǎo)航模塊中陀螺和慣導(dǎo)測(cè)量誤差以及三軸轉(zhuǎn)臺(tái)控制精度等影響,導(dǎo)致觀測(cè)方程中測(cè)量噪聲含有大量非高斯噪聲;同時(shí)由于EKF濾波方法中的狀態(tài)轉(zhuǎn)移矩陣和觀測(cè)矩陣采用一階Taylor展開近似,忽略了二階以上的高階項(xiàng),因此不可避免地引入了線性化誤差,從而造成精度的下降。在PF方法中,由于粒子在迭代中發(fā)生匱乏現(xiàn)象,造成濾波精度低于改進(jìn)的粒子濾波方法。
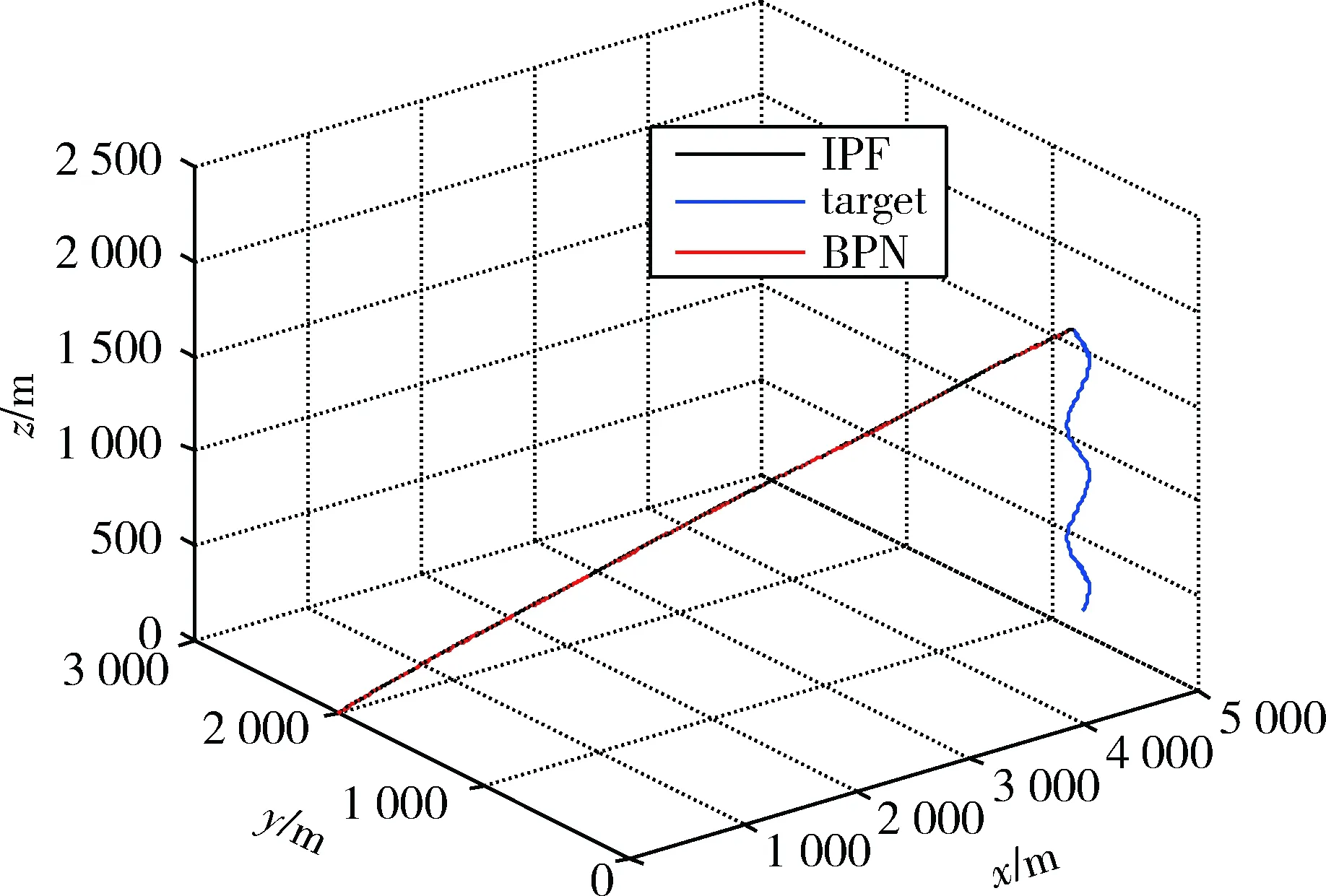
圖6 攻擊彈道Fig.6 Attack trajectory
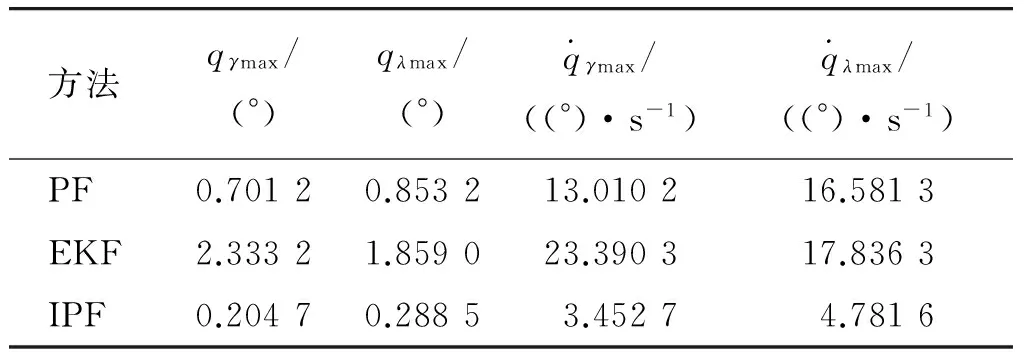
方法qγmax/(°)qλmax/(°qγmax/((°)·s-1qλmax/((°)·s-1)PF0.70120.853213.010216.5813EKF2.33321.859023.390317.8363IPF0.20470.28853.45274.7816
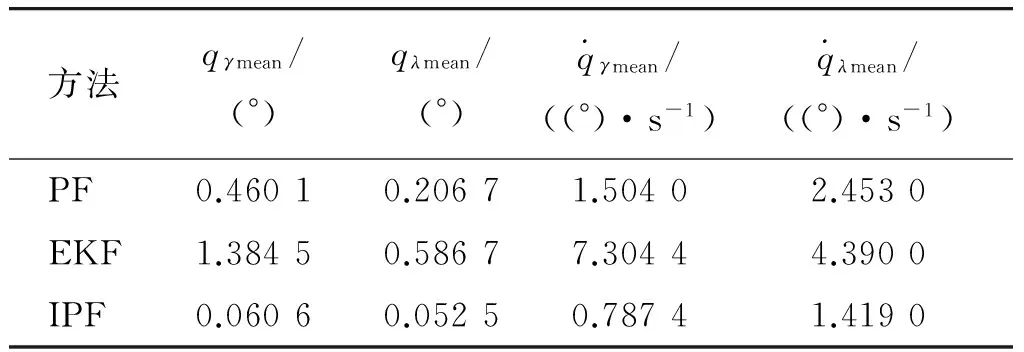
表2 均方誤差對(duì)比
圖7 視線角度和角速度估計(jì)Fig.7 Estimation LOS and velocity of LOS
圖8 誤差分析Fig.8 Error analysis
5 結(jié)束語
為加快推進(jìn)全捷聯(lián)紅外圖像導(dǎo)引頭在新型滑翔制導(dǎo)炸彈中的應(yīng)用,本文推導(dǎo)出了視線角和角速度的解耦公式,并提出了基于改進(jìn)粒子濾波的體視線角速度估計(jì)方法,設(shè)計(jì)了半實(shí)物仿真實(shí)驗(yàn)進(jìn)行驗(yàn)證,主要結(jié)論如下:
(1) 相比于EKF和PF方法,采用基于改進(jìn)粒子濾波的體視線角速度估計(jì)方法能夠得到較高精度的彈目視線角和角速度信息,能滿足滑翔制導(dǎo)炸彈對(duì)海/地平面攻擊所需比例導(dǎo)引律視線角速度的要求。
(2) 半實(shí)物仿真實(shí)驗(yàn)結(jié)果表明:基于改進(jìn)粒子濾波方法的全捷聯(lián)紅外圖像末制導(dǎo)導(dǎo)引頭制導(dǎo)信息精度較高,具有較強(qiáng)的實(shí)用價(jià)值,可為新型滑翔紅外圖像制導(dǎo)炸彈的研制提供一定的參考。
[1] MALEY J M.Line of Sight Rate Estimation for Guided Projectiles with Strapdown Seekers[J].AIAA Guidance,Navigation and Control Conference,2015,32(6):2346-2351.
[2] JACQUES W.Line-of-Sight Rate Estimation and Linearizing Control of an Imaging Seeker in a Tactical Missile Guided by Proportional Navigation[J].IEEE Transactions on Control Systems Technology,2002,10(4):556-567.
[3] SMITA S,GHOSHAL T K.Sight Line Rate Estimaion in Missile Seeker Using Disturbance Observer-Based Technique[J].IEEE Transactions on Control Systems Tehcnology,2011,19(2):449-454.
[4] 曹衛(wèi)衛(wèi).捷聯(lián)導(dǎo)引頭視線角速率估計(jì)方法研究[D].南京:南京理工大學(xué),2012. CAO Wei-wei,Study on Estimation Method of Los Rate of Strapdown Seeker[D].Nanjing:Nanjing University of Science and Technology,2012.
[5] 袁亦方,林德福,祁載康,等.單兵全捷聯(lián)圖像制導(dǎo)彈藥制導(dǎo)信息估計(jì)技術(shù)[J].紅外與激光工程,2015,44(1):370-376. YUAN Yi-fang,LIN De-fu,QI Zai-kang,et al.Techniques on Estimating Guidance Information for Strapdown Image Guided Man Portable Munitions[J].Infrared and Laser Engineering,2015,44(1):370-376.
[6] 孫婷婷,儲(chǔ)海榮,賈宏光,等.捷聯(lián)式光學(xué)導(dǎo)引頭視線角速率解耦與估計(jì)[J].紅外與激光工程,2014,43(5):1587-1593. SUN Ting-ting,CHU Hai-rong,JIA Hong-guang,et al.Line-of-Sight Angular Rate Decoupling and Estimationof Strapdown Optical Seeker[J].Infrared and Laser Engineering,2014,43(5):1587-1593.
[7] 王小剛,胡智勇,于洋,等.基于魯棒濾波的捷聯(lián)導(dǎo)引頭視線角速度估計(jì)方法[J].中國慣性技術(shù)學(xué)報(bào),2016,24(2):251-256. WANG Xiao-gang,HU Zhi-yong,YU Yang,et al.Line-of-Sight Angular-Rate Estimation of Strapdown Seeker Based on Robust Filter[J].Journal of Chinese Inertial Technology,2016,24(2):251-256.
[8] 張韜,張希銘,王民鋼.全捷聯(lián)導(dǎo)引頭制導(dǎo)信息濾波算法及仿真[J].西北工業(yè)大學(xué)學(xué)報(bào),2015,33(5):744-749. ZHANG Tao,ZHANG Xi-ming,WANG Min-gang.Algorithm and Simulation for Guidance Information Filter for Strapdown Seekers[J].Journal of Northwestern Polytechnical University,2015,33 (5) :744-749.
[9] 李新國,方群.有翼導(dǎo)彈飛行動(dòng)力學(xué)[M].西安: 西北工業(yè)大學(xué)出版社,2005:28-36. LI Xin-guo,FANG Qun.Winged Missile Flight Dynamics[M].Xi′an: Northwestern Polytechnical University Press,2005:28-36.
[10] 魯天宇,尹健,夏群利,等.基于波束角誤差補(bǔ)償?shù)南嗫仃噷?dǎo)引頭解耦算法[J].系統(tǒng)工程與電子技術(shù),2015,37(9):2123-2128. LU Tian-yu,YIN Jian,XIA Qun-li,et al.A Kind of Decoupling Algorithm of Phased Array Seeker Based on Beam Angle Error Compensation[J].Systems Engineering and Electronics,2015,37(9):2123-2128.
[11] ZHANG Guo-jiang,YAO Yu,MA Ke-mao.Line of Sight Rate Estimation of Strapdown Imaging Guidance System Based on Unscented Kalman Filter[C]∥Proceedings of Fourth International Conference on Machine Learning and Cybernetics,Guangzhou 2005:1574 -1578.
[12] 朱志宇.粒子濾波算法及其應(yīng)用[M].北京: 科學(xué)出版社,2010:27-35. ZHU Zhi-yu.Particle Filter and Its Application[M].Beijing: Science Press,2010:27-35.
[13] 李偉,曹潔,李軍,等.噪聲相關(guān)粒子濾波算法[J].電子科技大學(xué)學(xué)報(bào),2016,45(3):436-441. LI Wei,CAO Jie,LI Jun,et al.Particle Filter Algorithm with Correlative Noises[J].Journal of University of Electronic Science and Technology of China,2016,45(3):436-441.
[14] 袁宴波,張科,薛曉東.基于Radau偽譜法的制導(dǎo)炸彈最優(yōu)滑翔彈道研究[J].兵工學(xué)報(bào),2014,35(8):1179-1186.
YUAN Yan-bo,ZHANG Ke,XUE Xiao-dong.Optimization of Glide Trajectory of Guided Bombs Using a Radau Pseudo-spectral Method[J].Acta Armamentarii,2014,35(8):1179-1186.
[15] 歐陽中輝,劉家祺,張龍杰,等.基于矢量運(yùn)算的三維真比例導(dǎo)引彈道仿真[J].彈箭與制導(dǎo)學(xué)報(bào),2013,31(1):53-56. OUYANG Zhong-hui,LIU Jia-qi,ZHANG Long-jie,et al.Simulation of Three-Dimensional TPN Trajectory Based on Vector Operation[J].Journal of Projectiles,Rockets,Missiles and Guidance,2013,31(1):53-56.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56