電力電纜隧道自動巡檢機器人設計
2018-03-06 12:46:40
城市建設理論研究(電子版) 2018年26期
國網遼寧省電力有限公司大連供電公司 遼寧 大連 116000
正文:
1.自動巡檢機器人系統設計
根據電纜隧道現場情況以及電力電纜運維規程的要求,本設計對自動巡檢機器人的巡檢功能、檢測功能、通訊功能、機械結構進行了設計。
1.1 巡檢功能
自動巡檢機器人需要對隧道內的電纜運行情況、隧道主體狀況以及隧道內環境進行綜合巡視,系統具備自主巡檢、遠程遙控、上位機操控3種工作模式。其中自主巡檢功能主要通過激光測距傳感器、最小二乘法擬合直線算法來實現[1],機器人可實現沿步道自主前進,實現運動中避障、避積水坑等功能。
1.2 檢測功能
本設計根據國網公司對高壓電力電纜隧道環境監測的基本要求,配備了氧氣、CO2、CO、可燃、有毒等氣體濃度、溫濕度等傳感器,用于監測隧道內環境數據,并通過無線通訊方式將數據發至上位機[2]。為實現遠程遙控、上位機操控模式要求,機器人配備了紅外攝像頭,可通過WiFi實時將視頻信號上傳,方便操作人員觀察電纜及隧道運行情況。
1.3 通訊功能
通訊系統中,上位機下達控制指令,經操作端網橋將信號轉為無線信號,以2.4GHz 頻率的WiFi通信的發送至機器人端網橋,機器人端網橋將無線信號轉為有線信號,發送至中間箱體電路[3]。中間箱體電路將接收到的控制指令分配給頂部箱體電路、左側箱體電路、右側箱體電路。同時,中間箱體電路采集各傳感器、攝像頭信息發至機器人端網橋,通過無線發至操作端網橋,控制程序通過解析回傳的信息,將圖像以及傳感器信息顯示在上位機中。
1.4 機械結構設計
本設計的機械結構包括機器人的主要材料、外部尺寸、驅動形式、整體布置方案進行了設計,根據實際需求進行了防水、防火設計。
因機器人應有防水、防火的能力,故選取了6061號鋁合金為主體材料;根據電力隧道工井尺寸計算機器人長╳寬應小于600mm╳500mm;為提高機器人越障、通過復雜地形的能力,機器人的驅動形式為四輪驅動。
機器人需跨越防火門和應對泥濘路面,所以將輪胎設計成齒輪,防止輪胎打滑。機器人主體分為三個箱體,箱體之間通過螺栓連接。兩側箱體放置電動機及電池,中間箱體放置升降臺、攝像頭及傳感器,箱體間信號及電力的傳輸電纜連接。為便于將機器人放入隧道中,在兩側箱體的頂端各布置了兩個吊耳。為了增加機器人的通過能力,在兩側箱體的底面和靠近中間的位置進行了倒角處理。
加工前對全部機械零件以及防水橡膠墊進行了三維建模,并進行了虛擬裝配,虛擬裝配與實際組裝對比圖如圖1所示。對關鍵部件進行了有限元仿真,根據設計好的三維模型生成圖紙交付工廠進行加工、組裝。

圖1 虛擬裝配與實際組裝對比圖
2.仿真測試
為減少實地試驗,并驗證巡檢算法和結構的可行性,本設計對電纜隧道多種地形進行了三維建模。建模對象主要包括電纜隧道頂部、底部及左右兩側墻體、電纜支架、電力電纜、以及積水坑、磚石、臺階等。如圖2所示,即為建模后得到的電纜隧道局部圖,圖中物體均按照電纜隧道實測尺寸建模。
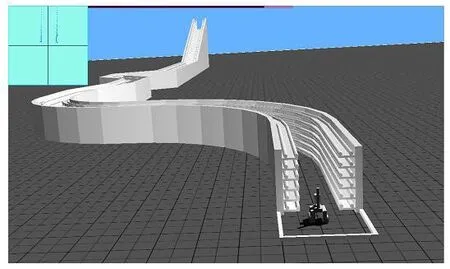
圖2 電纜隧道與機器人模型
將建好的模型導入Webots 機器人仿真軟件中,加入所需傳感器,將半自主巡檢算法移植到Webots 中,使用Webots 進行仿真以測試算法的可靠性。
仿真中,機器人可順利通過直線路段、轉彎路段以及折線路段,在理論上驗證了算法的可行性。本文設計的機器人進入電纜隧道現場進行調試與測試,即可完成半自動巡檢功能。
3.上位機設計
為了實現巡視電纜隧道內部情況,以及對機器人進行遠距離操控,需設計上位機軟件,該上位機軟件可實時顯示各氣體傳感器數據、機器人狀態、電池電量、通訊信號強度等信息。
上位機界面可觀察兩路視頻信號、監控溫度傳感器以及各個環境監測的數據,并根據設定好的環境參數閾值顯示正常或危險不宜進入電纜隧道。
上位機還具備查看主路由器、發射網橋、接收網橋、網轉串、導航攝像頭、巡檢攝像頭的IP地址、PING值、錯誤率、遠距離操控等信息的功能,用于判斷機器人運行狀態。
4.測試
依托電纜隧道實地對本設計進行了測試,包括防水、無線通訊距離、避障、最高速度、直線速度、爬坡能力、非連續臺階、極限長度深坑,以及連續運行時間等測試。測試結果表明,機器人各項指標均達到設計要求。
5.總結
根據測試,本設計滿足大連地區電纜隧道巡檢的需要,實現了從隧道外部控制隧道內機器人工作、通過自動巡檢算法進行自動巡檢、上位機遙控三種工作模式,為電力電纜巡檢提供了新的解決方案。
通過實際應用,該機器人同時也存在著如下改進空間:
1、重量大,可通過選用其他新型材料進行減重;
2、遠距離遙控時需加信號中繼裝置,可結合5G通訊技術發展尋求新的通訊解決方案;
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
