智能電磁擦黑板機器人的研制
2018-02-27 21:52:59李國基
中國教育技術裝備 2018年1期
李國基

摘 要 黑板是教師上課的主要教學工具,為高效、環保地擦除黑板上的字跡,保障教師和學生的身心健康,研制一種智能電磁擦黑板機器人,機器人包括本體、行走機構和擦除機構,以及與行走機構和擦除機構相連接的控制系統。整個過程由控制系統自動控制,可以高效地完成黑板的清潔工作,且無揚塵產生,利于環保。
關鍵詞 黑板;智能電磁擦黑板機器人;黑板擦;電動黑板擦;機器人
中圖分類號:TP242.6 文獻標識碼:B
文章編號:1671-489X(2018)01-0042-05
1 前言
智慧型機器人掃地機能夠在無人操控的情況下將地板擦得干干凈凈,通過觀察它的神奇效果,筆者想到可以設計一款類似的智能機器人,代替學生和教師去擦黑板,節省勞動力和上課時間,從而更好地提高教學效率。經過不斷努力,筆者研發出一種智能電磁擦黑板機器人,并獲得國家發明專利。
2 研究背景和目的
在學校,教師每上完一節課,學生都要輪流值日擦黑板。傳統的擦黑板方式就是用小小的黑板擦直接擦除,既費工、費時,也不利于身心健康。后來出現一種電動黑板擦[1],其底部安裝一支架,支架上裝有毛刷,黑板上下各設有一橫桿來固定支架,通過手動或電動驅動支架,使板擦在黑板上行走而達到擦除黑板字跡的目的[2]。此種方法的弊端就是毛刷與黑板的接觸面不夠緊密,字跡擦除不太干凈而且粉塵飛揚。為了解決這些問題,嘗試研制一種智能電磁擦黑板機器人。
3 研究內容及工作原理
1)積塵盒在電磁鐵的作用下發生高速振動,使毛刷面與黑板面發生快速摩擦,將粉筆痕跡擦除。
2)擦除下來的粉塵顆粒在風機的作用下,從微通道進至積塵盒的容腔內,并被過濾網攔截。
3)機器人在黑板面上做蛇形移動,并最終將整面黑板擦除干凈,收集下來的粉塵可以通過拆下積塵盒倒掉。
4)系統由控制系統自動控制,可以高效地完成黑板的清潔工作,且無揚塵產生,利于環保。
4 研究方法和結果
黑板準備 選擇整體鐵質底板的磁性黑板。
機器人機械系統
1)機器人本體吸附在黑板上,本體上設有行走機構和擦除機構,以及與行走機構和擦除機構連接的控制系統。
2)擦除機構包括安裝在本體上的積塵盒、與積塵盒相連接的容腔。
3)驅動積塵盒相對本體移動的動力裝置。
4)設置在本體上,與積塵盒容腔相連通的風道,風道內設有使容腔產生負壓的風機。
5)積塵盒的至少一面為毛刷面,且該毛刷面上設有貫通至容腔的微通道。
6)機器人的底部設有滑腔,積塵盒可滑動地安裝在滑腔內;容腔的一側為敞開口,并與風道相連通;在容腔的敞開口一側安裝有過濾網,過濾網至少將敞開口完全覆蓋。
7)動力裝置為電磁鐵,積塵盒的至少一側設有與電磁鐵配合的銜鐵,在電磁鐵與銜鐵之間還設有一彈簧。
8)滑腔的至少一側設有開口,積塵盒的一側設有穿過開口的U形架,銜鐵為平板狀,并固定在U形架上;電磁鐵通過一固定座安裝在本體上彈簧套在U形架上,其一端與固定座接觸,另一端與銜鐵接觸。
9)本體上的滑腔為兩個,并對稱設置;擦除機構為兩
個,并與滑腔對應設置。
10)滑腔的兩端還設有永磁鐵,永磁鐵固定連接在滑腔壁上并對稱分布。
11)本體的中心設有一圓筒形風機固定座,風機設置在風機固定座內;風道的一端與滑腔連接,另一端與風機固定座連接;滑腔與風道的連接處設有貫通滑腔壁的進風口;風機固定座的上部為敞開口,為出風口。
12)微通道為多個均勻分布的貫穿容腔壁的小孔,毛刷面上設有刷毛。
機器人控制系統 控制系統包括微處理器、與微處理器連接的電機驅動芯片、傳感器、電源裝置。
機器人行走系統 行走系統包括:設置在本體兩側的行走輪;與行走輪連接的驅動電機;微處理器通過電機驅動芯片與驅動電機連接;傳感器設置在本體邊緣,包括多個光電開關;電源裝置與擦除機構的動力裝置連接;本體的頂端設有一外殼,外殼的中心設有多個通風孔。
5 實施方案
擦黑板機器人效果圖(圖1、圖2)
擦黑板機器人具體實施方案 下面結合附圖對擦黑板機器人的具體實施方案做進一步詳細的描述。
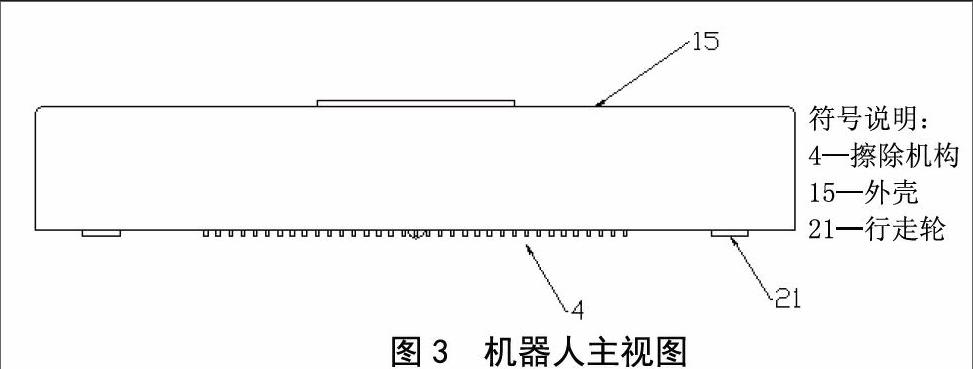
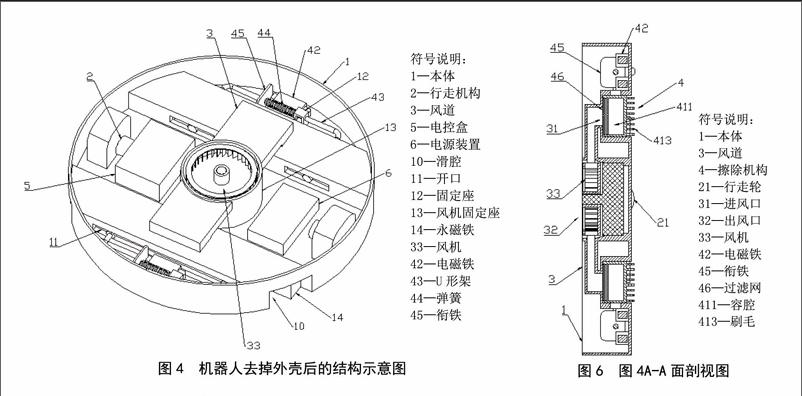
1)如圖3和圖4所示,擦黑板機器人包括:一個本體1,其上設有用于驅動本體1移動的行走機構2,用于清除黑板上粉筆痕跡的擦除機構4,以及與行走機構2和擦除機構4相連接的控制系統。
2)在本體1的底部固定安裝有多個永磁鐵14,永磁鐵14與黑板面產生吸附力,使本體1抓牢在黑板面上。在控制系統的控制下,行走機構2驅動本體1在黑板上做蛇形移動,并通過擦除機構4將黑板上的粉筆痕跡清理干凈。
3)結合圖3、圖4和圖5所示,驅動擦除機構4,將粉塵落在本體1底部的積塵盒41。
4)如圖6和圖7所示,驅動本體1的動力裝置,啟動風機33,粉塵經過風道3進入積塵盒41。
5)如圖4和圖5所示,本體1底部設有內凹的滑腔10,積塵盒41為方盒形,其兩側和頂部分別與滑腔10內壁相接觸,積塵盒41的底部設有毛刷面,并凸出于滑腔10以與黑板面接觸,積塵盒41可在動力裝置的驅動下在滑腔10內來回滑動,以與黑板面摩擦將粉筆痕跡清除。
6)如圖6和圖7所示,為了收集清除下的粉塵,積塵盒41的中間具有一容腔411,用于盛裝粉塵,容腔411的一側為敞開口,并與風道3相連通;在容腔411的敞開口一側還安裝有過濾網46,過濾網46至少將敞開口完全覆蓋,以防止粉塵從敞開口一側漏出;在積塵盒41的毛刷面上設有貫通至容腔411的微通道412,粉塵經毛刷面擦除后,在風機33產生的負壓作用下,粉塵顆粒通過微通道412進入容腔411內,并被過濾網46攔截留在所述容腔411內。endprint
7)如圖4、圖6和圖7所示,敞開口位于積塵盒41上側,敞開口的邊緣貼合在滑腔10內壁上。本體1的中心設有一圓筒形的風機固定座13,風機33設置在風機固定座13內;風道3的一端與滑腔10外壁連接,另一端與風機固定座13連接;滑腔10與風道3的連接處設有貫通滑腔壁的進風口31,進風口31與積塵盒41敞開口的位置相對應;風機固定座13與風道3相連通,風機固定座13的上部為敞開口;作為出風口32,風機33為離心風機,風機33旋轉時將風機固定座13和風道3內的空氣通過出風口32排出,進而使得積塵盒41的容腔411產生負壓環境,并通過微通道412將粉塵收集。
8)如圖6所示,微通道412為多個均勻分布的貫穿容腔壁的小孔,毛刷面上設有刷毛413,小孔的直徑控制在3~5 mm之間,以防止小孔被粉塵顆粒堵塞。
9)如圖6和圖7所示,過濾網46的大小與敞開口相配,可方便地安裝在積塵盒41上;當積塵盒41內的粉塵裝滿
時,可以拆掉過濾網46,將粉塵從敞開口倒掉,并安裝新的過濾網46。
10)如圖4、圖6和圖7所示,動力裝置為電磁鐵42,積塵盒41的至少一側設有與電磁鐵42配合的銜鐵45,在電磁鐵42與銜鐵45之間還設有一彈簧44。
11)如圖4和圖7所示,滑腔10至少一側設有開口11,積塵盒41的一側設有穿過開口11的U形架43;銜鐵45為平板狀,并固定在U形架43上;電磁鐵42通過一固定座12安裝在本體1上;彈簧44套在U形架43上,其一端與固定座12接觸,另一端與銜鐵45接觸。當電磁鐵42不通電時,在彈簧44彈力作用下,銜鐵45遠離電磁鐵42,即積塵盒41位于滑腔10的一端;當電磁鐵42通電時,銜鐵45在磁力作用下壓縮彈簧44并靠近電磁鐵42,帶動積塵盒41向滑腔10的另一端運動,產生相對黑板面的滑動摩擦;當電磁鐵42通入高頻脈沖電時,銜鐵45將不斷重復靠近和遠離電磁鐵42的動作,使積塵盒41發生高速振動,與黑板面產生快速摩擦,達到高效擦除黑板的目的。
12)如圖4和圖8所示,為提高擦除黑板的速度,本體1底部設有兩個內凹的滑腔10,兩滑腔10分布在本體1兩側且平行設置;擦除機構4為兩個,與滑腔10對應設置。
13)如圖4和圖5所示,永磁鐵14固定在滑腔10的兩端,永磁鐵14固定連接在滑腔10內壁上,并對稱分布。
14)如圖9所示,控制系統包括微處理器7、與微處理器7連接的電機驅動芯片8、傳感器9和電源裝置6。
15)如圖4、圖5、圖6、圖8和圖9所示,行走機構2包括:設置在本體1兩側的行走輪21,與行走輪21連接的驅動電機22;微處理器7安裝在本體1上的電控盒5內,并通過電機驅動芯片8與之連接;兩個驅動電機22分別由微處理器7單獨控制,并通過差速轉動實現轉彎動作;為使本體1保持平衡,在兩行走輪21之間還設有一萬向輪23,萬向輪23與兩行走輪21構成三點支撐,使本體1保持平衡;傳感器9設置在本體1的邊緣,包括多個光電開關,當本體1運動至黑板邊緣時,光電開關接收到的光信號將發生變化,微處理器7接收到該信號后將自動控制行走機構2轉彎掉頭;電源裝置6還與擦除機構4的動力裝置連接,為電磁鐵42供電。
16)如圖9所示,微處理器7可以選用單片機,并通過編程控制使本體1做蛇形移動;電機驅動芯片8可以選用L298N電機驅動芯片,電源裝置6為可充電電池。
17)如圖6和圖10所示,本體1的頂端設有一與之相配的外殼15,外殼15的中心設有多個通風孔16,風道3的出風口32與通風孔16相連通。
6 分析和討論
隨著當今機器人產業的飛速發展,社會各個領域越來越離不開智能化產品,同時,各種智能化設備在不斷地更新換代,傳統的設備逐步要退出歷史舞臺,隨之要被智能化的、網絡化的、先進的產品所替代。智能電磁擦黑板機器人的誕生,將是智能產品的杰出代表,對社會的進步將產生積極的促進作用。
智能電磁擦黑板機器人的研究得到教師和專家的精心指導,在此,筆者衷心地向教師和專家表示感謝,下一步還要與海爾的專家和研發團隊進一步合作,虛心向他們學習,對機器人做出進一步的改進。
智能電磁擦黑板機器人具有廣泛的市場前景,從目前幼兒園、小學、中學以及大學的教學使用量來看,就有無比廣闊的使用空間。傳統的教學工具必將隨著時代的發展而被新生的、先進的、智能化的、網絡化的新產品所取代,機器人時代的來臨必將帶來一場革命。
發明專利 基于智能電磁擦黑板機器人獨特的構思和巧妙的設計理念,筆者于2016年1月26日向國家知識產權局提交發明專利申請,經過層層嚴格審查,于2017年3月8日收到國家知識產權局下發的發明專利證書(專利號:ZL201610049809.2)。
發明創意 智能電磁擦黑板機器人有三點發明創意:
1)具有新穎性,首次采用電磁原理作為驅動動力,有效地擦除黑板板面;
2)具有創造性,首創完全無塵處理系統,實現教室環境的綠色環保;
3)具有實用性,徹底改變了傳統擦黑板的模式,且達到高效、干凈地擦除黑板的技術效果。
研究結論 智能電磁擦黑板機器人通過控制系統自動完成整面黑板的清潔工作,其擦除機構的毛刷以高頻振動的方式與黑板面發生摩擦,不僅工作效率高,擦除效果好,而且通過積塵盒自動收集粉塵,可以極大地減輕教師和學生的勞動負擔,減少室內污染,有利于師生的身體健康。
改進思路 此項技術是筆者的初步發明,下一階段有三點設想做進一步研究:
1)外觀設計美觀大方,增加美感;
2)尋求合作人實現產品轉化,服務于教學系統;
3)采用遙控器裝置,操作更加方便,有效地擦除黑板字跡。
參考文獻
[1]宋金鵬,郭超麗.自動擦黑板刷的設計[J].機電信息,2009(30):164-165.
[2]雷曉鈞,李金鐸.新型防塵黑板擦的研制[J].科技傳播,2013(6):92,74.endprint