基于驅(qū)動(dòng)譜修正迭代控制算法的三軸振動(dòng)控制研究
2018-02-27 11:04:04馬希彬陳章位趙玉剛欒強(qiáng)利
振動(dòng)與沖擊 2018年3期
馬希彬, 陳章位, 趙玉剛, 王 偉, 欒強(qiáng)利
(1.浙江大學(xué) 流體動(dòng)力與機(jī)電系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室,杭州 310027; 2.杭州億恒科技有限公司,杭州 310011)
振動(dòng)試驗(yàn)通過(guò)復(fù)現(xiàn)給定的功率譜或振動(dòng)波形再現(xiàn)真實(shí)的振動(dòng)環(huán)境,常用于考核設(shè)備在相應(yīng)振動(dòng)情況下的性能,廣泛應(yīng)用于航空航天、機(jī)械制造、車輛與船舶、橋梁與建筑等眾多工程測(cè)試和結(jié)構(gòu)減振領(lǐng)域。振動(dòng)試驗(yàn)系統(tǒng)從激振方向上分為單軸和多軸振動(dòng)試驗(yàn)系統(tǒng),從激勵(lì)數(shù)目上分為單點(diǎn)激勵(lì)和多點(diǎn)激勵(lì)振動(dòng)試驗(yàn)系統(tǒng)[1]。多軸多激勵(lì)振動(dòng)試驗(yàn)系統(tǒng)可提供更大的推力、實(shí)現(xiàn)應(yīng)力的非均勻分布、提高信號(hào)的信噪比、縮短試驗(yàn)時(shí)間、提高故障的發(fā)現(xiàn)率等。
Sloane等[2]提出了隨機(jī)功率譜密度估計(jì)均衡處理再現(xiàn)試驗(yàn)方法,推動(dòng)了多軸振動(dòng)試驗(yàn)控制的研究和發(fā)展;Smallwood[3]分析了單軸多激勵(lì)振動(dòng)實(shí)驗(yàn)系統(tǒng)隨機(jī)振動(dòng)控制驅(qū)動(dòng)信號(hào)閉環(huán)修正算法,解決了多輸入多輸出耦合控制問(wèn)題。本文基于已有成果,利用HV頻響函數(shù)估計(jì)法對(duì)三軸振動(dòng)實(shí)驗(yàn)系統(tǒng)進(jìn)行系統(tǒng)辨識(shí);針對(duì)辨識(shí)函數(shù)矩陣出現(xiàn)奇異值情況,設(shè)置閾值進(jìn)行奇異值截?cái)啾WC算法的穩(wěn)定性,并用迭代控制算法修正驅(qū)動(dòng)譜以提高振動(dòng)控制精度;最后用集成該算法的多輸入多輸出振動(dòng)控制器與三軸振動(dòng)臺(tái)進(jìn)行試驗(yàn)。實(shí)驗(yàn)結(jié)果表明,基于驅(qū)動(dòng)譜修正迭代控制算法對(duì)功率譜的復(fù)現(xiàn)具有較好的精度和工程實(shí)用性。
1 三軸振動(dòng)試驗(yàn)控制系統(tǒng)的辨識(shí)[4-5]
三軸振動(dòng)試驗(yàn)控制系統(tǒng)可以表述為多輸入多輸出系統(tǒng)模型,實(shí)際多輸入多輸出系統(tǒng)模型如圖1所示,系統(tǒng)有n個(gè)驅(qū)動(dòng)信號(hào),m個(gè)響應(yīng)信號(hào),每一個(gè)驅(qū)動(dòng)信號(hào)d(t)將對(duì)所有的控制信號(hào)c(t)產(chǎn)生作用,該系統(tǒng)的頻域數(shù)學(xué)模型可描述為
c(f)-n(f)=H(f)(d(f)-m(f))
(1)
式中:c(f)為m×1維響應(yīng)信號(hào);d(f)為n×1維輸入信號(hào);m(f)為n×1維輸入噪聲信號(hào);n(f)為m×1維輸出噪聲信號(hào);H(f)為m×n維系統(tǒng)的頻響函數(shù)。

圖1 多輸入多輸出系統(tǒng)模型
頻響函數(shù)估計(jì)實(shí)際上是一種有誤差的測(cè)試數(shù)據(jù)的估計(jì),其誤差一部分來(lái)自功率譜估計(jì)算法的固有誤差,一部分來(lái)自輸入輸出信號(hào)存在干擾而造成頻率函數(shù)估計(jì)誤差。針對(duì)不同的誤差情況,應(yīng)建立相應(yīng)的模型,確定誤差最小估計(jì)準(zhǔn)則,分析頻率響應(yīng)估計(jì)結(jié)果。
1.1 輸出噪聲估計(jì)模型——H1估計(jì)
一般認(rèn)為噪聲信號(hào)與輸入信號(hào)、輸出信號(hào)不相關(guān),當(dāng)假設(shè)系統(tǒng)輸入不存在噪聲,即m(f)=0,式(1)可寫成
c(f)=H(f)d(f)+n(f)
(2)
對(duì)式(1)兩端同時(shí)右乘d(f)*(“*”為共軛轉(zhuǎn)置),并求數(shù)學(xué)期望得
Gcd(f)=H(f)Gdd(f)+Gnd(f)
(3)
式中:Gcd(f)為系統(tǒng)輸入輸出之間的互功率譜;Gdd(f)為系統(tǒng)輸入的自功率譜;Gnd(f)為系統(tǒng)的輸出噪聲與輸入之間的互功率譜。
當(dāng)n(f)與d(f)不相關(guān)時(shí),即Gnd(f)=0,代入式(3)可得
Gcd(f)=H(f)Gdd(f)
(4)
若Gdd(f)可逆,則系統(tǒng)頻響函數(shù)估計(jì)式可簡(jiǎn)化為
H1(f)=Gcd(f)Gdd(f)-1
(5)
多輸入多輸出系統(tǒng)理論上(無(wú)噪聲)的頻響函數(shù)H0(f)表達(dá)式為
H0(f)=Gvu(f)Guu(f)-1=Gvv(f)Guv(f)-1
(6)
式中:Gvu(f)為系統(tǒng)真實(shí)輸出與真實(shí)輸入之間的互功率譜;Guu(f)為系統(tǒng)真實(shí)輸入的自功率譜;Gvv(f)為系統(tǒng)真實(shí)輸出的自功率譜;Guv(f)為系統(tǒng)真實(shí)輸入與真實(shí)輸出之間的互功率譜。
顯然有
Gdd(f)=E[d(f)d(f)*]=E[(u(f)+
m(f))(u(f)+m(f))*]=Guu(f)+Gum(f)+
Gmu(f)+Gmm(f)
(7)
Gcd(f)=E[c(f)d(f)*]=Gvu(f)+
Gvm(f)+Gnu(f)+Gnm(f)
(8)
由于噪聲信號(hào)與輸入信號(hào)、輸出信號(hào)不相關(guān),即Gum(f)=0,Gmu(f)=0,Gvm(f)=0,Gnu(f)=0,Gnm(f)=0。
式(5)可轉(zhuǎn)換為
H1(f)=Gvu(f)(Guu(f)+Gmm(f))-1=
(9)
由式(9)可以看出H1估計(jì)法是欠估計(jì),并且輸入噪聲對(duì)精度有很大影響。
1.2 輸入噪聲估計(jì)模型——H2估計(jì)
當(dāng)假設(shè)系統(tǒng)輸出不存在噪聲,即n(f)=0,式(1)可寫成
c(f)=H(f)(d(f)+m(f))
(10)
對(duì)式(10)兩端同時(shí)右乘c(f)*(“*”為共軛轉(zhuǎn)置),并求數(shù)學(xué)期望整理得
Gcc(f)=H(f)(Gdc(f)+Gmc(f))
(11)
式中:Gcc(f)為系統(tǒng)輸出的自功率譜;Gdc(f)為系統(tǒng)輸入輸出之間的互功率譜;Gmc(f)為系統(tǒng)的輸入噪聲與輸出之間的互功率譜。
當(dāng)m(f)與c(f)不相關(guān)時(shí),即Gmc(f)=0代入式(11)可得
Gcc(f)=H(f)Gdc(f)
(12)
若Gdc(f)可逆,則系統(tǒng)頻響函數(shù)估計(jì)式化簡(jiǎn)為
H2(f)=Gcc(f)Gdc(f)-1
(13)
Gcc(f)=E[c(f)c(f)*]=
E[(v(f)+n(f))(v(f)+n(f))*]=
Gvv(f)+Gvn(f)+Gnv(f)+Gnn(f)
(14)
Gdc(f)=E[d(f)c(f)*]=
Guv(f)+Gun(f)+Gmv(f)+Gmn(f)
(15)
由于噪聲信號(hào)與輸入信號(hào)、輸出信號(hào)不相關(guān),即Gnv(f)=0,Gvn(f)=0,Gun(f)=0,Gmv(f)=0,Gmn(f)=0。
式(13)可轉(zhuǎn)換為
H2(f)=(Gvv(f)+Gnn(f))Guv(f))-1=
(16)
由式(16)可以看出H2估計(jì)法是過(guò)估計(jì),并且輸出噪聲對(duì)精度有較大影響。
1.3 輸入輸出噪聲估計(jì)模型—HV估計(jì)[6-8]
為了綜合考慮系統(tǒng)輸入輸出噪聲,提高頻響估計(jì)精度,可根據(jù)最小二乘原理,極小化誤差矩陣的方法建立頻響函數(shù)估計(jì)HV模型。將系統(tǒng)頻域模型式移項(xiàng)變換為
c(f)-H(f)d(f)=n(f)-H(f)m(f)
(17)
將式(17)兩端同乘各自的共軛轉(zhuǎn)置得
(c(f)-H(f)d(f))(c(f)-H(f)d(f))*=
(n(f)-H(f)m(f))(n(f)-H(f)m(f))*
(18)
對(duì)式(18)兩端求數(shù)學(xué)期望,整理得
(19)
對(duì)于H1估計(jì)法和H2估計(jì)法來(lái)說(shuō),都需要進(jìn)行矩陣求逆運(yùn)算,實(shí)際測(cè)量信號(hào)都存在誤差,且Gdd(f),Gdc(f)矩陣不一定可逆,這些因素導(dǎo)致矩陣病態(tài),矩陣求逆時(shí)產(chǎn)生很大誤差,從而增大頻響函數(shù)估計(jì)誤差。對(duì)于系統(tǒng)共振頻率附近點(diǎn),系統(tǒng)的輸入信號(hào)信噪比較低,輸出信號(hào)信噪比較高,因此在共振點(diǎn)附近H2估計(jì)比H1估計(jì)的精度高,反共振點(diǎn)附近,由于信噪比情況相反,所以H1估計(jì)比H2估計(jì)精度高。HV估計(jì)法綜合考慮了系統(tǒng)輸入輸出噪聲,在估計(jì)過(guò)程中對(duì)每個(gè)頻率點(diǎn)上的輸入輸出互譜矩陣進(jìn)行特征值分解,避免了矩陣求逆運(yùn)算。故本文三軸振動(dòng)實(shí)驗(yàn)系統(tǒng)選用HV估計(jì)法進(jìn)行系統(tǒng)頻響函數(shù)的辨識(shí)。
2 三軸振動(dòng)試驗(yàn)系統(tǒng)解耦研究
本小節(jié)將對(duì)控制系統(tǒng)展開研究,使三軸振動(dòng)的響應(yīng)與設(shè)定的參考譜的誤差保持在一定范圍內(nèi),辨識(shí)控制過(guò)程如圖2所示。

圖2 系統(tǒng)辨識(shí)過(guò)程
Fig.2 System identification process
從理論上來(lái)講,為使響應(yīng)譜和參考譜一致,需要引入一個(gè)控制矩陣(解耦補(bǔ)償矩陣Z(ω))對(duì)系統(tǒng)進(jìn)行補(bǔ)償。解耦補(bǔ)償矩陣本質(zhì)上就是系統(tǒng)頻響函數(shù)矩陣的逆。顯然,當(dāng)系統(tǒng)的頻響函數(shù)矩陣為方陣并且非奇異,即激勵(lì)點(diǎn)與響應(yīng)測(cè)量點(diǎn)個(gè)數(shù)相同(頻響函數(shù)為n×n階矩陣),同時(shí)頻響函數(shù)矩陣的行列式在控制頻帶內(nèi)不等于零時(shí),解耦補(bǔ)償矩陣是唯一[9],即Z(ω)=H(ω)-1當(dāng)實(shí)際振動(dòng)試驗(yàn)中激勵(lì)點(diǎn)與響應(yīng)測(cè)量點(diǎn)個(gè)數(shù)不相等時(shí),系統(tǒng)頻響函數(shù)矩陣稱為長(zhǎng)方陣,例如m×n階矩陣。三軸振動(dòng)試驗(yàn)系統(tǒng)工作在共振點(diǎn)處,結(jié)構(gòu)的傳遞函數(shù)矩陣產(chǎn)生奇異,導(dǎo)致補(bǔ)償矩陣與頻響函數(shù)矩陣的乘積不等于單位陣,并由此產(chǎn)生較大的誤差,導(dǎo)致在共振點(diǎn)處的譜值難以控制[10]。在系統(tǒng)頻響函數(shù)為長(zhǎng)方陣或?yàn)槠娈愱嚂r(shí),解耦補(bǔ)償矩陣是不存在的,為了求出系統(tǒng)的頻響函數(shù)的逆,引入系統(tǒng)頻響函數(shù)矩陣的廣義逆或是偽逆,求解系統(tǒng)解耦補(bǔ)償矩陣。選用奇異值分解法來(lái)求解奇異陣的偽逆。
設(shè)Hm×n為系統(tǒng)估計(jì)頻響函數(shù),秩為r,U∈Cm×m、V∈Cn×n為兩正交矩陣,存在對(duì)角矩陣Λ∈Rm×n,有m×n矩陣H的奇異值分解如下(上標(biāo)“*”表示矩陣的共軛轉(zhuǎn)置)
(20)
式中:U和V分別為矩陣H的左奇異矩陣和右奇異矩陣;Λ為矩陣H的奇異值,且有Λr=diag(σ1,σ2,…,σr),σ1≥σ2≥…≥σr>0是方陣H*H特征值的平方根。因此,H的Moore-Penrose逆矩陣Z為
Z=H-1=VΛ-1U*
(21)

當(dāng)矩陣H接近奇異時(shí),Λ中至少有一個(gè)值接近零,Λ-1存在但值不穩(wěn)定,用奇異值截?cái)喾∕oore-Penrose逆矩陣求解補(bǔ)償矩陣。
奇異值分解方法是基于Householder變換,QR算法迭代進(jìn)行求解[11]。奇異值分解的數(shù)值算法精度很高,誤差略大于機(jī)器誤差,只要大于算法的誤差的奇異值都會(huì)被保留下來(lái),得到的奇異值矩陣中會(huì)有很小的奇異值,而且系統(tǒng)辨識(shí)越接近奇異,最小的奇異值越小。
矩陣的奇異性可用矩陣的奇異值來(lái)描述,例如方陣A是奇異陣,則A必定存在為零的奇異值。矩陣的奇異程度可用條件數(shù)來(lái)表示,而矩陣的條件數(shù)可用矩陣的特征值來(lái)描述,設(shè)方陣A可逆,則A的條件數(shù)可表示為
(22)
式中:cond(A)為相對(duì)于從屬范數(shù)的矩陣A的條件數(shù);σmax為方陣A的最大奇異值;σmin為方陣A的最小奇異值。
若H(f)奇異或接近奇異,對(duì)H(f)進(jìn)行奇異值分解后奇異值大小相差較大,較大的奇異值及其相應(yīng)的特征向量表示辨識(shí)模型中可靠部分,而不可靠部分通常是由較小的奇異值及其相應(yīng)的特征向量表示,由此設(shè)置一個(gè)正的參考閾值,當(dāng)矩陣內(nèi)的奇異值小于閾值時(shí),此時(shí)的奇異值剔除,即被視為零。該方法稱為奇異值截?cái)喾ǎ渚唧w實(shí)現(xiàn)過(guò)程如下:
(2)根據(jù)實(shí)際情況設(shè)置矩陣條件數(shù)M,當(dāng)cond(Λr)>M時(shí),則H(f)判定為奇異陣,對(duì)其進(jìn)行閾值剔除處理。
(3)設(shè)置閾值,剔除小于該值的奇異值,得到新奇異矩陣Λnew,同時(shí)剔除U,V中不可靠的小奇異值所對(duì)應(yīng)的列向量,得到新的正交矩陣Unew,Vnew。
3 三軸振動(dòng)試驗(yàn)系統(tǒng)功率譜復(fù)現(xiàn)控制算法
由于在實(shí)際試驗(yàn)中存在干擾和一些不確定因素的影響,圖2的控制過(guò)程中各個(gè)響應(yīng)點(diǎn)上的響應(yīng)信號(hào)都存在一定程度上的波動(dòng),導(dǎo)致控制結(jié)果仍然存在較大誤差。由于其為開環(huán)控制策略,系統(tǒng)易受外界因素影響,具有很大的不穩(wěn)定性,易損壞試驗(yàn)系統(tǒng)部件,因此并不能將其直接用于實(shí)際的工程中。為此需要引入一個(gè)反饋修正方案,通過(guò)不斷地對(duì)驅(qū)動(dòng)信號(hào)進(jìn)行迭代修正,使控制點(diǎn)的幅值和相位滿足要求。引入反饋后的控制修正過(guò)程如圖3所示。
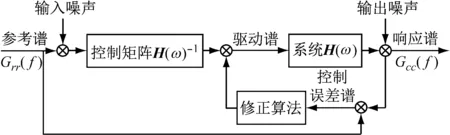
圖3 多輸入多輸出振動(dòng)試驗(yàn)修正控制框圖
對(duì)于上述修正迭代控制系統(tǒng),系統(tǒng)的初次辨識(shí)矩陣的逆并未得到修正,外部干擾信號(hào)將導(dǎo)致系統(tǒng)阻抗函數(shù)的解偏離,無(wú)法滿足控制精度要求,為了消除干擾噪聲對(duì)系統(tǒng)的影響,提出奇異值截?cái)嗫刂扑惴ǎ到y(tǒng)解耦控制原理如圖4所示,其控制過(guò)程主要包括頻響函數(shù)估計(jì)、阻抗計(jì)算和驅(qū)動(dòng)信號(hào)控制三部分。
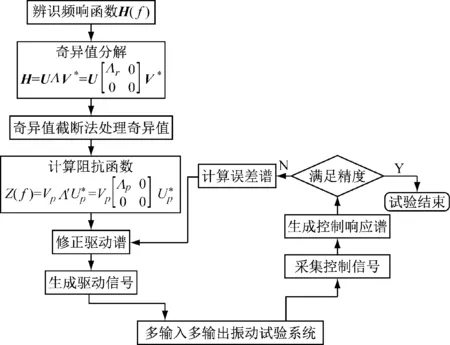
圖4 解耦控制算法框圖
3.1 三軸振動(dòng)試驗(yàn)系統(tǒng)頻響函數(shù)估計(jì)
由圖4知,由于頻響函數(shù)與系統(tǒng)阻抗是根據(jù)系統(tǒng)的特性得到的,所以頻響函數(shù)的辨識(shí)和阻抗計(jì)算的精度對(duì)整個(gè)系統(tǒng)的控制效果至關(guān)重要。考慮耦合特性的影響,輸入、輸出信號(hào)中噪聲影響,根據(jù)前面討論頻響函數(shù)估計(jì)方法特點(diǎn),采用HV估計(jì)法辨識(shí)出系統(tǒng)頻響函數(shù)矩陣HV(f)。
3.2 三軸振動(dòng)試驗(yàn)系統(tǒng)阻抗計(jì)算
采用Moore-Penrose逆矩陣對(duì)系統(tǒng)阻抗函數(shù)Z(f)的辨識(shí),將辨識(shí)得到的系統(tǒng)阻抗函數(shù)Z(f)作為控制器傳遞函數(shù),應(yīng)用到系統(tǒng)辨識(shí)模型H(f)中,實(shí)現(xiàn)對(duì)系統(tǒng)有效控制。其計(jì)算過(guò)程如下
(2)通過(guò)設(shè)定矩陣條件數(shù)的大小M,對(duì)奇異值采用截?cái)喾ㄟM(jìn)行閥值剔除處理;
(3)根據(jù)奇異值截?cái)喾ㄌ幚砗蟮玫降男抡魂嘦new,Vnew計(jì)算系統(tǒng)阻抗函數(shù)為
(23)
3.3 三軸振動(dòng)試驗(yàn)系統(tǒng)驅(qū)動(dòng)信號(hào)控制
功率譜復(fù)現(xiàn)試驗(yàn)采用驅(qū)動(dòng)功率譜迭代修正控制策略,驅(qū)動(dòng)功率譜迭代修正控制具有算法簡(jiǎn)單、收斂速度快的特點(diǎn)。由于系統(tǒng)傳遞函數(shù)的辨識(shí)精度直接決定了驅(qū)動(dòng)功率譜迭代修正算法的精度和收斂性,當(dāng)系統(tǒng)中存在較強(qiáng)的非線性因素時(shí),系統(tǒng)辨識(shí)精度下降,可能導(dǎo)致驅(qū)動(dòng)譜迭代修正算法發(fā)散。因此需要對(duì)系統(tǒng)辨識(shí)函數(shù)進(jìn)行迭代修正以提高其精度,進(jìn)而保證驅(qū)動(dòng)譜修正算法收斂。驅(qū)動(dòng)譜迭代修正控制算法包括對(duì)振動(dòng)臺(tái)系統(tǒng)阻抗函數(shù)(逆?zhèn)鬟f函數(shù))的修正及振動(dòng)臺(tái)驅(qū)動(dòng)功率譜的實(shí)時(shí)迭代和修正。振動(dòng)臺(tái)驅(qū)動(dòng)功率譜迭代修正方程為

基于驅(qū)動(dòng)譜修正迭代控制算法的功率譜復(fù)現(xiàn)試驗(yàn)控制過(guò)程主要分為5個(gè)步驟:
步驟1采用HV估計(jì)法辨識(shí)試驗(yàn)系統(tǒng)初始傳遞函數(shù)辨識(shí)并求逆,辨識(shí)得到的傳遞函數(shù)及其逆(阻抗函數(shù))為HV(f)0,Z(f)0,關(guān)系可以表示為
(24)
步驟2初始驅(qū)動(dòng)功率譜計(jì)算如下式,并生成驅(qū)動(dòng)信號(hào)激勵(lì)系統(tǒng)
(25)
d(t)0=IFFT(Gdd(f)0)
(26)

步驟3測(cè)量響應(yīng)功率譜與控制誤差譜
Gcc(f)k=FFT(c(t)k)
(27)
Gee(f)k=Grr(f)-Gcc(f)k
(28)
式中:Gcc(f)k為第k次迭代的響應(yīng)譜;Gee(f)k為第k次迭代的控制誤差譜。
步驟4根據(jù)第k次辨識(shí)的系統(tǒng)阻抗函數(shù)及誤差,運(yùn)用迭代算法修正系統(tǒng)的驅(qū)動(dòng)功率譜。
(29)
步驟5通過(guò)頻域隨機(jī)化和時(shí)域隨機(jī)化將驅(qū)動(dòng)譜轉(zhuǎn)換成時(shí)域驅(qū)動(dòng)信號(hào)驅(qū)動(dòng)系統(tǒng)。
4 三軸振動(dòng)試驗(yàn)控制系統(tǒng)試驗(yàn)研究
為了驗(yàn)證論文系統(tǒng)建模及控制算法的有效性及精度,搭建三軸振動(dòng)試驗(yàn)系統(tǒng)試驗(yàn)平臺(tái)進(jìn)行試驗(yàn)。圖5是由杭州億恒科技有限公司提供的三軸振動(dòng)實(shí)驗(yàn)臺(tái);圖6是由杭州億恒科技有限公司開發(fā)的Premax多軸振動(dòng)控制器,具有110 dB動(dòng)態(tài)范圍、精度高,多通道DSP(Digital Signal Processor)并行高速實(shí)時(shí)處理,易擴(kuò)展及高可靠性等特點(diǎn),PREMAX獨(dú)立于PC機(jī)完成信號(hào)的分析和控制,采用千兆以太網(wǎng)與PC機(jī)相連,通過(guò)PC機(jī)顯示對(duì)信號(hào)進(jìn)行監(jiān)測(cè)。

圖5 三軸向振動(dòng)試驗(yàn)臺(tái)
三軸振動(dòng)實(shí)驗(yàn)控制系統(tǒng)頻響函數(shù)HV辨識(shí)結(jié)果如圖7所示:系統(tǒng)X、Y軸向傳遞函數(shù)基本相同,共振點(diǎn)在1 200 Hz和1 800 Hz左右,反共振點(diǎn)在750 Hz左右,Z軸向傳遞函數(shù)與X、Y向的有一定的差異,共振點(diǎn)在1 300 Hz左右,反共振點(diǎn)在1 000 Hz左右,三軸向辨識(shí)得到的傳遞函數(shù)雖然存在共振峰及反共振峰(奇異點(diǎn)),但其峰值較小,均控制在試驗(yàn)規(guī)定的范圍內(nèi),由此可知用HV頻響函數(shù)估計(jì)法精度較高,滿足實(shí)驗(yàn)需求。

圖6 Premax多軸振動(dòng)控制器
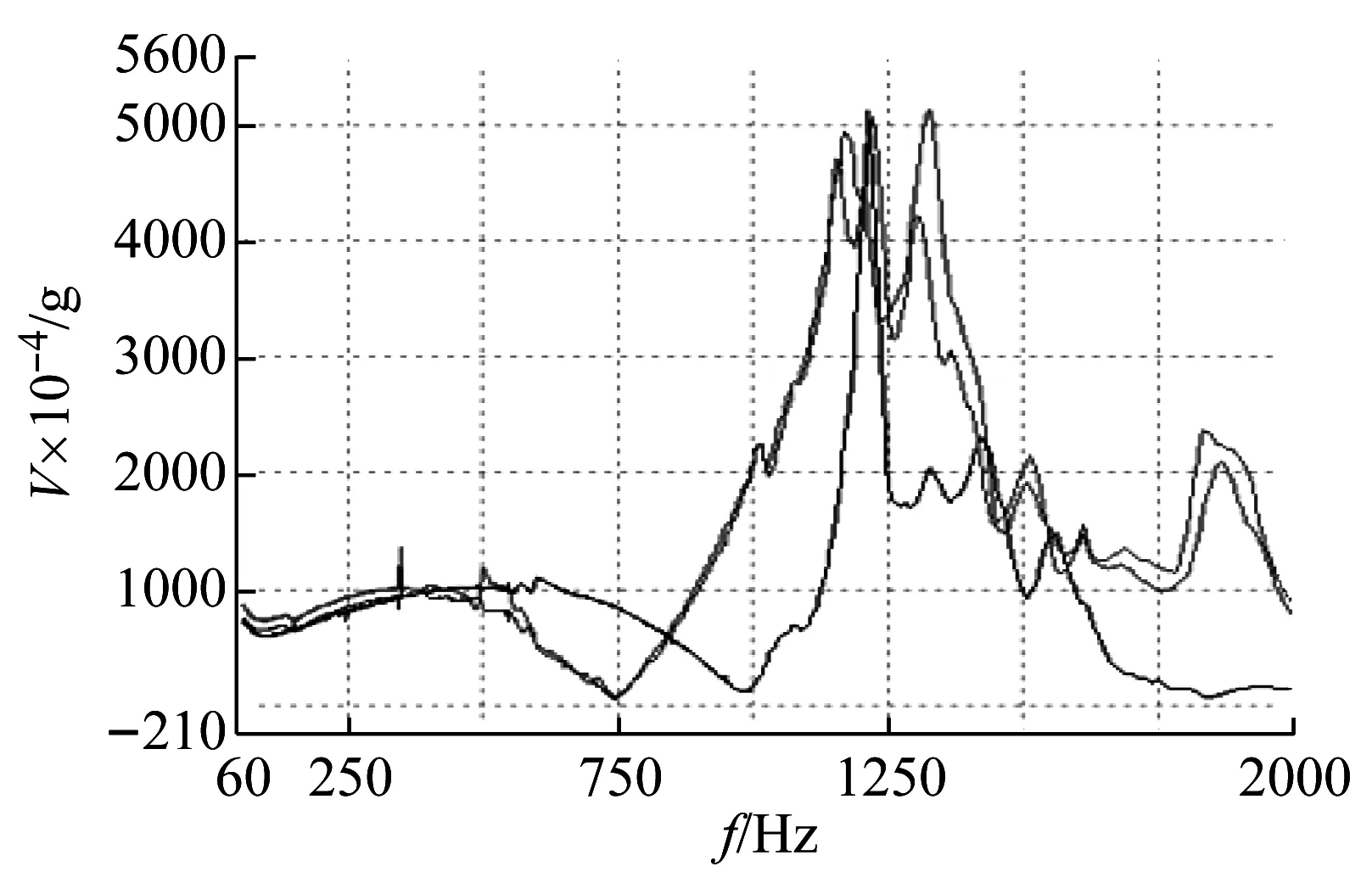
圖7 系統(tǒng)HV頻率響應(yīng)函數(shù)估計(jì)結(jié)果
三軸振動(dòng)臺(tái)功率譜復(fù)現(xiàn)試驗(yàn)結(jié)果如圖8所示,目標(biāo)加速度有效值為4g,圖8從上往下依次可得X、Y、Z軸測(cè)得控制有效值分別為3.968 3g、3.953 1g、4.100 8g,功率譜密度范圍設(shè)置為20~2 000 Hz,整個(gè)頻率范圍內(nèi)為平直段功率譜密度,幅值為0.01 g2/Hz。由三軸振動(dòng)試驗(yàn)系統(tǒng)自閉環(huán)控制試驗(yàn)結(jié)果可知:設(shè)置的頻率范圍內(nèi)的功率譜都達(dá)到很好的控制效果,各軸控制響應(yīng)譜均在目標(biāo)譜的±3 dB范圍內(nèi),滿足工程試驗(yàn)要求。
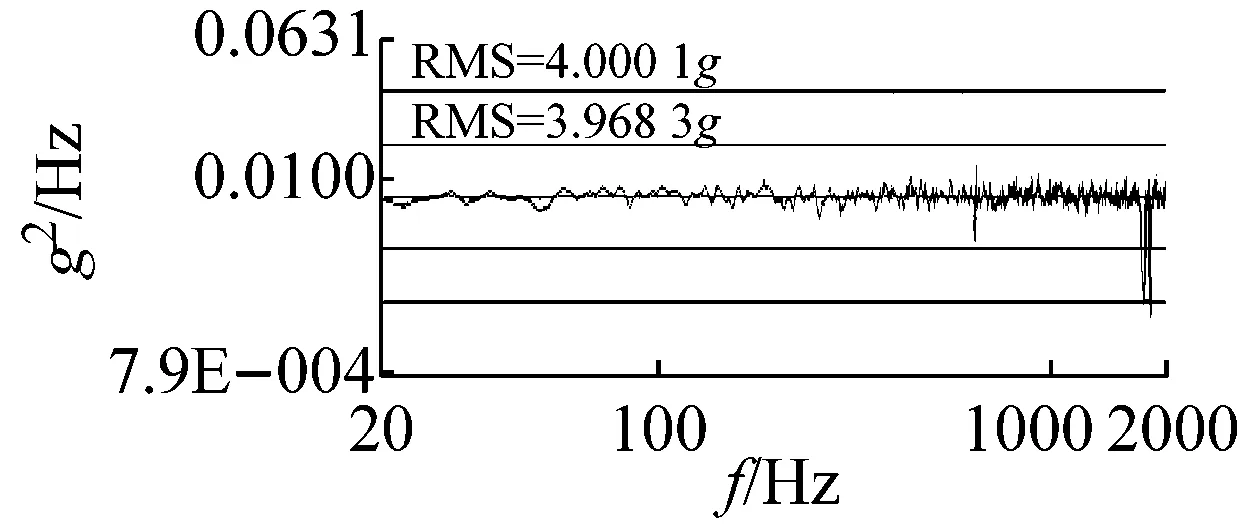
(a)X軸控制結(jié)果

(b)Y軸控制結(jié)果

(c)Z軸控制結(jié)果
圖8 三軸振動(dòng)試驗(yàn)臺(tái)X、Y、Z軸功率譜復(fù)現(xiàn)結(jié)果
Fig.8X、Y、Zaxis power spectrum retrieval result on three-axis vibration experimental table
5 結(jié) 論
本文利用HV頻響函數(shù)估計(jì)法對(duì)三軸振動(dòng)實(shí)驗(yàn)系統(tǒng)進(jìn)行了系統(tǒng)辨識(shí);針對(duì)辨識(shí)函數(shù)出現(xiàn)奇異值情況,設(shè)置閾值進(jìn)行奇異值截?cái)啾WC算法的穩(wěn)定性,并用迭代控制算法修正驅(qū)動(dòng)譜以提高振動(dòng)控制精度;最后運(yùn)用集成該控制算法的多輸入多輸出振動(dòng)控制器與三軸振動(dòng)試驗(yàn)臺(tái)搭建的平臺(tái)進(jìn)行試驗(yàn),對(duì)整個(gè)實(shí)驗(yàn)過(guò)程與結(jié)果進(jìn)行分析有如下結(jié)論:
(1)三軸振動(dòng)控制系統(tǒng)HV頻響函數(shù)辨識(shí)法所得系統(tǒng)X、Y軸向傳遞函數(shù)基本相同,共振點(diǎn)在1 200 Hz和1 800 Hz左右,反共振點(diǎn)在750 Hz左右,Z軸向傳遞函數(shù)與X、Y向的有一定的差異,共振點(diǎn)在1 300 Hz左右,反共振點(diǎn)在1 000 Hz左右,三軸向辨識(shí)得到的傳遞函數(shù)雖然存在共振峰及反共振峰(奇異點(diǎn)),但其峰值較小,均控制在試驗(yàn)規(guī)定的范圍內(nèi),系統(tǒng)頻響函數(shù)估計(jì)精度較高。
(2)三軸振動(dòng)臺(tái)功率譜復(fù)現(xiàn)試驗(yàn)顯示,目標(biāo)有效值為4g,X、Y、Z軸測(cè)得控制有效值分別為3.968 3g、3.953 1g、4.100 8g,均在規(guī)定范圍值內(nèi)。
(3)三軸振動(dòng)試驗(yàn)系統(tǒng)自閉環(huán)控制試驗(yàn)在設(shè)置的頻率范圍內(nèi)的功率譜都達(dá)到很好的控制效果,各軸上控制響應(yīng)譜均在目標(biāo)譜的±3 dB范圍內(nèi),滿足工程試驗(yàn)要求。
[1] CHONG K S, GWEE B H. A 16-channel low-power nonuniform spaced filter bank core for digital hearing aids[J]. IEEE Trans. on Circuits and Systems II: Express Briefs, 2006, 53(9):853-857.
[2] SLOANE E A. Vibration testing environment or apparatus[J]. Sound and Vibration Bulletin, 1973, 2: 165-182.
[3] SMALLWOOD D O. A random vibration control system for testing a single test item with multiple inputs[C]//SAE Aerospace Meeting. Warrendale: SAE, 1982.
[4] TUSTIN W. Fifth edition of Harris’ shock and vibration handbook reviewed[J]. Test Engineering and Management, 2002, 64(1): 30.
[5] 欒強(qiáng)利. 液壓振動(dòng)實(shí)驗(yàn)控制系統(tǒng)關(guān)鍵技術(shù)研究[D]. 杭州:浙江大學(xué),2015.
[6] 吳吉平. 多輸入多輸出頻域正交多項(xiàng)式模態(tài)參數(shù)識(shí)別方法[D]. 長(zhǎng)沙:中南大學(xué), 2002.
[7] 劉良玉. 多輸入多輸出頻域模型參數(shù)識(shí)別[D]. 西安:西安電子科技大學(xué), 2013.
[8] 杜永昌, 管迪華. 多輸入多輸出頻域模態(tài)識(shí)別算法的探討[J]. 清華大學(xué)學(xué)報(bào)(自然科學(xué)版), 1997, 37(11): 63-66.
DU Yongchang, GUAN Dihua. Study of multiple input multiple output frequency domain parameter estimation method[J]. Journal of Tsinghua University (Science and Technology), 1997, 37(11): 63-66.
[9] 朱銀龍. 多輸入多輸出正弦振動(dòng)試驗(yàn)控制系統(tǒng)的研究[D]. 南京:南京航空航天大學(xué), 2007.
[10] 韓軍, 鮑明, 倪宏偉. 進(jìn)化規(guī)劃在多振動(dòng)臺(tái)隨機(jī)振動(dòng)控制中的應(yīng)用[J]. 中國(guó)機(jī)械工程, 2003, 14(13): 26-29.
HAN Jun, BAO Ming, NI Hongwei. An improved method based on evolutionary programming for multi-shaker random vibration control[J]. China Mechanical Engineering, 2003, 14(13): 26-29.
[11] 范銳. 輪耦合道路模擬臺(tái)波形再現(xiàn)控制算法的研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué), 2013.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
