電流自適應控制抑制開關磁阻電機轉矩脈動
2018-02-27 11:13:08黨選舉苗茂宇伍錫如
振動與沖擊 2018年3期
黨選舉, 苗茂宇, 姜 輝, 伍錫如, 李 珊
(1.桂林電子科技大學 電子工程與自動化學院,廣西 桂林 541004;2.桂林電子科技大學 教學實踐部,廣西 桂林 541004)
開關磁阻電機為雙凸極變磁阻電機,轉子極既無繞組亦無永磁體,定子極繞有集中繞組,其運動由定、轉子間氣隙磁阻的變化產生,具有結構簡單、效率高、運行穩定可靠、成本低廉、易于維護等諸多優點。然而其雙凸極結構、電磁特性的高度非線性和強耦合性,導致其運行時轉矩脈動較大,由轉矩脈動導致的噪聲和振動問題嚴重制約其應用和發展。故開關磁阻電機轉矩脈動抑制成為近年來研究的熱點。
為了抑制轉矩脈動,國內外學者進行了多方面的研究,并取得大量研究成果。主流研究方向大體可以分為電機結構和控制策略兩個部分,在電機控制策略方面常用轉矩分配函數法(Torque Sharing Function,TSF)和直接轉矩控制法(Direct Torque Control,DTC)。其中轉矩分配控制多應用于抑制SRM(Switched Reluctance Motor)轉矩脈動[1],該策略通過合適的分配函數,使轉矩在換相期間平滑過渡,加以合適的控制策略可使SRM輸出轉矩平穩跟蹤給定參考轉矩。文獻[2]對比分析了直接轉矩控制和轉矩分配控制兩種控制策略的控制效果,在磁鏈特性未知的情況下,TSF的控制效果更明顯;文獻[3]分別以線性TSF和余弦TSF控制設計各相轉矩,分析分配函數的不同對控制效果的影響;文獻[4]提出轉矩-電流的非線性模型,提高了模型的準確性,但是未給出未知參數的具體辨識過程;文獻[5]提出電流分配(Current Sharing Function,CSF)和磁鏈分配(Flux Linkage Sharing Function,FSF)控制策略,實現對電流或磁鏈的直接滯環控制,避開直接尋找轉矩-電流的非線性關系,控制靈敏度高;文獻[6]引入有限差分擴展卡爾曼濾波(Finite-Difference Extended Kalman Filter,FDEKF)預測轉速,實現無速度傳感器魯棒控制,優化電機的控制結構;文獻[7]在傳統轉矩分配控制的基礎上引入迭代學習控制器,以轉矩偏差最小為控制目標,對參考電流進行迭代學習,有效抑制了SRM的轉矩脈動。
上述方案的主體控制思路均是從SRM轉矩-電流的非線性關系角度,避開或間接補償其非線性關系,但存在兩方面問題,一方面未給出非線性關系的具體辨識過程,另一方面未對參考電流進行實時的反饋補償,致使其非線性關系難以準確獲得,進而導致控制效果不佳的缺陷。

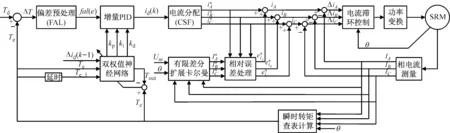
圖1 電流自適應控制抑制開關磁阻電機轉矩脈動系統框圖
1 基于雙權值神經網絡的SRM自適應電流控制算法
SRM是一個變結構、變參數的強非線性系統,難以獲得精確的數學模型。針對傳統轉矩分配控制的缺點,該文提出DWNN來辨識Δid和Te的非線性關系,進而求得對應參考電流,其控制結構如圖2所示。
Δid和Te的非線性關系在高維空間中為一張復雜曲面,改進后的DWNN可以根據需要自適應構造出不同類型的超曲面去逼近,有效克服經典神經網絡只能用單一類型曲面逼近的弊端。故相對而言,DWNN能夠更好地逼近SRM的非線性,其學習結構如圖3所示。
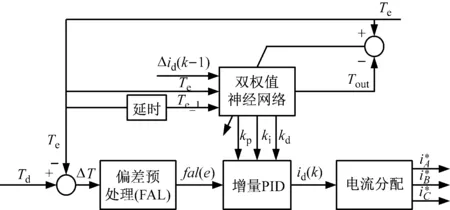
圖2 基于轉矩偏差的DWNN自適應PID控制結構
Fig.2 Structure of self-adaptive PID control of DWNN based on torque deviation
1.1 改進的DWNN的自適應PID控制
1.1.1 改進的DWNN
傳統DWNN隱含層輸出[8]為

圖3 DWNN的學習結構
(1)
式(1)存在兩點不足:①次冪b為固定值,無法根據需要自適應構造不同類型的超曲面,則控制的快速性及準確性降低;②兩種權值的次冪都為b,次冪b的改變同時改變兩種權值的大小,導致控制靈敏度降低。
該文針對其不足進行改進,加入次冪的自適應調整,改進后的神經元函數為
(2)
式中:hj為隱含層輸出函數;f(x)為激活函數;Tout為辨識網絡輸出轉矩;wij為方向權值;qij為核心權值;vj為輸出權值;bij為可調整的次冪;該文取a=0.1,m=1。
辨識器的性能指標函數為
(3)
根據梯度下降法,輸入方向權值、核心權值、輸出權值及次冪bij的迭代算法為
(4)
式中:η為權值調整學習率;ηb為次冪調整學習率。
1.1.2 增量自適應PID的控制
參考電流id(k)為DWNN自適應PID控制算法的輸出u(k),以DWNN辨識的轉矩偏差最小為目標進行權值調整,進而調整增量PID的三個系數kp、ki、kd,求出控制量的增量Δu(k),與k-1時刻的控制量u(k-1)疊加,可求得控制量u(k),經典的增量式PID公式為
u(k)=u(k-1)+Δu(k)
(5)
Δu(k)=kp(e(k)-e(k-1))+kie(k)+
kd(e(k)-2e(k-1)+e(k-2))
(6)
式中:e(k)為k時刻的轉矩偏差。
該文引入非線性函數對轉矩偏差進行預處理,使控制器實現理想的控制方式,即“小誤差,大增益,大誤差,小增益”[9],具體計算公式[10]為
(7)
式中:α為非線性因子;δ為線性區間長度。取

(8)
由上可知,經偏差預處理后的增量PID變為
(9)
增量PID系數kp、ki、kd的調整采用梯度下降法,選取性能指標函數為
(10)
經偏差預處理后,kp、ki、kd的迭代算法為
(11)

(12)
式中:k時刻的控制量增量Δid(k)未知,由于采樣時間短,故用k-1時刻的增量Δid(k-1)近似代替,由此帶來的計算誤差可以通過學習率的調整來進行修正。
1.2 電流分配函數的選擇
常用的轉矩分配函數有直線型、指數型、正弦型和立方型四種,綜合比較四種分配函數的運算量和控制效果,該文選擇立方分配函數。
立方分配函數的數學表達式為
(13)
其中:θ為轉子位置角;θon為開通角;θov為換相重疊角。

(14)
2 基于有限差分擴展卡爾曼濾波預測電流的前饋補償控制
2.1 基于FDEKF預測電流的總體設計
為實現對參考電流的實時控制,該文提出了參考電流的前饋補償控制,通過FDEKF一步預測出電流,將其與DWNN輸出的參考電流之差疊加到參考電流,控制輸出電流逼近參考電流,進而使輸出轉矩穩定在給定的參考轉矩附近,間接抑制SRM的轉矩脈動。其基本框架如圖4所示,在電機單相導通的情況下,電機模型相對較準確,如果噪聲為已知高斯噪聲,則FDEKF可實時捕捉SRM的非線性特性,準確預測出非線性電流。

圖4 基于FDEKF預測電流的前饋補償控制結構
Fig.4 Structure of feed-forward compensation control based on the FDEKF to predict current
SRM的相電流、轉速和角度的狀態方程為
(15)

2.2 基于FDEKF的電流預測
A、B、C三相電流的預測過程類似,該文以B相電流預測為例,詳細介紹FDEKF預測電流的實現流程[11]。取狀態量Xm=[Imwθ]T,令m=B,則XB的預測過程為
(1) 濾波初始化

式中:Q為過程激勵噪聲協方差矩陣;R為觀測噪聲協方差矩陣。
(2) 狀態及相應誤差協方差陣的預測
XB,k+1/k=f(XB,k/k)+ωk
(16)
式中:ωk為過程激勵噪聲矩陣;XB,k/k為第k次狀態預測值;f(x)為狀態轉移函數,由式(15)可得。
用一階中心方差得出誤差協方差矩陣為
(17)
(3) 測量值預測
YB,k+1/k=HXB,k+1/k
(18)
式中:H為觀測矩陣。
(4) 卡爾曼增益計算
KB=PB,k+1/kHT(HPB,k+1/kHT+R)-1
(19)
(5) 狀態預測值及協方差矩陣的更新
(20)
式中:YB,k+1為實際測量值;I為單位陣。
(6) 協方差矩陣的Choleskey分解
SXB,(k+1/k+1)={chol(PB,k+1/k+1)}
(21)
同理,取m=A或m=C可推出
XA,k+1/k+1=XA,k+1/k+KA(YA,k+1-YA,k+1/k)
(22)
XC,k+1/k+1=XC,k+1/k+KC(YC,k+1-YC,k+1/k)
(23)
式中:XA,k+1/k和XC,k+1/k分別為狀態XA和XC的預測值,借鑒式(16)求得;YA,k+1/k和YC,k+1/k為狀態XA和XC的預測測量值,借鑒式(18)求得;KA與KC分別為狀態XA和XC的卡爾曼增益,借鑒式(19)求得。
由上可知,FDEKF預測的三相電流為
(24)
以轉子位置角θ為參考,在單相導通區,按上述方法求得單相導通電流即可,在換相區,求得導通相和關斷相電流即可,其余相電流值為0,無需預測。
2.3 參考電流的前饋補償
(25)
前饋補償后得到三相控制電流iA、iB和iC為
(26)
3 仿真驗證與分析
為驗證該文所提控制策略的有效性,在Matlab/Simulink仿真環境下,對開關磁阻電機控制系統進行建模,加入控制算法進行仿真研究。其中,電機模型為采用12/8極結構的SRM非線性模型[12],電機模型的主要參數選擇如表1所示。
3.1 SRM的控制性能指標
SRM的控制性能指標選擇轉矩脈動系數[13],其定義為
(27)

表1 SRM的主要參數
式中:Tmax為SRM的最大瞬時轉矩;Tmin為SRM的最小瞬時轉矩;Tav為SRM的平均轉矩。
3.2 仿真結果對比
該文對傳統轉矩分配控制進行仿真,結果如圖5所示,可知轉矩脈動較大,轉矩脈動系數為46.42%。圖6為基于轉矩偏差的DWNN自適應PID的控制結果,轉矩脈動明顯減小,穩態時轉矩脈動系數可達2.56%。電流自適應控制抑制SRM轉矩脈動的控制結果如圖7所示,可知SRM的輸出轉矩能夠快速平穩的跟蹤給定轉矩,系統響應快,轉矩超調量和轉矩脈動都很小,穩態時轉矩脈動系數為1.65%。綜合對比見表2,該文所提電流自適應控制抑制SRM轉矩脈動控制策略的控制效果明顯,有效減小轉矩脈動。
圖8為傳統轉矩分配控制下的單相參考電流;圖9為電流自適應控制抑制SRM轉矩脈動的單相參考電流波形,對比可知,處理后的參考電流具有SRM的非線性特性,在一定程度上修正了非線性電感不可測所導致的控制偏差,大幅度減小了轉矩脈動。

圖5 傳統轉矩分配(TSF)控制的轉矩波形
Fig.5 Torque waveform of traditional TSF control

圖6 基于轉矩偏差的DWNN自適應PID控制的轉矩波形
Fig.6 Torque waveform of self-adaptive PID control of DWNN based on torque deviation

圖7 電流自適應控制抑制SRM轉矩脈動的轉矩波形
Fig.7 Torque waveform of torque ripple suppression of SRM based on current self-adaptive control

圖8 傳統轉矩分配控制的電流波形

圖9 電流自適應控制抑制SRM轉矩脈動的電流波形
Fig.9 Current waveform of torque ripple suppression of SRM based on current self-adaptive control

表2 轉矩脈動系數對比
4 結 論
該文以傳統轉矩分配為基礎,為改善系統動態性能,加入偏差預處理,實現“小誤差,大增益,大誤差,小增益”的控制,以此為基礎設計了DWNN自適應PID的電流控制,得到三相參考控制電流,并采用FDEKF一步預測電流,構成參考電流的前饋補償控制,實現SRM轉矩的平滑輸出,達到抑制SRM轉矩脈動的目的。仿真結果表明,該文所提電流自適應控制抑制開關磁阻電機轉矩脈動的控制策略,穩態時輸出轉矩快速地收斂到給定轉矩,大幅減小轉矩脈動。
[1] CHOI C, KIM S, KIM Y, et al. A new torque control method of a switched reluctance motor using a torque-sharing function[J]. IEEE Transactions on Magnetics, 2002, 38(5):3288-3290.
[2] SUN Q, WU J, GAN C, et al. Investigation of direct torque control and torque sharing function strategy for switched reluctance motor applications[C]∥ International Conference on Electrical Machines and Systems. Pattaya: IEEE, 2015:864-868.
[3] KURIAN S, NISHA G K. Torque ripple minimization of SRM using torque sharing function and hysteresis current controller[C]∥ International Conference on Control Communication & Computing India. Trivandrum: IEEE, 2015:149-154.
[4] YE J, BILGIN B, EMADI A. An offline torque sharing function for torque ripple reduction in switched reluctance motor drives[J]. IEEE Transactions on Energy Conversion, 2015, 30(2):1-10.
[5] WANG J J. A common sharing method for current and flux-linkage control of switched reluctance motor[J]. Electric Power Systems Research, 2016, 131:19-30.
[6] OUDDAH N, LOUKKAS N, CHAIBET A, et al. Experimental evaluation of second sliding modes observer and extended Kalman filter in a sensorless robust control of switched reluctance motor for EV application[C]∥Control and Automation. Torremolions: IEEE, 2015:986-992.
[7] 黨選舉, 肖逢, 林誠才. 基于電流迭代優化的SRM總轉矩TSF閉環控制[J]. 電氣傳動, 2015, 45(8):41-46.
DANG Xuanju, XIAO Feng, LIN Chengcai. Closed loop control of total torque TSF for switched reluctance motor based on current iteration optimization[J]. Electric Drive, 2015, 45(8): 41-46.
[8] 曹宇. 雙權值人工神經網絡用于數據擬合的研究[D]. 北京:中國科學院半導體研究所, 2002:1-45.
[9] 韓京清. 從PID技術到“自抗擾控制”技術[J]. 控制工程, 2002, 9(3):13-18.
HAN Jingqing. From PID to "active disturbance rejection control technique"[J]. Control Engineering of China, 2002, 9(3): 13-18.
[10] 劉福才, 陳鑫, 賈亞飛,等. 模糊自抗擾控制器在撓性航天器振動抑制中的應用[J]. 振動與沖擊, 2015,34(9):9-14.
LIU Fucai, CHEN Xin, JIA Yafei, et al. Application of fuzzy auto disturbance rejection controller in flexible spacecraft vibration suppression[J]. Journal of Vibration and Shock, 2015,34(9): 9-14.
[11] WU C, HAN C. Strong tracking finite-difference extended Kalman filtering for ballistic target tracking[C]∥IEEE International Conference on Robotics & Biomimetics. Sanya: IEEE, 2007:1540-1544.
[12] 王宏華. 開關磁阻電動機調速控制技術[M]. 2版.北京:機械工業出版社, 2014:1-264.
[13] DOWLATSHAHI M, NEJAD S M S, MOALLEM M, et al. Torque ripple reduction of switched reluctance motors considering copper loss minimization[C]∥IEEE International Conference on Industrial Technology. Busan: IEEE, 2014:858-865.
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
