智能汽車非時間參考的螺旋彎曲坡道路徑跟蹤控制
2018-02-21 01:54:08江浩斌張旭培馬世典
重慶理工大學學報(自然科學) 2018年12期
江浩斌,張旭培,馬世典
(江蘇大學 a.汽車與交通工程學院; b.汽車工程研究院, 江蘇 鎮江 212013)
自動泊車、自動駕駛等智能化技術是目前國內外汽車技術的研究熱點[1-2]。全工況自主泊車既是自動泊車技術的發展方向,也是無人駕駛汽車的關鍵技術之一。對于智能汽車而言,在從地面進入地下停車場過程中,經常遇到螺旋彎曲坡道,要完成從地面到地下停車場的自主泊車,關鍵技術之一是智能汽車能夠在螺旋彎曲坡道上安全穩定地自主行駛,其中在螺旋彎曲坡道上的路徑跟蹤尤為重要。
二維(平面)路徑跟蹤控制已有不少研究成果,大多采用減少預瞄橫向偏差的控制策略進行路徑跟蹤控制[3-10],但是預瞄橫向偏差在螺旋彎曲坡道上較難定義并獲取。智能汽車在空間約束較強的螺旋彎曲坡道上自主行駛時,可能存在長時間停車避撞的行為,且基于時間變量的路徑跟蹤控制策略受時間和車速的影響較大,當智能汽車行駛過程中移動停止時,控制誤差會隨時間延長不斷增大[11]。因此,當采用非時間參考控制策略進行路徑跟蹤時,控制器輸出是基于設定的非時間參考量,當智能汽車停車避撞或停止移動,非時間參考量停止增加,控制器輸出停止變化,相應控制誤差不再增加[12-13]。目前,針對智能汽車在進入地下停車場的螺旋彎曲坡道中自主行駛路徑跟蹤的相關研究尚未見公開報道。
本文針對智能汽車在螺旋彎曲坡道內自主行駛的路徑跟蹤問題,通過分析汽車在螺旋彎曲坡道行駛的特點,建立智能汽車三維運動學模型;針對在三維空間內位置跟蹤的三參數特點,提出以Z軸位置變量為非時間參考的因變量的路徑跟蹤控制方法,將三維空間位置跟蹤的3個參數轉化為二維平面位置跟蹤的2個參數,期望路徑就是一條幾何曲線[14];采用非時間參考控制策略進行螺旋彎曲坡道路徑跟蹤,通過Carmaker與Simulink聯合仿真,驗證非時間參考控制律在螺旋彎曲坡道的路徑跟蹤的有效性。
1 智能汽車在彎曲坡道的自主行駛過程分析
智能汽車在地下停車場彎曲坡道的自主行駛過程如圖1所示,具體描述如下:
1) 地下停車場彎曲坡道自主行駛系統開啟后,通過車身四周的雷達傳感器檢測汽車相對于坡道的位置。
2) 自主行駛系統根據彎曲坡道高精地圖及汽車當前位置,確定自主行駛的起始點并規劃行駛路徑。
3) 自主行駛系統根據規劃的路徑,通過控制車速和方向盤轉角使汽車沿目標路徑行駛。
4) 在路徑跟蹤的過程中,自主行駛系統需要通過傳感器實時監測前方行駛區域是否有障礙物,若前方行駛區域存在障礙物,自主行駛系統需在狹小空間內進行車輛避障控制。
5) 當智能汽車自主行駛到地下停車場彎曲坡道的出口(即地下停車場彎曲坡道),自主行駛過程結束。
假設智能汽車在地下停車場彎曲坡道的行駛路徑已成功規劃,本文將進行步驟3)的工作,即對自主行駛中的汽車路徑跟蹤控制進行研究。
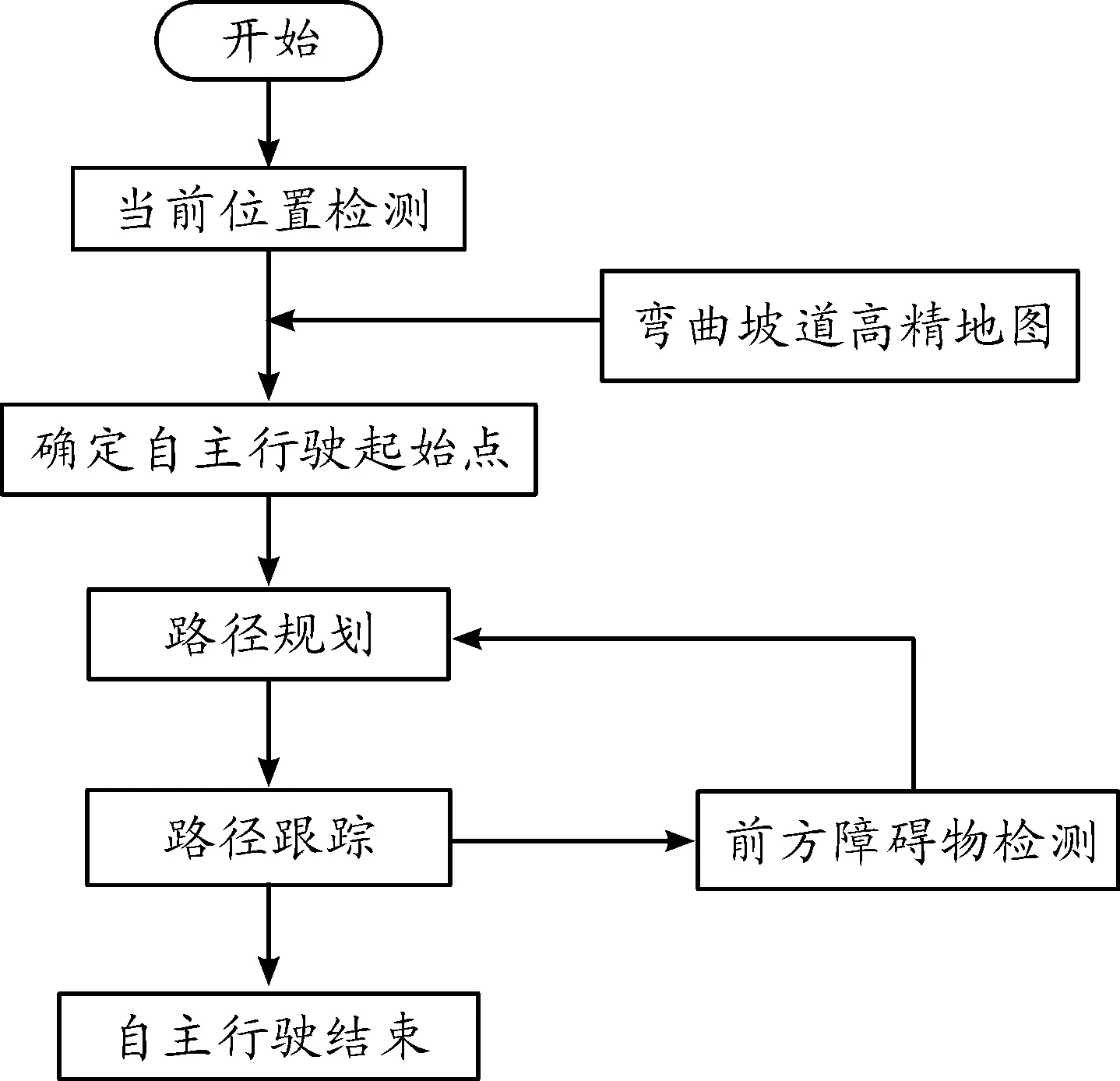
圖1 智能汽車彎曲坡道自主行駛決策流程
2 車輛運動學模型
智能汽車在進入地下停車場的彎曲坡道自主行駛速度較低,因此忽略汽車的側向滑動,將汽車視為具有非完整性的運動系統,其運動學方程可表示為:
(1)
由Ackerman轉向幾何原理可知:R=L/tan(φ),其中:φ為前軸等效轉角;L為車輛軸距。車輛在X-Y平面的轉向運動幾何原理如圖2所示。

圖2 Ackerman轉向運動幾何原理
3 非時間參考路徑跟蹤控制律
3.1 路徑跟蹤問題分析
智能汽車在地下停車場彎曲坡道自主行駛的路徑跟蹤問題可描述為:汽車在彎曲坡道內低速自主行駛,自主行駛系統采用合適的方向盤轉角控制律調整方向盤轉角,使智能汽車沿規劃好的路徑自主行駛。由式(1)可知,當智能汽車軸距及當前坡道坡度確定后,汽車行駛速度及方向盤轉角決定了后軸中點的行駛軌跡。因此,選擇后軸中點為研究對象,在低速行駛工況下,研究智能汽車方向盤轉角控制策略,控制汽車后軸中心沿已規劃的路徑行駛。
3.2 非時間參考路徑跟蹤控制律

(2)
對于任意給定的空間幾何路徑f(xr,yr,zr,θr)=0,選取一個隨時間單調遞增的非時間參考量s,根據非時間參考量s尋找反饋控制律,對于任意給定ε>0,存在S>0,使得當s>S時,|f(x,y,z,θ)-f(xr,yr,zr,θr)|<ε,f(xr,yr,zr,θr)為目標路徑,xr、yr、zr、θr為軌跡上的目標位置[15]。其中:xr為智能汽車后軸中心的目標X軸坐標,yr為智能汽車后軸中心的目標Y軸坐標;θr為車輛后軸中心的X軸坐標映射到目標路徑上的航向角。由于本文選擇-z(t)為非時間參考量,因此僅需考慮X-Y平面位置誤差和航向角誤差。根據圖3所示的X-Y平面跟蹤偏差,確定路徑跟蹤偏差,如式(3)所示。
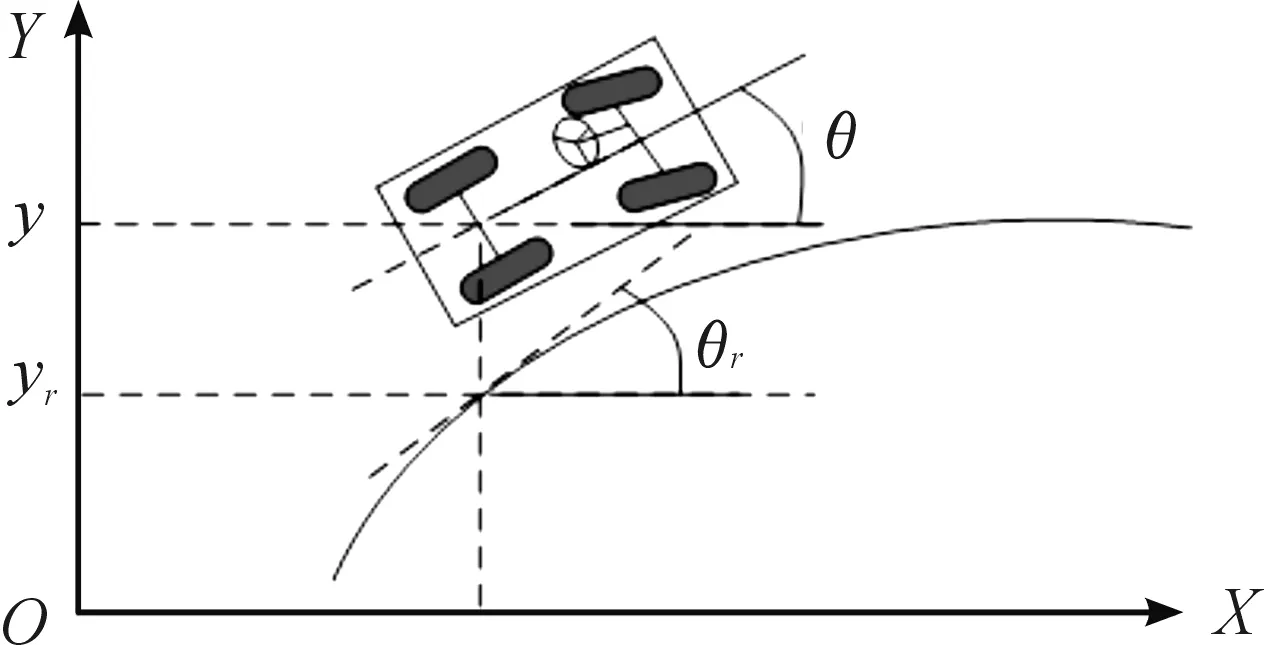
圖3 路徑跟蹤偏差
路徑跟蹤偏差方程為:
(3)
其中:ye為車輛在Y軸方向上的位置距離偏差;θe為航向角偏差。
由非時間參考量s=-z(t),非時間參考的路徑跟蹤偏差狀態方程為:
(4)
即:
(5)
式中ρr為目標路徑的曲率。
令:
其狀態方程為:
(6)
令φ控制律為:
(7)
其中常數k1>0,k2>0,k1、k2分別為智能汽車位置偏差反饋系數、航向角偏差反饋系數,得:
(8)

4 路徑跟蹤仿真及結果分析
4.1 聯合仿真模型搭建
本文運用Simulink與Carmaker進行聯合仿真實驗。Carmaker是一款成熟的參數化、面向總成特性的車輛動力學仿真軟件。相對于Carsim等仿真軟件,Carmaker具有以下幾個特點:① 整車模型模塊化更突出,更易進行模塊更替;② 道路模型搭建容易,具有多樣性;③ 擁有高精度的傳感器,環境參數可以被傳感器獲取并輸出;④ 可建立精確的動力學模型。
在Carmaker中建立道路模型和車輛模型,在Simulink中建立路徑跟蹤控制器模型,如圖4所示。車輛參數按照實際車輛參數設置,如表1所示。

圖4 Carmaker與Simulink聯合仿真
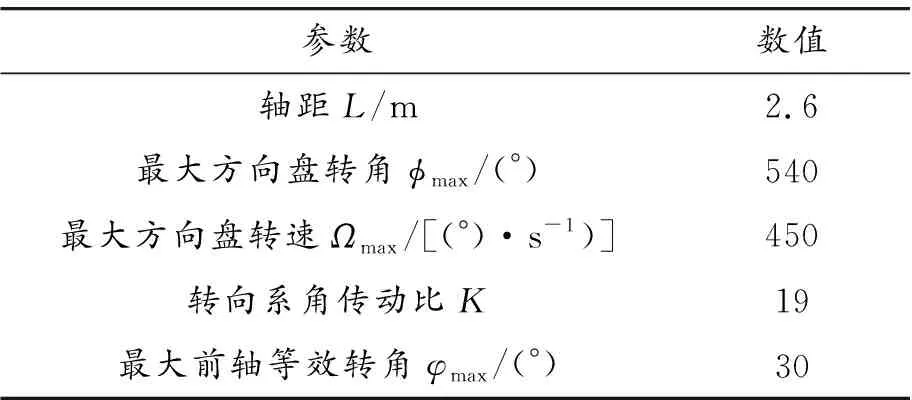
參數數值軸距L/m2.6最大方向盤轉角?max/(°)540最大方向盤轉速Ωmax/[(°)·s-1)]450轉向系角傳動比K19最大前軸等效轉角φmax/(°)30
地下停車場彎曲坡道一般根據螺旋線進行設計施工,因此本文采用某地下停車場雙圓筒螺旋坡道設計數據,在Carmaker中進行道路建模,如圖5所示。該螺旋坡道由內外2個圓筒組成,坡道坡度為9%,其內圓筒內壁半徑為6 m,外圓筒外壁半徑為14 m。螺旋坡道順時針下降,徑向無坡度[16]。
本文選擇螺旋坡道平面內某條螺旋線作為已知規劃的跟蹤路徑,如式(9)所示。根據經驗選取式(7)中的反饋系數k1=1.2,k2=0.8,智能汽車在地下停車場螺旋坡道低速自主行駛的期望速度為5 km/h,路徑跟蹤結果如圖6所示。
(9)

圖5 螺旋坡道三維示意圖
4.2 仿真結果分析
圖6是智能汽車在地下停車場彎曲坡道行駛路徑跟蹤的仿真結果。智能汽車在螺旋坡道自上而下低速行駛,以一條已規劃的螺旋線路徑為跟蹤對象,低速行駛的期望速度為5 km/h,車速由智能汽車ESP模塊控制。由圖6(a)可見,車速能較快地穩定在5 km/h,顯然,車速對位置偏差的影響可忽略。
路徑跟蹤控制器根據車輛實際位置與目標位置的偏差,由非時間參考控制律計算得出方向盤轉角。根據式(7),方向盤轉角由路徑曲率和位置誤差所決定。由圖6(b)可知:初始位置誤差較大,位置誤差在控制律中占較大比重,控制律輸出較大的轉角值。當位置誤差逐漸減小時,位置誤差在控制律中的占比逐漸減小,控制律輸出的轉角逐漸由路徑曲率控制。因此,方向盤轉角逐漸減小到符合路徑曲率的轉角值上。
由圖6(c)和圖6(d)可見:在非時間參考的控制律作用下,隨著方向盤轉角由最大減小到符合路徑曲率的轉角值上,Y軸偏差逐漸減小并趨于0,航向角偏差也逐漸減小,車輛的位置誤差逐漸減小并趨于0。由圖6(e)可知:除初始位置偏差控制外,智能汽車在螺旋坡道自上而下低速行駛的跟蹤路徑與目標路徑基本重合。
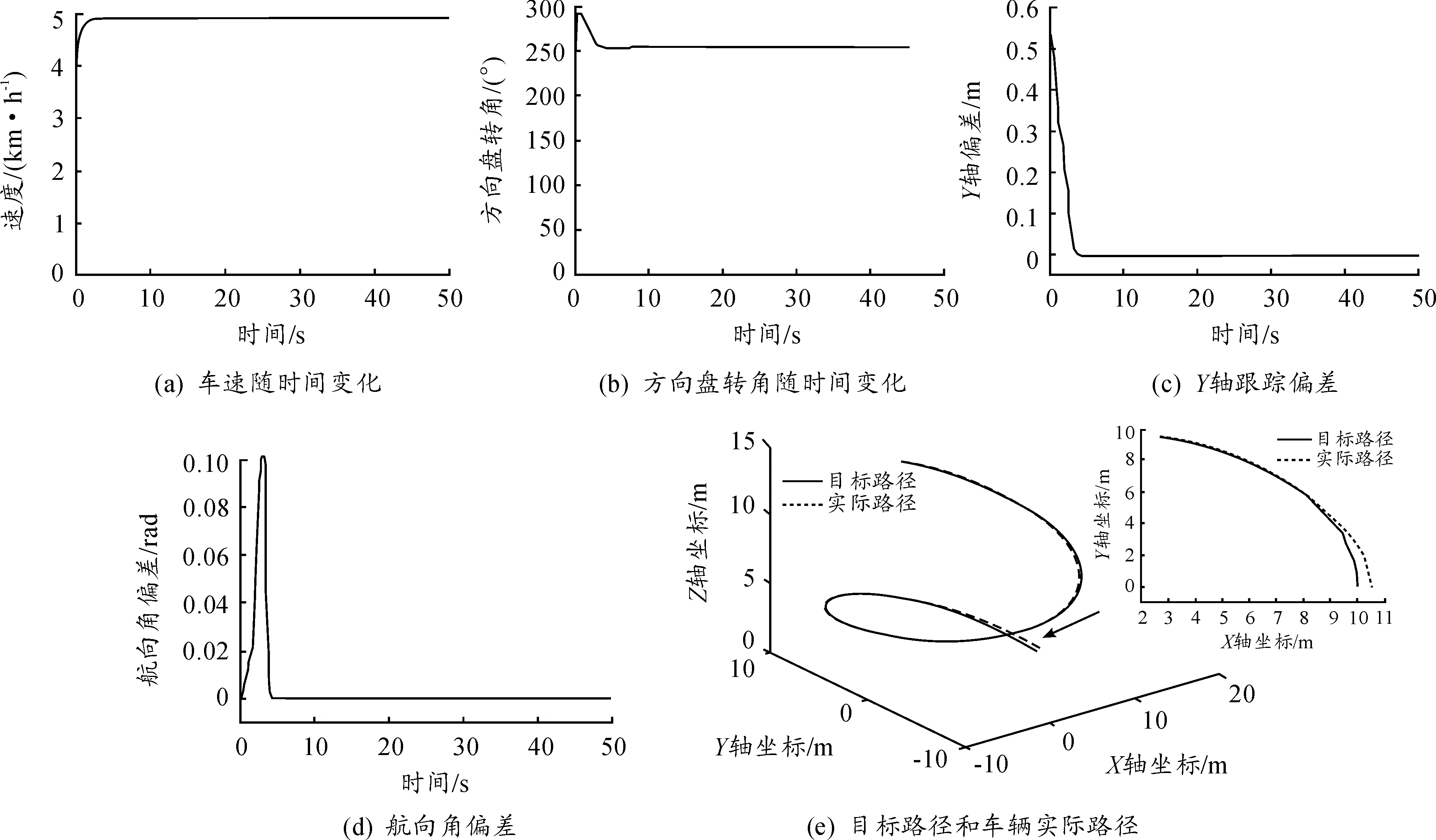
圖6 路徑跟蹤仿真結果
根據上述仿真結果,當螺旋彎曲坡道的路徑跟蹤存在初始偏差的情況下,采用非時間參考的路徑跟蹤控制律能保證系統誤差快速收斂趨近于0,并且方向盤角度抖動較小,具有較好的漸進穩定性。
5 結論
1) 提出了智能汽車非時間參考的螺旋彎曲坡道路徑跟蹤控制方法。智能汽車在低速泊車入庫過程中,自上而下的跟蹤路徑與目標路徑基本重合,位置偏差和航向角偏差趨于0。該方法以非時間參考量為因變量,降低了跟蹤控制系統對于汽車行駛軌跡精度的要求,具有較好的三維空間路徑跟蹤效果。
2) 針對在三維空間內位置跟蹤的三參數特點,提出以Z軸位置變量為非時間參考的因變量的路徑跟蹤控制方法,將三維空間位置跟蹤的3個參數轉化為二維平面位置跟蹤的2個參數,降低了路徑跟蹤控制器設計的復雜度。
3) 采用Carmaker與Simulink聯合仿真對路徑跟蹤控制策略進行驗證,Carmaker中車輛模型與實車存在一定差距,建立的道路模型與實際施工建設的地下停車場坡道也不完全一致,下一步的研究將在實際地下停車場彎曲坡道上進行實車路徑跟蹤控制策略驗證。同時將對地下停車場彎曲坡道內障礙物和墻壁的檢測、車輛定位方法以及狹小空間避撞控制方法進行研究,以實現智能汽車在地下停車場自主泊車入庫和出庫。
猜你喜歡
汽車與安全(2019年9期)2019-11-22 09:48:03
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
