無人機航拍林業蟲害圖像分割復合梯度分水嶺算法
2017-11-24 06:06:53張軍國馮文釗胡春鶴駱有慶
農業工程學報 2017年14期
關鍵詞:區域
張軍國,馮文釗,胡春鶴,駱有慶
(1. 北京林業大學工學院,北京 100083;2. 北京林業大學林學院,北京 100083)
·農業航空工程·
無人機航拍林業蟲害圖像分割復合梯度分水嶺算法
張軍國1,馮文釗1,胡春鶴1,駱有慶2※
(1. 北京林業大學工學院,北京 100083;2. 北京林業大學林學院,北京 100083)
針對林業信息監測方式實時性差、監測范圍有限等問題,為更加實時、準確地對林業蟲害信息進行監測并計算監測樣地中蟲害區域比例,該文在搭建面向林區蟲害監測的多旋翼無人飛行器航拍監測系統基礎上,提出了一種基于復合梯度分水嶺算法的圖像分割方法。該方法引入全局直方圖均衡化消除了圖像暗紋理的影響,并采用形態學混合開閉重構濾波完成了圖像樣本的去噪處理。計算灰度圖像各像素點的復合梯度實現了非相關區域(道路及裸地)的提取,最終利用分水嶺算法實現了監測圖像蟲害區域的分割提取。利用該文所提算法對8幅蟲害侵蝕程度不同的監測圖像進行分割,并與傳統分水嶺算法、K-means聚類算法進行對比試驗。試驗結果表明,該文算法蟲害區域提取的平均相對誤差率分別降低 6.56%、3.17%,平均相對極限測量精度分別改善 7.19%、2.41%,能夠相對準確地將蟲害區域從監測圖像中分割出來,可為后續林業蟲害監測與防護提供參考。
無人機;算法;監測;圖像分割;復合梯度
0 引 言
森林作為陸地生態系統的主體,是人類賴以生存及社會發展不可或缺的資源[1]。而林業蟲害對森林資源的危害非常嚴重,根據調查結果表明,平均每年發生林業蟲害面積有1 333萬hm2左右,約占中國林地總面積的6%[2]。因此林業蟲害防治形勢十分嚴峻,而科學有效地對林業蟲害信息進行監測則是解決這一問題的重要前提。目前,常用的林業蟲害監測方法主要為人工直接測量法[3]、引誘劑誘集法[4]、衛星遙感測量法[5]以及無線傳感器網絡監測法[6-7]。然而,現有監測方法仍存在一定的缺陷,人工直接測量法監測效率低、實時性差且存在安全隱患;引誘劑的誘集效果會受誘捕器懸掛高度和生態環境類型的影響;衛星遙感測量法不能精確測量局部微觀信息;無線傳感器網絡監測法只能進行地面監測,監測范圍有限。為了避免上述問題,利用小型化無人機作為監測載體的方法逐漸取得了學者們的廣泛關注[8-9]。其中,多旋翼無人飛行器作為一種低空遙感平臺,具有結構簡單、制造維護成本低、便于攜帶和易于操作等特點[10],可以實時、高效地低空采集林區植被圖像信息。
如何從圖像中有效地提取出健康林區與蟲害區域則是研究的關鍵[11]。目前圖像分割方法在林業蟲害監測領域的應用越來越廣[12],已有國內外學者提出了應用于林業蟲害監測領域的圖像分割方法。例如邊緣檢測[13-15]、聚類法[16-18]、基于分數演算的分水嶺算法[19]和基于顯著和模糊檢測的圖像分割方法[20]等。但是,由于蟲害監測圖像中非相關區域與病蟲害區域顏色相近,而目前現有的算法并沒有針對蟲害區域分割提取過程中圖像非相關區域的影響問題進行深入研究,同時大部分算法只針對地面圖像進行分析,不適用于多旋翼無人飛行器航拍圖像[21]。
基于以上情況,本文以遼寧省建平縣遭受油松毛蟲侵蝕的油松林為研究對象,搭建了面向林業蟲害監測的多旋翼無人飛行器圖像采集平臺,提出了一種基于復合梯度分水嶺算法的圖像分割方法,實現了林業蟲害監測圖像進行有效提取,解決了非相關區域對蟲害區域分割提取的影響問題以及圖像分割中存在的過分割現象。
1 林區蟲害監測飛行器平臺設計
本文采用自主設計的八旋翼飛行器執行林區蟲害監測圖像的監測任務。八旋翼飛行器采用 8個獨立電機驅動,相鄰電機旋轉方向相反,相對電機旋轉方向相同。由于電機旋轉導致的扭矩相互抵消,保證了飛行器扭矩平衡不會產生自旋[22]。飛行器通過控制 8個旋翼的轉速變化實現對飛行器6個自由度的控制。
1.1 坐標系定義
采用大地平面假設,建立相對于地球靜止的慣性坐標系和相對于飛行器本體的機體坐標系[23],具體如圖 1所示。其中機體坐標系X軸為飛行器前進與后退方向,軸向與電機M4和M8所在軸重合;Y與Z軸垂直;Z軸為垂直機體本身方向。采用歐拉角(俯仰角、橫滾角、偏航角)對飛行器姿態進行描述[24]。

圖1 八旋翼飛行器系統坐標系Fig.1 Eight rotor aircraft coordinate system
1.2 機載航電系統設計
本文設計的八旋翼飛行器機載航電系統包括如下 6個部分,即飛行控制器、慣性導航系統、數據傳輸系統、無刷電機調速器、供電系統以及信息采集系統,結構框圖及其實物圖如圖2、圖3所示。其中飛控計算機微處理器采用意法半導體公司 STM32F103RCT6芯片,具有精度高、速度快、硬件性能強以及接口資源豐富等優點。慣性導航系統采用 9軸數字運動處理器(digital motion processor,DMP)[25]MPU6050,相較于多組件方案,DMP免除了組合陀螺儀和加速器時之軸間差的問題。光學圖像采集設備使用松下GH3單反相機,其搭載在八旋翼飛行器的三軸云臺上,可以采集高清、穩定的林區低空航拍圖像。
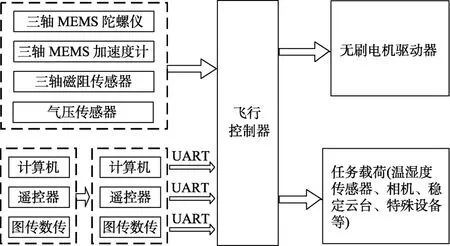
圖2 機載航電系統結構框圖Fig.2 Structure block diagram of airborne avionics system

圖3 八旋翼飛行器監測平臺實物圖Fig.3 Practicality image of eight rotor aircraft monitoring platform
1.3 姿態控制系統設計
飛行器采用串級PID(proportion integration differentiation)控制算法設計飛行器控制系統,實現姿態跟蹤控制。控制器外環為角度環,內環為角速度環。外環輸入量為飛行器歐拉角,給定角度由遙控器或串口控制終端設定,通過 PID控制器得到輸出量角速度,作為指令輸入到內環。內環根據輸入,利用PID控制器輸出電機控制信號,通過PWM信號發生器控制槳葉電機轉速,進而控制飛行器飛行姿態。系統控制結構如圖4所示。

圖4 串級PID控制框圖Fig.4 Diagram of cascade PID control
1.4 監測圖像采集
本文利用八旋翼飛行器針對遼寧省試驗林區進行實地圖像采集,該試驗林區主要受到松毛蟲和木蠹蛾的侵蝕,侵蝕后樹木表現為枯死現象,采集圖像及受災現象如圖 5所示。通過對采集圖像質量的綜合考慮,選取陰天多云天氣采集圖像。飛行器在監測區域中心起飛,垂直上升過程中飛行器每隔5 m懸停5 s采集圖像。圖像依靠機載單反相機(分辨率為4 608×2 592像素)以正攝圖像[25]采集方式得到,共采集30~100 m圖像451張(其中油松林167張、沙棘地148張、紅松72張、白樺64張),數據存儲大小為 2.58 G。綜合考慮圖像分割對采集圖像的像素要求,選取拍攝高度約為50 m的8張監測圖像。

圖5 遼寧省建平縣監測圖像效果圖Fig.5 Monitoring images effect in Jianping country,Liaoning province
2 基于復合梯度分水嶺算法的圖像分割方法
傳統的分水嶺圖像分割算法對噪聲比較敏感[26],在圖像受到復雜噪聲干擾及暗紋理影響時,分割結果無法滿足需求,甚至會產生嚴重的過分割現象。此外,蟲害區域的分割圖像中往往還存在大量的非相關區域,而傳統分水嶺算法對此缺乏處理能力。針對以上問題,本文提出一種基于復合梯度的分水嶺圖像分割算法對蟲害監測圖像進行處理。
算法關鍵步驟如下:1)對輸入圖像進行全局直方圖均衡化圖像增強處理并對其進行形態學混合開閉重構濾波;2)計算預處理后的灰度圖像的復合梯度提取梯度圖像;3)利用分水嶺變換對梯度圖像進行分割,對非林區區域進行提取;4)在原始圖像的基礎上去除非林區區域,進行灰度變換,計算灰度圖像的復合梯度提取梯度圖像;5)利用分水嶺變換對梯度圖像進行分割提取蟲害區域并進行區域合并。
2.1 圖像預處理
為了有效降低噪聲與暗紋理對分割圖像的影響,針對圖像噪聲,本文采用形態學混合開閉重構濾波[27-28],對圖像樣本進行處理。形態學混合開閉重構濾波在降低噪聲干擾的同時還可以保持圖像中剩余連續區域的邊緣,在后續分割時不會產生新的輪廓邊緣[29]。
針對圖像暗紋理,本文采用全局直方圖均衡化對圖像進行增強處理。具體處理過程如下:假設將圖像gzh(x,y)的灰度級r歸一化到區間[0,1],r=0時為黑色,r=1時為白色。gzh(x,y)灰度級范圍為[0,L-1],像素的總數為n,則有灰度級為rk的像素個數為nk。其全局直方圖均衡化對應的變換如式(1)所示。

式中Pr(rj)為gzh(x,y)的概率分布函數,Sk即為圖像gzh(x,y)的灰度級k從0取至(L-1)時,對圖像gzh(x,y)概率分布函數Pr(rj)求和,L為圖像灰度級總數。
對經過圖像增強的彩色圖像進一步進行灰度變換得到灰度圖像并對其進行開運算并對其結果進行閉運算(灰度圖像6a為參考圖像,結構元素選為正方形,尺寸為3×3像素),即可利用開閉重構得出濾波后的圖像。輸入圖像的灰度圖像、開操作圖像、閉操作圖像如圖6a、6b、6c所示。

圖6 濾波過程效果圖Fig.6 Result of filtering process
2.2 非相關區域提取
圖像中非相關區域(道路及裸地)的分割結果會對蟲害區域分割結果的提取產生干擾,使得分割結果不準確。為解決上述問題,本文先提取出非相關區域,再對蟲害區域進行分割處理。
首先對預處理后的灰度圖像進行復合梯度的求解。通過計算灰度圖像各像素點的復合梯度[30]得到梯度圖像,各像素點的復合梯度Cg的計算如式(2)所示。

式中水平復合梯度Hg和垂直復合梯度Vg分別通過微分模板計算即可得到,如矩陣(3)所示。
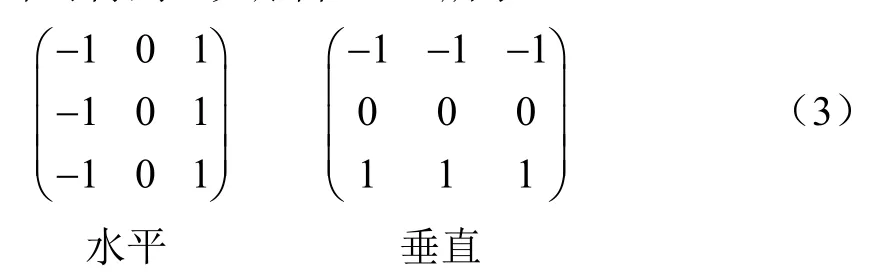
水平/垂直微分模板代表相對于像素點水平/垂直方向 0o與 180o、45o與 135o、-45o與-135o的鄰域像素點灰度值差值相加后取平均值。
統計各梯度層頻率,根據當前像素點的梯度信息將其放入排序數組中的合適位置,梯度值越低的像素點存放的位置越靠前,相同梯度值的點為一個梯度層。然后尋找圖像的極小區域 (此區域通過閾值判定) 并對其進行標記,區域的面積為區域中像素點的個數,本文選取的閾值為整幅圖像面積的1%。若同一梯度層相鄰像素點均已標記且標記相同,將 2個區域合并。去除所有小于特定像素數H(此處H設為20)的斑點污漬。最后進行分水嶺變換,提取出非相關區域圖像。
2.3 蟲害區域分割提取
由于非相關區域對蟲害區域提取的影響,本文采用在輸入圖像的基礎上去除非相關區域,所的圖像作為蟲害區域分割提取的輸入圖像。通過對三原色 RGB(red,green, blue)、色彩模型Lab(L代表亮度Luminosity, 通道a正值為紅色,負值為綠色;通道b正值為黃色,負值為藍色)、顏色模型HSL(hue, saturation, lightness)和灰度圖像顏色空間效果的比較,采用更能直接反映圖像特征的L變量(亮度信息),也就是灰度圖像作為顏色轉換空間。通過計算灰度圖像的各像素點的復合梯度,進而提取梯度圖像。采用分水嶺變換對梯度圖像進行分割,實現蟲害區域的分割提取。
2.4 區域合并
基于復合梯度的分水嶺變換所得的蟲害提取圖像可能仍存在過分割現象,本文采用對分割后的圖像進行區域合并。
首先定義區域Ci和Cj的綜合距離度量ijD如公式(4)所示。

式中ui為區域Ci的顏色均值向量,uj為區域Cj的顏色均值向量,σi為區域Ci內 3個通道顏色均方差的均值,σj為區域Cj內 3個通道顏色均方差的均值,Eij為區域Ci和Cj公共邊緣歸一化均值,E為所有邊緣歸一化均值。其中若Ci和Cj存在鄰接關系,且Ci和Cj的綜合距離度量Dij小于閾值參數T,則合并Ci和Cj;若所有存在鄰接關系的區域綜合距離度量均大于T,則合并結束。
2.5 蟲害監測圖像分割效果
以油松林為例,利用本文方法對監測圖像進行蟲害區域分割提取的效果圖如圖7所示,其中對輸入圖像7a進行圖像預處理,得到濾波圖像7b和增強圖像7c;基于復合梯度實現非相關區域圖像7d的提取,如圖中白色區域所示;在圖像7a的基礎上去除非相關區域圖像7d并將其轉化為灰度圖像 7e,初步顯現出蟲害區域范圍;計算灰度圖像7e的復合梯度得到梯度圖像7f,使得蟲害區域更加明顯;利用分水嶺變換對圖像7f進行分割得到蟲害區域,如圖7g所示;最后將非相關區域圖像7d與蟲害區域提取圖像7g進行區域合并得到最終分割效果,如圖7h所示。

圖7 蟲害監測圖像分割效果圖Fig.7 Segmentation effect of pest monitoring image
3 試驗結果與分析
3.1 不同算法對蟲害監測圖像分割效果
本文選取蟲害侵蝕程度不同的監測圖像作為測試樣本,侵蝕程度如圖 8中不同圖像樹木枯死面積所示。將本文提出的復合梯度分水嶺算法與傳統分水嶺算法、K-means聚類分割算法的蟲害區域分割的提取效果進行了比較,結果如圖 8所示。其中傳統分水嶺算法在分水嶺變換的基礎上采用形態學混合開閉重構濾波對分割圖像進行去噪;聚類分割算法采用K-means聚類算法,參數K設定為20。本文借助圖像拆分器通過手動操作方法標注出蟲害位置,計算蟲害區域比例作為參照真值。
上述 8組試驗結果表明,傳統分水嶺算法得到的蟲害區域明顯大于真實情況,錯誤率較高,同時K-means聚類分割算法能夠有效提取出蟲害區域,但會摻雜非相關區域造成誤報。而本文算法得到的結果與人工篩選結果近似,能夠有效地提取出蟲害區域與非林區區域,從而計算出健康區域、蟲害區域、非相關區域在整幅圖像中的占比。
3.2 算法性能評價與分析
為了驗證本文算法的有效性,采用相對誤差率和相對極限測量精度等作為評價指標[31]。相對誤差率ξ用于描述分割目標和背景之間的誤分辨率。

式中Ni為分割處理后區域i的實際像素點數;Ni*為區域i實際目標像素點數;N為一幅圖像實際像素點數;c為區域分割所得的總區域數。相對誤差率的高低可以表征分割結果的好壞。

圖8 蟲害監測圖像分割效果對比圖Fig.8 Segmentation effect comparison of pest monitoring image
相對極限測量精度σ用于表示目標區域相對參照真值的偏離程度,表征圖像分割性能。

式中w為原圖像中待分割區域實際像素點數,即為參照真值;wm為采用分割算法分割后所得目標區域像素點數。σ的值越小,分割性能越好。
針對前面所述的 8幅蟲害監測圖像樣本,參照真值采用借助圖像拆分器人工標注所計算出的蟲害比例。本文算法與傳統分水嶺算法、K-means聚類算法分割結果的相對誤差率及相對測量精度結果如表1所示。

表1 相對誤差率與相對極限測量精度測試結果Table 1 Results of relative error rate and relative ultimate measurement accuracy%
通過對以上試驗數據的分析,采用傳統分水嶺算法的平均相對誤差率為 8.19%,平均相對極限測量精度為8.50%;K-means聚類算法的平均相對誤差率為4.80%,平均相對測量精度為3.72%。而采用本文算法的平均相對誤差率為1.63%,平均相對測量精度為1.31%。試驗結果表明,本文算法對監測圖像蟲害區域分割提取結果優于傳統分水嶺算法、K-means聚類分割算法,其中相對誤差率平均降低 6.56%和 3.17%,相對極限測量精度平均改善7.19%和2.41%。
4 結 論
本文在搭建面向林區蟲害監測的多旋翼無人飛行器航拍監測系統的基礎上,實現了對林區蟲害信息實時、高效采集。針對林業航拍監測圖像,提出了一種基于復合梯度分水嶺算法的多旋翼無人飛行器林業蟲害監測圖像的分割方法。利用本文所提算法對遼寧省試驗林區實地采集到的蟲害監測圖像進行處理,并從分割效果、相對誤差率及相對極限測量精度 3個方面與傳統分水嶺算法、K-means聚類算法進行比較。試驗結果表明,本文算法對監測圖像蟲害區域分割提取結果優于傳統分水嶺算法、K-means聚類分割算法,其中相對誤差率平均降低6.56%和3.17%,相對極限測量精度平均改善7.19%和2.41%。
[1] 趙鐵良,董振輝,于治軍,等. 中國森林病蟲指數的研究[J]. 林業科學,2003,39(3):172-176.Zhao Tieliang, Dong Zhenhui, Yu Zhijun.Study on establishment of forest pest indexes[J]. Scientia Silvae Sinicae, 2003,39(3):172-176. (in Chinese with English abstract)
[2] 凌天淅,侯輝,周桃龍. 淅川森林病蟲害防治[J]. 中國林業,2010,19:49-49.Ling Tianxi, Hou Hui, Zhou Taolong. Prevention and control of forest diseases and pests in Xi Chuan[J]. Forestry of China,2010, 19: 49-49. (in Chinese with English abstract)
[3] 新疆維吾爾自治區林業有害生物防治檢疫局. 林業有害生物防治[M]. 北京:中國林業出版社,2010:23-76.
[4] 袁菲,駱有慶,石娟,等. 不同含量引誘劑對落葉松八齒小蠹及其天敵紅胸郭公蟲的引誘[J]. 林業科學,2012,48(6):89-94.Yuan Fei, Luo Youqing, Shi Juan, et al. Different attractive effects and eag responses of ips subelongatus(coleoptera,scolytidae) and its predator thanasimus substriatus (coleoptera:cleridae) to ipslures[J]. Scientia Silvae Sinicae, 2012, 48(6):89-94. (in English with Chinese abstract)
[5] Leila G, Pir B M, Jamil A, et al. Monitoring infestations of oak forests by tortrix viridana (Lepidoptera: Tortricidae)using remote sensing[J]. Plant Protection Science, 2016,52(4): 270-276. (in Chinese with English abstract)
[6] 齊建東,蔣禧,趙燕東. 基于無線多媒體傳感器網絡的森林病蟲害監測系統[J]. 北京林業大學學報,2010,32(4):186-190.Qi Jiandong, Jiang Xi, Zhao Yandong. A forest pest and disease monitoring system based on wireless multimedia sensor network[J]. Journal of Beijing Forestry University,2010, 32(4): 186-190. (in Chinese with English abstract)
[7] 王艷. 基于物聯網的森林病蟲害防治智能傳感系統研究[D]. 南京:南京林業大學,2012.Wang Yan. Research of Intelligent Sensor System for Forest Pest Control based on the Internet of Things[D]. Nanjing:Nanjing Forestry University, 2012. (in Chinese with English abstract)
[8] 費運巧,劉文萍,駱有慶,等. 森林病蟲害監測中的無人機圖像分割算法比較[J]. 計算機工程與應用,2017,53(8):216-223.Fei Yunqiao, Liu Wenping, Luo Youqing, et al. Comparison of algorithms for unmanned aerial vehicle image segmentation in monitoring forest diseases and insect pests[J]. Computer Engineering and Applications, 2017, 53(8): 216-223. (in Chinese with English abstract)
[9] Sankarasrinivasan S, Balasubramanian E, Karthik K, et al.Health monitoring of civil structures with integrated UAV and image processing system[J]. Procedia Computer Science,2015, 54: 508-515.
[10] Luck B. Unmanned aerial vehicles (UAVs) in pest management:Progress in the development of a UAV-deployed mating disruption system for Wisconsin cranberries[J]. Nucleosides Nucleotides & Nucleic Acids, 2008, 27(5): 449-459.
[11] 刁智華,王歡,宋寅卯,等. 復雜背景下棉花病葉害螨圖像分割方法[J]. 農業工程學報,2013,29(5):147-152.Diao Zhihua, Wang Huan, Song Yinmao, et al. Segmentation method for cotton mite disease image under complex background[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013,29(5): 147-152. (in Chinese with English abstract)
[12] Liu C, Liu W, Xing W. An improved edge-based level set method combining local regional fitting information for noisy image segmentation[J]. Signal Processing, 2017, 130: 12-21.
[13] 張靜,王雙喜. 溫室植物病害圖像處理技術中圖像分割方法的研究[J]. 內蒙古農業大學學報,2007,28(3):19-22.Zhang Jing, Wang Shuangxi. A study on the segmentation method in image processing for plant disease of green house[J]. Journal of Inner Mongolia Agricultural University,2007, 28(3): 19-22. (in Chinese with English abstract)
[14] 姜濱,曹軍,崔莉. 基于小波多尺度的林業害蟲圖像邊緣檢測[J]. 森林工程,2013,29(4):14-17.Jiang Bin, Cao Jun, Cui Li. Image edge detection for forest pests based on wavelet milti-scale transform[J]. Forest Engineering, 2013, 29(4): 14-17. (in Chinese with English abstract)
[15] 宋蟄存,周秀明. 微分算子在蟲害楊樹葉片邊緣檢測的應用[J]. 林業機械與木工設備,2007,35(2):47-49.Song Zhecun, Zhou Xiuming. Application of different operators in edge detection of pest poplar blades[J]. Forestry Machinery and Woodworking Equipment, 2007, 35(2): 47-49. (in Chinese with English abstract)
[16] 李冠林,馬占鴻,黃沖,等. 基于K-means硬聚類算法的葡萄病害彩色圖像分割方法[J]. 農業工程學報,2010,26(14):32-37.Li Guanlin, Ma Zhanhong, Huang Chong, et al. Segmentation of color images of grape diseases usingK-means clustering algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(14): 32-37. (in Chinese with English abstract)
[17] Faithpraise F, Birch P, Young R, et al. Automatic plant pest detection and recognition using k-means clustering algorithm and correspondence filters[J]. International Journal of Advanced Biotechnology & Research, 2013, 4(2): 189-199.
[18] Bouyer A, Jalali M, Bouyer A, et al. Developing a rule-based data clustering algorithm for diagnosing of wheat pest[J].Global Journal on Technology, 2013, 3: 1549-1555.
[19] Liu W. A marker-based watershed algorithm using fractional calculus for unmanned aerial vehicle image segmentation[J].Journal of Information & Computational Science, 2015,12(14): 5327-5338.
[20] 陳雷,袁媛,吳娜,等. 基于顯著和模糊檢測的淺景深作物病害圖像分割[J]. 農業工程學報,2015,31(增刊 2):145-151.Chen Lei, Yuan Yuan, Wu Na, et al. Segmentation for low depth of field crop disease images based on saliency and blurred detection[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(Supp.2): 145-151. (in Chinese with English abstract)
[21] Merabet Y, Meurie C, Ruichek Y, et al. Building roof segmentation from aerial images using a lineand region-based watershed segmentation technique[J]. Sensors, 2015, 15(2):3172-3203.
[22] Salazar S, Romero H, Lozano R, et al. Modeling and realtime stabilization of an aircraft having eight rotors[J]. Journal of Intelligent & Robotic Systems, 2009, 54(1): 455-470.
[23] 趙世榮,孫運強,石喜玲. 基于信息融合的八旋翼飛行器狀態解算[J]. 彈箭與制導學報,2016,36(2):167-170.Zhao Shirong, Sun Yunqiang, Shi Xiling. Attitude estimation of octorotor aircraft based on information fusion[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2016, 36(2):167-170. (in Chinese with English abstract)
[24] 常彥春. 多旋翼無人飛行器自主飛行控制系統設計研究[D]. 北京:北京理工大學,2016.Chang Yanchun. Research on the Autonomous Flight Control System of Muti-rotor Aricraft[D]. Beijing: Beijing Institute of Technology, 2016. (in Chinese with English abstract)
[25] Michael N, Mellinger D, Lindsey Q, et al. The grasp multiple micro-uav testbed[J]. Robotics & Automation Magazine,IEEE, 2010, 17(3): 56-65.
[26] Franchi G, Angulo J. Bagging stochastic watershed on natural color image segmentation[J]. Lecture Notes in Computer Science, 2015, 9082: 422-433.
[27] 江怡,梅小明,鄧敏,等. 一種結合形態濾波和標記分水嶺變換的遙感圖像分割方法[J]. 地理與地理信息科學,2013,29(2):17-21.Jiang Yi, Mei Xiaoming, Deng Min, et al. Segmentation of remote sensing imagery combined with morphological filtering and marked watershed transformation[J]. Geography and Geo-Information Science, 2013, 29(2): 17-21. (in Chinese with English abstract)
[28] 夏平,劉馨瓊,向學軍,等. 復合形態濾波和改進型分水嶺算法的圖像分割[J]. 三峽大學學報自然科學版,2008,30(5):60-63.Xia Ping, Liu Xinqiong, Xiang Xuejun, et al. Image segmentation based on compound morphology filter and modiffied watershed algorithm[J]. Journal of China Three Gorges University: Natural Sciences, 2008, 30(5): 60-63. (in Chinese with English abstract)
[29] 楊信廷,孫文娟,李明,等. 基于K均值聚類和開閉交替濾波的黃瓜葉片水滴熒光圖像分割[J]. 農業工程學報,2016,32(17):136-143.Yang Xinting, Sun Wenjuan, Li Ming, et al. Water droplets fluorescence image segmentation of cucumber leaves based onK-means clustering with opening and closing alternately filtering[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 136-143. (in Chinese with English abstract)
[30] 江霞. 基于復合梯度分水嶺算法的彩色白血細胞分割[D].長沙:中南林業科技大學,2012.Jiang Xia. Color Leukocyte Image Segmentation based on Composite Gradient Watershed Algorithm[D]. Changsha:Central South University of Forestry and Technology, 2012.(in Chinese with English abstract)
[31] Mesascarrascosa F J, Rumbao I C, Berrocal J A, et al.Positional quality assessment of orthophotos obtained from sensors onboard multi-rotor UAV platforms[J]. Sensors, 2014,14(12): 22394-22407.
Image segmentation method for forestry unmanned aerial vehicle pest monitoring based on composite gradient watershed algorithm
Zhang Junguo1, Feng Wenzhao1, Hu Chunhe1, Luo Youqing2※
(1. School of Technology, Beijing Forestry University, Beijing100083,China;2.School of Forestry, Beijing Forestry University, Beijing100083,China)
The application of multi-rotor unmanned aerial vehicle monitoring system for forest pest information collecting has many advantages, such as low running cost, operating flexibility, easy access to data, high image resolution etc. It has been regarded as a quick access to forest insect pest information collecting. By use of unmanned aerial vehicle system, valid segmentation and extraction of pest images acquired with the help of multi-rotor unmanned aerial vehicle can be used to calculate the insect pest proportion in monitored sample field. It can provide forest conservation experts with evidence for assessing the insect pest damage. To conduct forest monitoring work and calculate the proportion of pest infested area in monitored sample field with more preciseness and fast turnaround, in this paper, we aimed to solve poor time response circle and limited monitoring range problems that exist in current forestry information monitoring method. Firstly, in this paper, we built both hardware and software systems of multi-rotor unmanned aerial vehicle. Aerial vehicle equipped with image collecting devices was used to monitor in forestry pest insect infested area and collect data in the Liaoning testing forest. In order to obtain proper resolution images, aerial vehicle took off the center of the chosen monitoring area vertically to collect photo resources. By considering needed resolution requirements on image segmentation comprehensively, the height of about 50 m was chosen for image acquisition. On the analytical basis of monitoring images, an image segmentation method based on composite gradient watershed algorithm was proposed. This method introduced global histogram equalization to eliminate the influence of dark texture and adopted the morphological hybrid open-closing reconstruction filter to complete the denoising work of the image samples, eliminate the image interference to the segmentation effect, and suppress the over-segmentation phenomenon in image segmentation process. The gray-scale image was obtained by gray-scale transformation of the pre-processed image. The non-correlation regions (road and bare ground) were extracted by calculating the composite gradient of each pixel point in the gray image. Interference to the segmentation result may arise in segmenting process due to the similar color of non-correlation region and pest insect infested area. In this paper, the mentioned region was removed from the original image, which greatly avoided the interference of the non-related region to the pest area and ensured the accuracy of the result. Finally, the watershed algorithm was applied to realize the segmentation and extraction of insect pest area in images. In order to verify the effectiveness of the proposed method, the traditional watershed algorithm and K-means clustering algorithm were used for comparing experiment methods in the segmentation of eight images with different levels of insect pest. With the help of mage segmentation device, the accurate pest insect infested area was labeled manually, and it was taken as reference value in pest insect proportion calculating step. The experiment result showed that the segmentation effect was much more similar to the manual operation result. Specifically, the relative error rate decreased by 6.56% and 3.17% and the relative limit measuring accuracy was improved by 7.19% and 2.41% in this proposed method when traditional watershed algorithm was compared withK-means cluster algorithm. Our result showed that multi-rotor unmanned aerial vehicle was helpful in real time and effective monitoring of forest pest insect. The algorithm proposed in this paper was able to accurately segment and extract pest insect area in monitoring images and the proportion of pest area in whole sample fields was acquired, thus providing valid data support for forest pest monitoring and preventing work in the future.
unmanned aerial vehicles; algorithms; monitoring; image segmentation; composite gradient
10.11975/j.issn.1002-6819.2017.14.013
TP391.4; S126
A
1002-6819(2017)-14-0093-07
張軍國,馮文釗,胡春鶴,駱有慶. 無人機航拍林業蟲害圖像分割復合梯度分水嶺算法[J]. 農業工程學報,2017,33(14):93-99.
10.11975/j.issn.1002-6819.2017.14.013 http://www.tcsae.org
Zhang Junguo, Feng Wenzhao, Hu Chunhe, Luo Youqing. Image segmentation method for forestry unmanned aerial vehicle pest monitoring based on composite gradient watershed algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(14): 93-99. (in Chinese with English abstract)
doi:10.11975/j.issn.1002-6819.2017.14.013 http://www.tcsae.org
2017-03-12
2017-05-15
林業公益性行業科研專項資助(201404401);國家自然科學基金項目資助(31670553);中央高校基本科研業務費專項資金資助(2016ZCQ08)
張軍國,教授,博士生導師,主要從事圖像處理與人工智能研究。北京 北京林業大學工學院,100083。Email:zhangjunguo@bjfu.edu.cn
※通信作者:駱有慶,教授,博士生導師,主要從事森林有害生物可持續控制研究。北京 北京林業大學林學院,100083。Email:yqluo@bjfu.edu.cn
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15