分布式火箭炮控制系統(tǒng)研究*
2017-11-09 06:21:17張建新
彈箭與制導(dǎo)學(xué)報(bào) 2017年2期
張建新
(湖北江山重工有限責(zé)任公司,湖北襄陽 441057)
分布式火箭炮控制系統(tǒng)研究*
張建新
(湖北江山重工有限責(zé)任公司,湖北襄陽 441057)
火箭炮自動(dòng)化程度越來越高,其控制系統(tǒng)越來越復(fù)雜。為了降低單體復(fù)雜性,提高系統(tǒng)配置的靈活性,提高模塊化水平,從而有效提升產(chǎn)品的可靠性、維修性、測試性,設(shè)計(jì)了分布式火箭炮控制系統(tǒng)。文中采用自頂向下的原理和系統(tǒng)工程方法,對分布式系統(tǒng)的目標(biāo)功能、體系架構(gòu)、消息機(jī)制進(jìn)行了研究。針對火箭炮的特點(diǎn),擬定了通信協(xié)議,提出了分布式節(jié)點(diǎn)設(shè)計(jì)思路。經(jīng)過研制分布式節(jié)點(diǎn)和系統(tǒng)試驗(yàn),表明該設(shè)計(jì)能夠滿足需求,運(yùn)行可靠。
火箭炮;CAN總線;MilCAN;控制系統(tǒng);分布式控制
0 引言
基于總線的控制系統(tǒng)發(fā)展很快,特別在武器裝備中的應(yīng)用很多。基于CAN總線的MilCAN高層協(xié)議,已經(jīng)應(yīng)用在裝甲車配電系統(tǒng)中[1]。關(guān)于MilCAN性能分析的消息及其機(jī)制、總線同步和配置[2-3]的研究已經(jīng)成熟。在分布式控制網(wǎng)絡(luò)中,基于CAN網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)及應(yīng)用協(xié)議也成為主流技術(shù)[4]。基于MilCAN總線的總線主控節(jié)點(diǎn)設(shè)計(jì)方案[5]以及分布式控制系統(tǒng)應(yīng)用[6]都成功應(yīng)用于型號。
火箭炮控制系統(tǒng)是火箭炮的有機(jī)組成部分,是實(shí)現(xiàn)火箭炮的供配電、電氣控制、火力控制、安全聯(lián)鎖等功能的電子信息系統(tǒng)。一直以來,火箭炮控制系統(tǒng)存在單體結(jié)構(gòu)復(fù)雜,系統(tǒng)可靠性不高,維修檢測不方便,系統(tǒng)電磁兼容性不好等問題。為此,設(shè)計(jì)一種分布式控制系統(tǒng),以滿足火箭炮發(fā)展需要。
1 CAN總線介紹
1.1 CAN總線
CAN總線是一種多主串行數(shù)據(jù)通信總線,通信速率可達(dá)1 Mbit/s,通信功能均由CAN控制器管理與執(zhí)行。CAN總線數(shù)據(jù)以報(bào)文為單位傳送,按報(bào)文標(biāo)識符設(shè)置的優(yōu)先級進(jìn)行數(shù)據(jù)交換。
CAN接口協(xié)議已經(jīng)發(fā)展到2.0B。該協(xié)議為擴(kuò)展模式,采用雙驗(yàn)收濾波器機(jī)制。通訊協(xié)議兼容點(diǎn)對點(diǎn)、一對多及廣播通訊模式。在總線中傳送的報(bào)文,如表1所示。CAN2.0B擴(kuò)展幀報(bào)文格式如圖1所示,每幀由13 B組成,標(biāo)識符(ID)長度為29 bit,數(shù)據(jù)64 bit。報(bào)文幀頭中,幀格式IDE為1,表示擴(kuò)展幀;幀類型RTR為0,表示數(shù)據(jù)幀;保留位R1,R0默認(rèn)為0;數(shù)據(jù)長度代碼DLC表示使用的數(shù)據(jù)字節(jié)數(shù),如0010表示數(shù)據(jù)幀信息包含數(shù)據(jù)字節(jié)為2個(gè)。
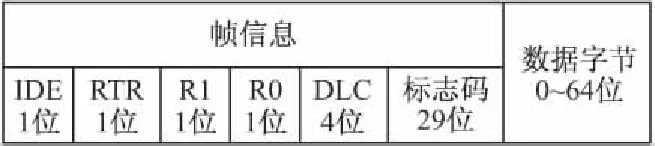
圖1 CAN2.0B擴(kuò)展協(xié)議幀報(bào)文信息
應(yīng)用CAN協(xié)議需要對29 bit標(biāo)識符重新定義,即形成應(yīng)用層通信協(xié)議。
1.2 MilCAN總線
由于CAN協(xié)議采用多主結(jié)構(gòu),即無主控端,任何節(jié)點(diǎn)可在總線空閑時(shí)主動(dòng)向總線發(fā)送消息,雖然有總線仲裁與調(diào)度,但客觀上造成了消息無確定響應(yīng)時(shí)間,特殊情況下不能滿足實(shí)時(shí)性要求。為此,便產(chǎn)生了MilCAN協(xié)議,它采用主從結(jié)構(gòu),但主控端只是起同步作用,不參與觸發(fā)和控制消息,這樣保證了每個(gè)消息有確定的響應(yīng)時(shí)間,系統(tǒng)實(shí)時(shí)性好。當(dāng)主控端退出工作后,其余節(jié)點(diǎn)可通過“選舉”成為主控端,從而保證系統(tǒng)的可靠性。
MilCAN總線在CAN2.0B基礎(chǔ)上,進(jìn)行協(xié)議改進(jìn),主要是對29 bit標(biāo)志符的重新定義,它們的定義如圖2所示。MilCAN協(xié)議是基于SAE1939的ID格式,兩種格式可以用于同一總線(如MilCAN選擇250 Kbit/s),用第25位區(qū)分不同協(xié)議[1]。

圖2 MilCAN標(biāo)志符格式
對ID格式說明如下:
源地址域。第0位到第7位為發(fā)送節(jié)點(diǎn)唯一的源地址,保證了能夠識別信息的發(fā)送方。
消息主類型、消息子類型。第16位到第23位為消息主類型域,第8位到第5位為消息子類型域。
請求位。第24位表示幀是請求消息(1),還是狀態(tài)/命令消息(0)。
協(xié)議類型位。第25位表示消息是MilCAN消息(1),還是SAEJ1939消息(0)。
優(yōu)先級。第26位到第28位為消息的優(yōu)先級。
2 系統(tǒng)體系架構(gòu)
2.1 目標(biāo)
系統(tǒng)將能夠?qū)崿F(xiàn)共享資源、綜合利用系統(tǒng)信息、系統(tǒng)集成與控制數(shù)字化、關(guān)鍵功能降級、硬件模塊化、通過軟件實(shí)現(xiàn)系統(tǒng)功能的重構(gòu)、嵌入故障診斷和綜合檢測功能。同時(shí),能夠靈活配置,方便升級和提升檢測維修水平,降低硬件的復(fù)雜性,系統(tǒng)的各個(gè)執(zhí)行功能信息不應(yīng)駐留在一個(gè)任務(wù)處理部件之中,而是以分別執(zhí)行的方式分布在它們之間,這就是采用分布式控制工作模式的思想和目標(biāo),如圖3所示。
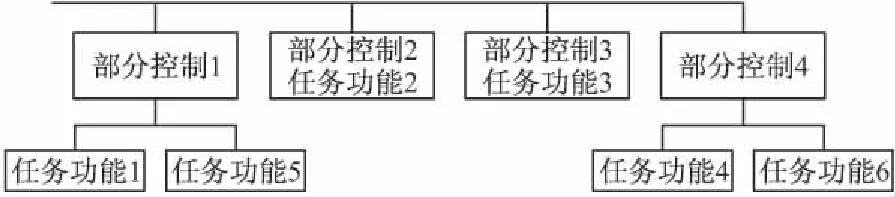
圖3 分布式控制邏輯
2.2 系統(tǒng)功能
根據(jù)當(dāng)今火箭炮的主流作戰(zhàn)使用要求和技術(shù)發(fā)展,系統(tǒng)功能將定位于:
1)能夠完成系統(tǒng)使用操作、信息傳輸操作及顯控功能;
2)能夠使系統(tǒng)各傳感器和單體設(shè)備的信息數(shù)字化,方便通過軟件實(shí)現(xiàn)信息融合和處理;
3)能夠接收指揮信息和發(fā)送狀態(tài)信息,并通過軟件完成信息處理;
4)能夠安全可靠的實(shí)現(xiàn)信息裝定和發(fā)火等火力控制任務(wù),互鎖檢測和發(fā)火功能;
5)能夠安全可靠的實(shí)現(xiàn)調(diào)炮等操瞄控制功能,系統(tǒng)分布式監(jiān)控操瞄狀態(tài)信息;
6)能夠在各項(xiàng)功能執(zhí)行過程中起到安全聯(lián)鎖控制功能,防止功能交疊,保護(hù)人員和設(shè)備安全;
7)能夠嵌入在線監(jiān)測軟件,實(shí)現(xiàn)在線監(jiān)測和故障診斷功能;
8)能夠?qū)崿F(xiàn)系統(tǒng)供配電管理功能,有序安全的為設(shè)備分配電源。
2.3 系統(tǒng)結(jié)構(gòu)
根據(jù)設(shè)定的目標(biāo)和系統(tǒng)執(zhí)行功能任務(wù),按照分布式邏輯思想指導(dǎo),規(guī)劃出具體的子功能系統(tǒng),主要包括:操作控制終端、指揮子系統(tǒng)、發(fā)控子系統(tǒng)、操瞄子系統(tǒng)、聯(lián)鎖控制子系統(tǒng)、定位導(dǎo)航子系統(tǒng)、電源子系統(tǒng)等。設(shè)計(jì)的系統(tǒng)體系結(jié)構(gòu)如圖4所示。
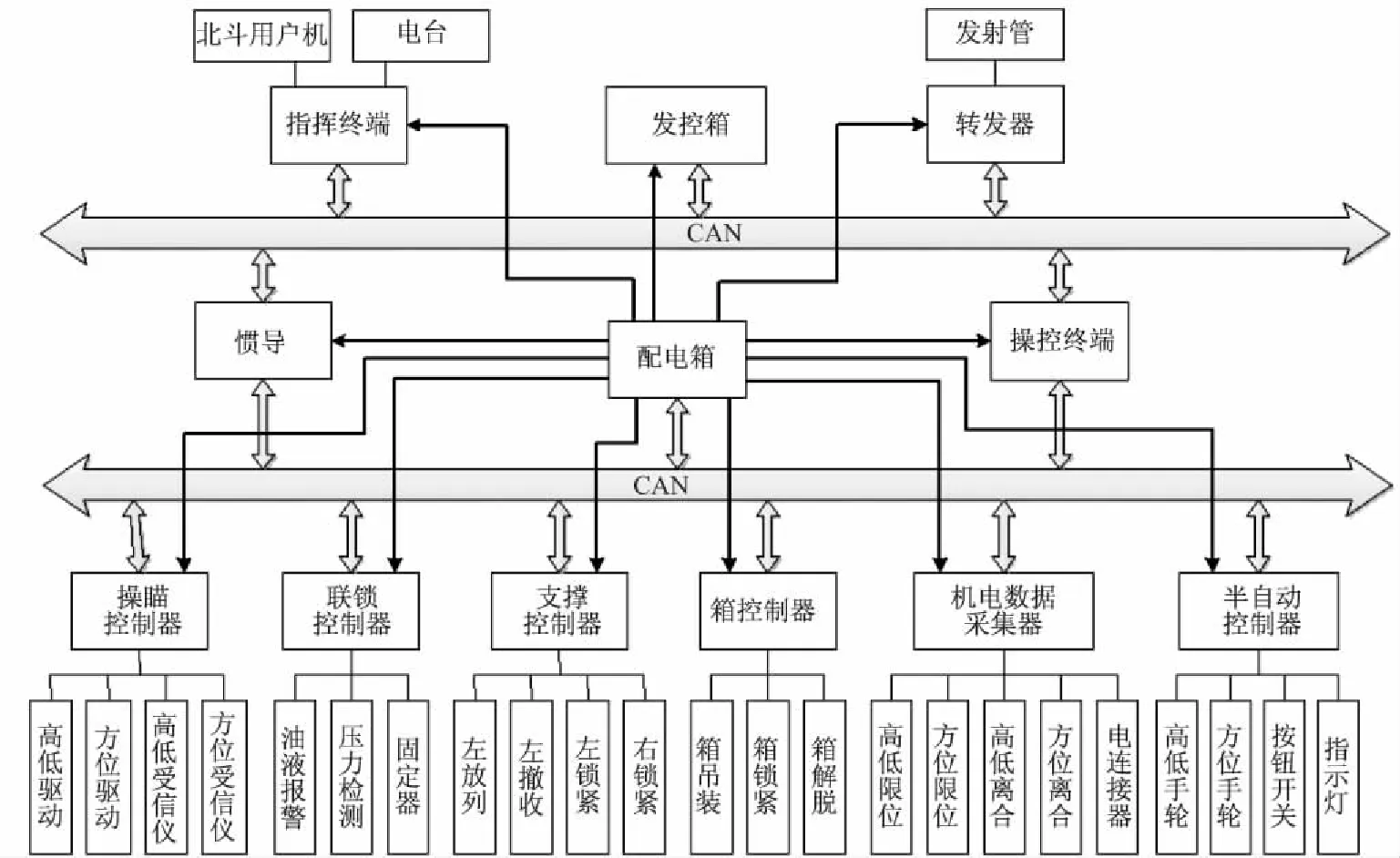
圖4 系統(tǒng)體系架構(gòu)
該分布式系統(tǒng)依賴于兩條CAN總線,這兩條CAN總線貫穿于炮車,其中一條是發(fā)控總線,一條是電氣控制總線,兩條總線信息之間通過操控終端交互。
3 消息機(jī)制與協(xié)議
3.1 消息類型
1)命令消息:命令消息是系統(tǒng)正常工作時(shí)的主要消息類型,可以是周期或者是事件觸發(fā)的。
2)請求消息:請求消息用于請求特定的消息類型的發(fā)送,請求位(第24位)應(yīng)置1,不能包含任何數(shù)據(jù)位。
3)請求響應(yīng)消息:節(jié)點(diǎn)接收到請求信息后作出的響應(yīng),包括相應(yīng)消息主類型、消息子類型,并將請求位值置0。
4)非操作消息:使用消息主類型值0x31;子類型表示目的節(jié)點(diǎn)的地址,如果為0x00則表示該消息為廣播。
5)同步幀消息:由當(dāng)前的同步主控節(jié)點(diǎn)產(chǎn)生,用于同步各節(jié)點(diǎn)信息發(fā)送。
6)系統(tǒng)配置模式消息:該消息分為進(jìn)人配置模式和退出配置模式兩種消息。
7)節(jié)點(diǎn)存活消息:包含節(jié)點(diǎn)全部狀態(tài)的數(shù)據(jù),確認(rèn)該節(jié)點(diǎn)的健康狀態(tài)。
3.2 通信過程
在分布式網(wǎng)絡(luò)中,第一條總線通信主要包括操控終端與4個(gè)控制節(jié)點(diǎn)之間的通信,第二條總線通信主要包括操控終端與8個(gè)控制節(jié)點(diǎn)之間的通信,以及控制節(jié)點(diǎn)之間的通信。通信過程包括5個(gè)基本過程。
1)控制過程:包括4類消息,即命令節(jié)點(diǎn)初始化、參數(shù)的傳送、系統(tǒng)配置、請求故障等消息,均為帶返回的消息序列。
2)命令過程:包括2類消息,即命令消息和請求返回消息。實(shí)現(xiàn)操瞄、發(fā)控等功能命令,節(jié)點(diǎn)收到每條命令均需返回請求返回消息。
3)查詢過程:包括1類消息,即命令消息。進(jìn)行操瞄、發(fā)控、聯(lián)鎖、配電等信息的查詢,采用事件觸發(fā)方式。節(jié)點(diǎn)收到查詢命令,按照應(yīng)用協(xié)議返回查詢狀態(tài)。
4)狀態(tài)上傳過程:包括1類消息,即節(jié)點(diǎn)存活消息,周期上傳。
3.3 消息流程
按照頂層設(shè)計(jì)的方法,分析系統(tǒng)各個(gè)功能組成部分對消息的需求,將這些消息編制成文件,然后進(jìn)行信息綜合,從而設(shè)計(jì)總線數(shù)據(jù)信息流。然后根據(jù)消息產(chǎn)生和傳輸消耗的時(shí)間,安排操作的先后次序。依據(jù)功能所需的時(shí)間以及邏輯所允許的最大和最小時(shí)間間隔來確定消息傳輸?shù)闹芷?并排定一個(gè)周期中傳輸發(fā)生的次數(shù)和相位。這個(gè)安排用消息頻率表表示,也是總線時(shí)序表,如表1所示。
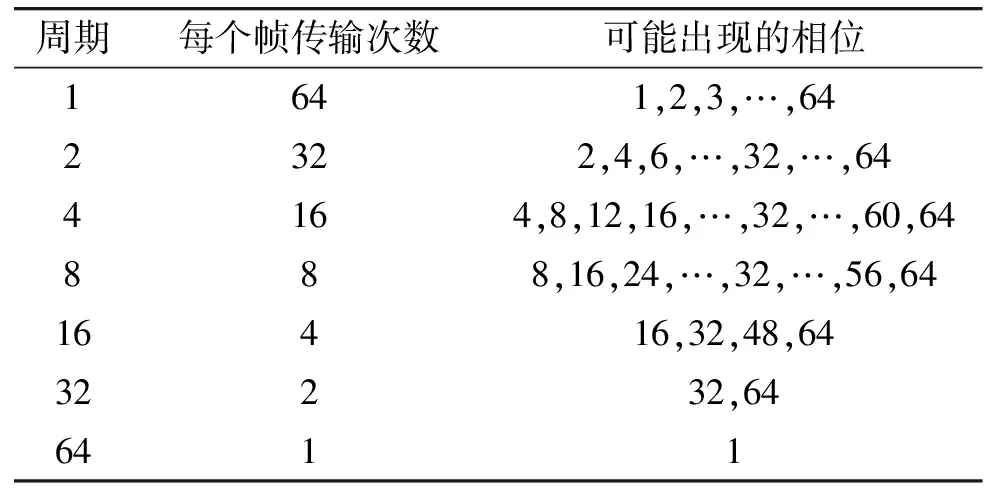
表1 消息頻率表
3.4 任務(wù)消息調(diào)度管理
把任務(wù)劃分成N個(gè)小任務(wù)。每個(gè)小任務(wù)有各自對應(yīng)的任務(wù)控制與調(diào)度任務(wù)(TCS),負(fù)責(zé)總線上信息傳輸?shù)倪^程和數(shù)值處理或計(jì)算的過程,在每個(gè)周期中重復(fù)迭代,稱為同步控制調(diào)度方法,如圖5所示。
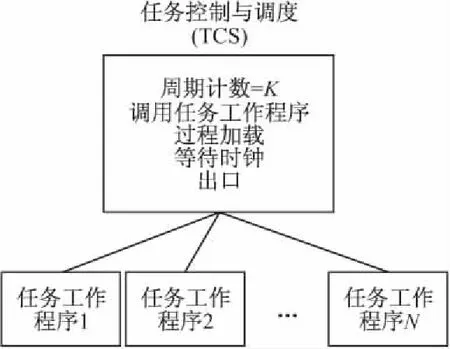
圖5 同步控制調(diào)度方法
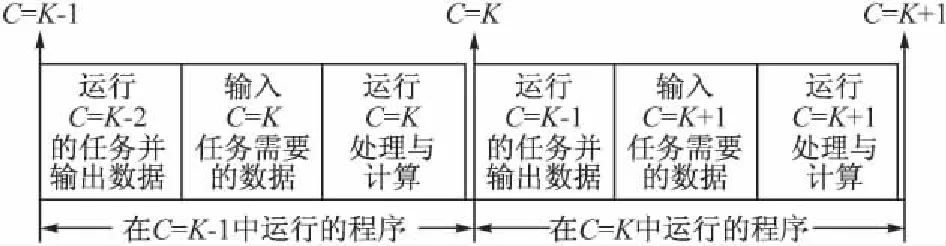
圖6 同步消息傳輸時(shí)間刻度
將同步控制調(diào)度方法以時(shí)間軸展開,形成同步消息傳輸?shù)臅r(shí)間刻度,如圖6所示,以3個(gè)典型周期(K-1,K,K+1)為例的調(diào)度過程。C表示周期計(jì)數(shù)。
3.5 控制模式
根據(jù)系統(tǒng)工作特點(diǎn),以及網(wǎng)絡(luò)信息的觸發(fā)方式,系統(tǒng)信息控制將分為兩大類,一類是與操作顯示有關(guān)的控制,一類是與傳感反饋有關(guān)的信息。綜合系統(tǒng)的信息特點(diǎn)和使用模式,將劃分操作控制模式、節(jié)點(diǎn)控制模式。
1)操作控制模式
操作控制模式的核心是操控終端,如圖7所示。操作者通過操控終端的操作面板發(fā)出控制指令,操控終端將指令發(fā)往CAN總線,節(jié)點(diǎn)n收到指令后輸出控制信號,驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)工作。同時(shí)節(jié)點(diǎn)n將設(shè)備的工作參數(shù)和狀態(tài)再通過CAN總線返回給操控終端進(jìn)行動(dòng)態(tài)顯示。
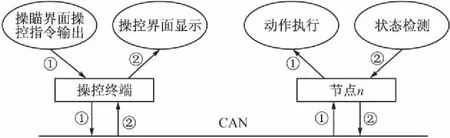
圖7 操作控制模式圖
2)節(jié)點(diǎn)控制模式
節(jié)點(diǎn)控制模式的核心按照功能不同,分為操瞄、發(fā)控、聯(lián)鎖、配電、指揮等不同的中心,各個(gè)中心節(jié)點(diǎn)與其它相關(guān)節(jié)點(diǎn)間進(jìn)行信息交互,完成信息采集后,實(shí)施控制,如圖8所示。當(dāng)節(jié)點(diǎn)n檢測到外界輸入觸發(fā)信息時(shí),驅(qū)動(dòng)執(zhí)行機(jī)構(gòu)執(zhí)行動(dòng)作i,當(dāng)需要其它節(jié)點(diǎn)控制設(shè)備工作時(shí),再將控制指令通過CAN總線傳給節(jié)點(diǎn)m,進(jìn)而執(zhí)行動(dòng)作j。它們的動(dòng)作信息及動(dòng)作執(zhí)行后設(shè)備的工作參數(shù)通過CAN總線上傳給操控終端進(jìn)行顯示。
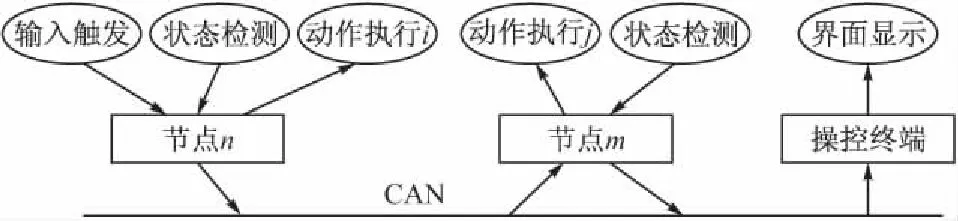
圖8 節(jié)點(diǎn)控制模式圖
4 應(yīng)用設(shè)計(jì)
4.1 應(yīng)用協(xié)議
根據(jù)MilCAN協(xié)議標(biāo)識符格式(見圖2),設(shè)計(jì)應(yīng)用層協(xié)議(其中每位用字母b代替),這里給出CAN1的應(yīng)用協(xié)議:
報(bào)文源地址b7~b0:按位編碼,賦予每個(gè)單體;
子類型b15~b8:高位復(fù)制主類型碼,低位是子類型碼;
主類型b23~b16:8類主類型,高低位同時(shí)編碼;
請求位b24:0/1;
協(xié)議類型b25:1;
優(yōu)先級b28~b26:8級優(yōu)先,按位編碼。
通信數(shù)據(jù)內(nèi)容這里不再贅述,只對數(shù)據(jù)格式進(jìn)行設(shè)計(jì)和說明。按照位數(shù)和精度要求,開關(guān)量按位傳送,一個(gè)字節(jié)8個(gè)數(shù)據(jù);浮點(diǎn)數(shù)據(jù)統(tǒng)一采用一個(gè)字節(jié)一個(gè)數(shù)據(jù),最高位0代表正數(shù),1表示負(fù)數(shù),整數(shù)部分占4 bit,小數(shù)部分占3 bit[6]。
4.2 節(jié)點(diǎn)設(shè)計(jì)[5]
節(jié)點(diǎn)硬件電路采用模塊化設(shè)計(jì),系統(tǒng)主要由5部分構(gòu)成:電源電路、處理器最小系統(tǒng)電路、信號調(diào)理電路、驅(qū)動(dòng)電路、CAN收發(fā)接口電路。節(jié)點(diǎn)軟件為嵌入式模塊化結(jié)構(gòu),統(tǒng)一配置,見軟件部分。
4.3 軟件設(shè)計(jì)
1)軟件系統(tǒng)架構(gòu)
控制系統(tǒng)軟件主要包括控制軟件、顯示軟件、通信軟件、執(zhí)行軟件等。
2)節(jié)點(diǎn)軟件
節(jié)點(diǎn)軟件設(shè)計(jì)采用模塊化設(shè)計(jì),分為初始化模塊、任務(wù)功能模塊、消息調(diào)度模塊、通信模塊,如圖9所示。
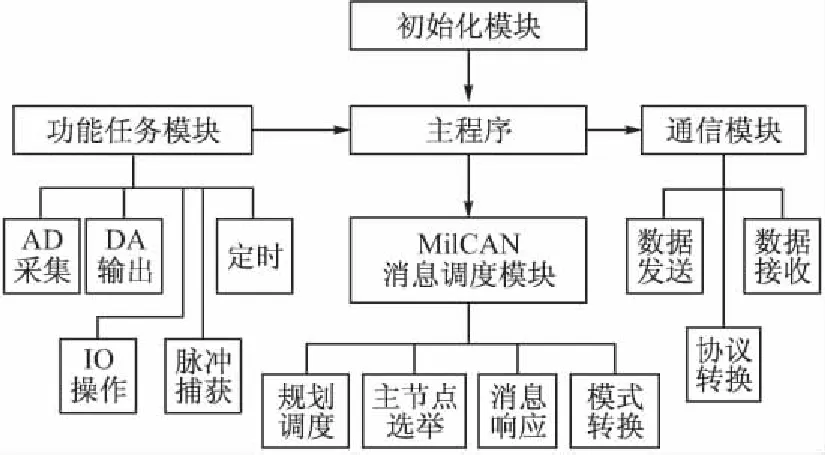
圖9 軟件主要功能模塊
5 性能分析與驗(yàn)證
總線報(bào)文傳輸時(shí)間[2]:
TCAN_data=64+8m+(54+8m)/8
式中:TCAN_data表示報(bào)文傳輸時(shí)間;m為報(bào)文個(gè)數(shù)。擴(kuò)展幀的起始、仲裁、校驗(yàn)、應(yīng)答和結(jié)束共有64 bit,數(shù)據(jù)長度為8mbit,總線填充估計(jì)為(54+8m)/8 bit。
系統(tǒng)應(yīng)用中均為命令式指令,最多時(shí)為2個(gè)字節(jié),所以每次總線開銷最大為88.75 bit。CAN的波特率設(shè)計(jì)為250 Kbit/s,則一次通信僅為0.4 ms。如果9個(gè)節(jié)點(diǎn)實(shí)施時(shí)間片控制,最多3.6 ms傳輸完成。按照控制需要,采樣周期為20 ms,則每個(gè)節(jié)點(diǎn)相位應(yīng)設(shè)置為2 ms。顯然,在整個(gè)周期中,各個(gè)節(jié)點(diǎn)在0.002 2 s內(nèi),任何終端的數(shù)據(jù)都能夠發(fā)送和接收完成。
設(shè)計(jì)基于STM32芯片的CAN節(jié)點(diǎn),如圖10所示,具有兩路CAN接口,并具有AD、DA、IO等數(shù)據(jù)采集功能。系統(tǒng)采用總線型拓?fù)浣Y(jié)構(gòu),連接9個(gè)節(jié)點(diǎn),并進(jìn)行了測試。測試采樣主控節(jié)點(diǎn)同步下的從節(jié)點(diǎn)循環(huán)發(fā)送方式,測試結(jié)果如表2所示。
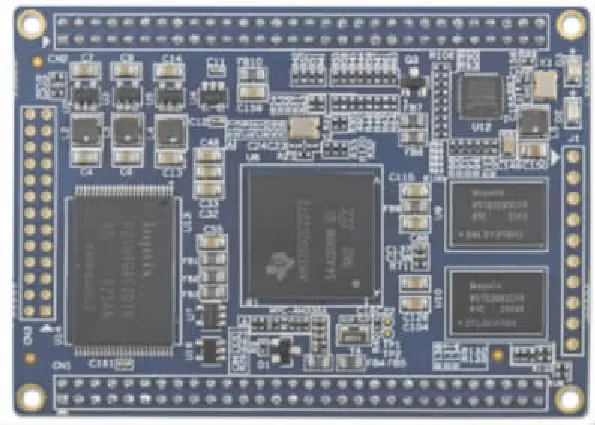
圖10 節(jié)點(diǎn)電路
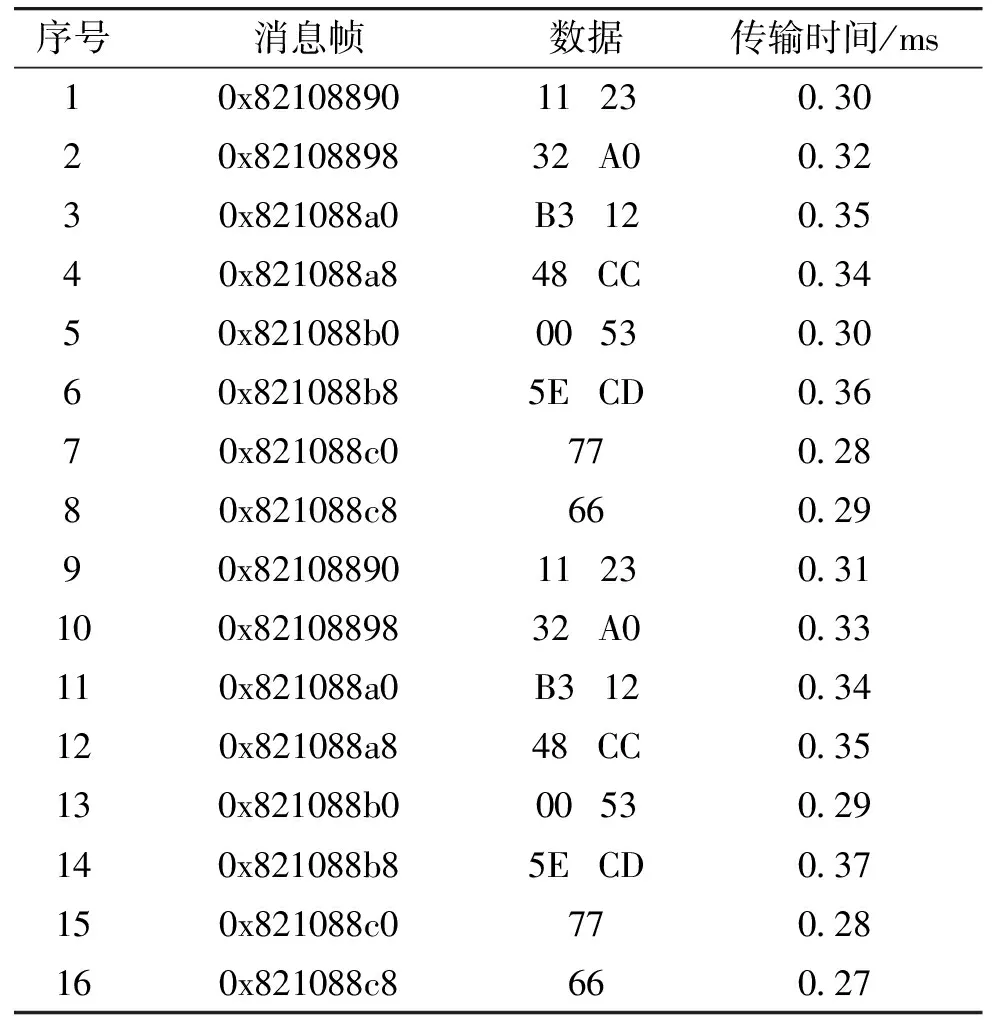
表2 總線報(bào)文記錄表
試驗(yàn)結(jié)果表明,該分布式控制系統(tǒng)采樣的總線及其控制方式能夠滿足系統(tǒng)要求。
6 結(jié)論
文中在CAN2.0B基礎(chǔ)上,應(yīng)用MilCAN總線協(xié)議,設(shè)計(jì)了分布式火箭炮控制系統(tǒng)。總結(jié)了系統(tǒng)的功能和要求,以此設(shè)計(jì)了消息類型和流程機(jī)制、調(diào)度管理方法,并規(guī)劃了總體架構(gòu)和應(yīng)用協(xié)議,最后設(shè)計(jì)了節(jié)點(diǎn)電路和軟件。通過測試和分析,表明設(shè)計(jì)的基于MilCAN總線的分布式火箭炮控制系統(tǒng)能夠滿足系統(tǒng)要求。
火箭炮系統(tǒng)采用總線結(jié)構(gòu)將大大降低系統(tǒng)電纜數(shù)量,簡化系統(tǒng)配置,優(yōu)化數(shù)據(jù)鏈,便于維修檢測。采用總線機(jī)制,實(shí)現(xiàn)控制系統(tǒng)實(shí)時(shí)信息傳輸控制和信息共享,完成調(diào)炮控制、發(fā)射控制、安全聯(lián)鎖等實(shí)時(shí)控制任務(wù)。該種方式優(yōu)點(diǎn)是各功能單元集成化程度高,數(shù)據(jù)傳輸實(shí)現(xiàn)了全數(shù)字化,優(yōu)化了信息流,并且便于擴(kuò)展和獨(dú)立升級。
[1] 宋小慶,熊全謙,王治國,等.裝甲車輛自動(dòng)配電系統(tǒng)MilCAN總線通信設(shè)計(jì) [J].裝甲兵工程學(xué)院學(xué)報(bào),2010,24(5):57-62.
[2] 宋小慶,陳永星,朱昀炤,等.基于有色Petri網(wǎng)的MiLCAN網(wǎng)絡(luò)仿真與性能分析 [J].系統(tǒng)仿真學(xué)報(bào),2013,25(增刊):95-98.
[3] 王泓.CAN總線消息機(jī)制 [J].中國測試技術(shù),2006,32(1):130-131.
[4] 楊曉華,侯巍,王樹新,等.基于CAN總線的分布式控制網(wǎng)絡(luò)設(shè)計(jì) [J].低壓電路,2006(1):40-42.
[5] 穆陽,薄拾,趙凱,等.MilCAN總線同步及調(diào)度配置方法 [J].計(jì)算機(jī)測量與控制,2014,23(4):1391-1393.
[6] 李光耀,郭迎清,王海泉.基于CAN總線的航空發(fā)動(dòng)機(jī)分布式控制系統(tǒng)通信研究 [J].測控技術(shù),2009,28(1):62-66.
ResearchonDistributedControlSystemofRocketLauncher
ZHANG Jianxin
(Hubei Jiangshan Heavy Industries Co.Ltd,Hubei Xiangyang 441057,China)
With increasing rocket launcher automation,the control system is more and more complicated.In order to reduce complexity of the monomer,improve flexibility of the system configuration,module level was improved to effectively enhance product reliability,maintainability and testability.Distributed rocket gun control system was designed.In this paper,top-down principle and system engineering method were used to study target function,architecture and message mechanism of the distributed system.According to the characteristics of rocket launcher developed,communication protocol was given,the design idea of distributed node was put forward.Through the development of distributed nodes and system test,it shows that the design can meet the requirements,and the operation mechanism is reliable.
rocket launcher; CAN bus; MilCAN; control system; distributed control
10.15892/j.cnki.djzdxb.2017.02.008
2016-06-30
張建新(1980-),男,陜西清澗人,高級工程師,碩士,研究方向:火箭炮總體,信息系統(tǒng)與自動(dòng)控制。
TJ713
A
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年16期)2014-03-01 04:28:54