基于射頻技術(shù)的智慧物流分撥倉
2017-11-08 00:02:12李興國端木希睿廖鴻輝陳麟杰郭賀朋
中文信息 2017年9期
李興國+端木希睿+廖鴻輝+陳麟杰+郭賀朋
摘 要:本文介紹了一種通過曲柄滑塊結(jié)構(gòu)完成分揀的物流機械系統(tǒng)。本系統(tǒng)采用STM32F103控制,通過射頻閱讀器檢測識別快件,步進電機實現(xiàn)對曲柄結(jié)構(gòu)的控制進而完成對快件的分撥。整個系統(tǒng)能夠完成快件信息的高速讀取與分揀,易于組裝和系統(tǒng)優(yōu)化。
關(guān)鍵詞:物流分揀 射頻 RFID 曲柄滑塊
中圖分類號:TH1 文獻標(biāo)識碼:A 文章編號:1003-9082(2017)09-0-01
緒論
目前我國物流業(yè)中存在包裹分揀速度慢,人工費時費力,分揀動作不規(guī)范化導(dǎo)致包裹受損等問題,國外有能夠完成自動化分揀的物流機器人,但造價昂貴,并不能適用于中國物流訂單量大,物流包裹大小不一的情況。針對這些問題本文介紹了一種新型的能夠通過RFID技術(shù)幫助物流中轉(zhuǎn)中心完成自動化分揀的設(shè)備,可以通過在現(xiàn)有的分撥倉傳送帶上加裝步進電機驅(qū)動的曲柄滑塊結(jié)構(gòu)的物流分揀推手完成分揀動作,并配合緩沖軌道保護包裹的安全。
一、曲柄滑塊結(jié)構(gòu)
本設(shè)計的主要運動部件是四桿滑塊機構(gòu),四桿中除機架以外其余三桿依次是主動桿、中間桿和推桿,其長度依次為97mm、197mm、300mm(此長度是執(zhí)行長度,即除去了螺栓聯(lián)接部分和兩端的長度)。主動桿的轉(zhuǎn)速可以根據(jù)相應(yīng)的實際情況進行更改,初步設(shè)置為2.5r/s(即150r/s)。
二、分撥機主要機構(gòu)簡單運動學(xué)、力學(xué)計算
假設(shè)傳送帶的寬度是300mm,運行速度是1m/s,傳送帶與被傳送的物體之間的摩擦因數(shù)μ為0.36,物體被傳送時放置于傳送帶的中間,取重力加速度為9.8N/Kg。在某一位置處有一個分撥裝置,分撥裝置給被傳送物體的加速時間為0.14s,即傳送帶運動0.14m,由分撥裝置的結(jié)構(gòu)可知加速距離為13.5cm,推桿的平均加速度約為12.3m/s2,設(shè)某一物體的質(zhì)量是1.75Kg,則推桿的推力至少應(yīng)為21.525N。
所以分撥機給物體(快遞)的合力為:;
有上述的計算可知,橫向分撥裝置在推出被傳送的物體的過程中的平均速度是,橫向分撥裝置的最前端的理論安裝位置是距傳送帶邊緣(分撥裝置安裝一側(cè))30mm。
由上述計算可簡單計算出四桿滑塊機構(gòu)中的主動桿上端應(yīng)該提供的垂直于主動桿的力的大小為35.80N,所以主動桿所提供的扭矩為3.33N·m,考慮到四桿滑塊機構(gòu)其本身質(zhì)量和作用在其自身的加速度的影響,步進電機的輸出扭矩選擇3.5N·m,由功率計算公式初略計算出步進電機的瞬時功率為49.48w。結(jié)合步進電機轉(zhuǎn)速和扭矩綜合考慮(150r/min、3.5N·m),步進電機的型號選為57BYG250-76(自帶減速器,減速比為1∶7.5,輸出扭矩最大可達1.48×7.5=11.1)。
三、MCU控制簡述
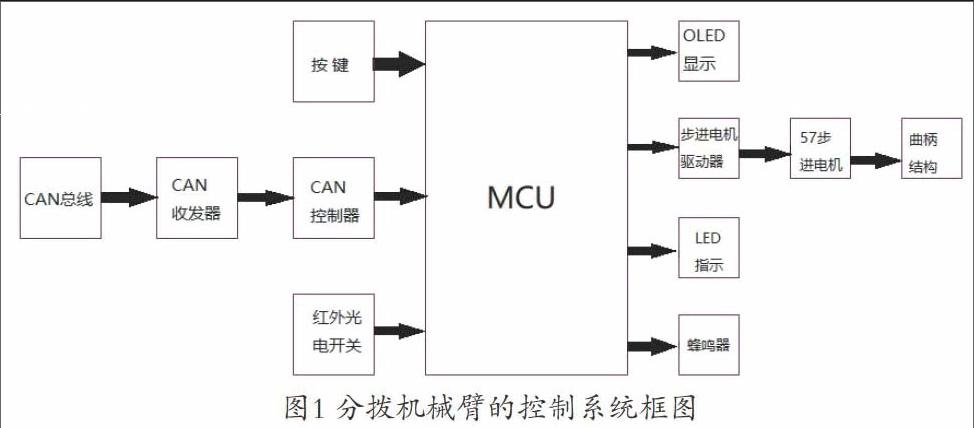
本系統(tǒng)采用ST公司的stm32f103rbt6為核心控制器,通過與閱讀器進行通信,實現(xiàn)對快件的物流信息獲取,然后通過協(xié)調(diào)器將其交付給數(shù)據(jù)服務(wù)器并判斷快件是否發(fā)錯或者返回,以及對快件的分撥。其整體功能圖如圖2所示。
首先協(xié)調(diào)器通過閱讀器對電子標(biāo)簽上的信息進行讀取,并將該信息傳回數(shù)據(jù)庫服務(wù)器上判斷該包裹是否應(yīng)當(dāng)發(fā)往本分撥中心,如果不是,就會提醒工作人員進行檢查,該快件是發(fā)錯、還是需要返回的快件,如果是就將快件放入傳帶上,在信息比對確認是發(fā)往該分撥中心后,將相應(yīng)信令通過CAN控制器發(fā)送給控制相應(yīng)的分撥機械手的MCU,在MCU內(nèi)部,使用隊列(Queue)這一先進先出(FIFO)的數(shù)據(jù)結(jié)構(gòu)對信令進行存儲,采用循環(huán)隊列實現(xiàn)存儲功能。
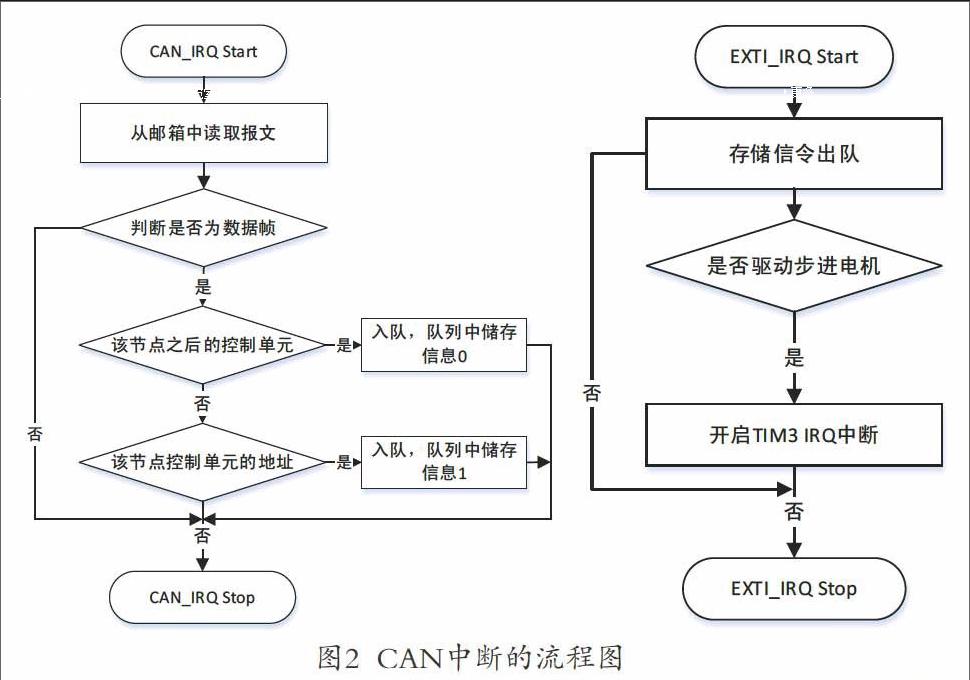
當(dāng)控制相應(yīng)的分撥機械手的MCU接收到來自CAN總線的命令的時候,接收報文,并將控制信息進行入隊操作,存儲控制信息其入隊存儲實現(xiàn)如圖3左圖所示;MCU通過外部的傳感器是否掃描到有快件通過來實現(xiàn)對存儲信息的控制隊列進行出隊的操作,并對控制信息進行判斷,如果控制信息內(nèi)容是0就不對快件進行操作,如果控制信息內(nèi)容是1,MCU對步進電機的控制器發(fā)送控制信號,進而步進電機控制器對步進電機進行勵磁,從而帶動機械臂,將快件分撥到收納網(wǎng)中,其流程圖如圖3右圖所示。當(dāng)分撥機械手分撥的快件達到一定的數(shù)量的時候,MCU會自己發(fā)出提示提醒工作人員將物品收納網(wǎng)進行打包。
結(jié)束語
以上通過曲柄滑塊結(jié)構(gòu)完成分揀的物流機械系統(tǒng),以STM32F103為控制系統(tǒng),通過射頻閱讀器快速讀取快件上的電子標(biāo)簽上的信息,來實現(xiàn)快件高效的分揀。經(jīng)實驗檢測此分揀設(shè)備能夠在一分鐘內(nèi)完成50次物流的分揀工作,通過機械及自動化來代替人工枯燥的勞動是未來必然的趨勢,是一種解決物流問題的可靠方案。
參考文獻
[1]林光春.機械設(shè)計課程設(shè)計 [M].四川:四川大學(xué)出版社,2013.
[2]張毅剛.單片機原理與應(yīng)用設(shè)計 [M]. 北京:電子工業(yè)出版社,2016.
[3]邱宣懷.機械設(shè)計 [M]. 北京:高等教育出版社,2014.
[4]唐文彥.傳感器 [M].北京:機械工業(yè)出版社,2014.
[5]易紅.數(shù)控技術(shù) [M]. 江蘇:東南大學(xué)出版社,2013.
[6]陳越、何欽銘等. 數(shù)據(jù)結(jié)構(gòu)[M],高等教育出版社,2016.6.endprint