船舶運動模擬器運動學正解數值解法對比分析
2017-11-07 09:21:14黨嬰龍徐合力
中國航海 2017年1期
黨嬰龍, 徐合力, 高 嵐
(武漢理工大學 能源與動力工程學院, 武漢 430063)
船舶運動模擬器運動學正解數值解法對比分析
黨嬰龍, 徐合力, 高 嵐
(武漢理工大學 能源與動力工程學院, 武漢 430063)
為研究船舶運動模擬器運動學正解的數值解法,建立其運動平臺的數學模型,將運動學正解問題轉化為非線性方程組的無約束最優化問題。分別采用數值迭代算法中的牛頓法、逆Broyden秩1法、Broyden-Fletcher-Shanno(BFS)秩2法及Broyden-Fletcher -Goldfarb-Shanno(BFGS)法進行求解,運用MATLAB編程并采用同一數值模型對這4種算法進行對比分析。分析結果表明:4種算法在工作空間內都收斂且數值穩定,BFS秩2法的迭代效率最高,BFGS法可用于奇異場合。通過仿真試驗對各算法進行適當的修改,優化各算法的迭代效率并增加其對初值的魯棒性,為位姿正解應用于實時控制場合提供理論指導。
運動學正解; 牛頓法; 逆Broyden秩1法; BFS秩2法; BFGS; 優化
Abstract: In order to investigate the numerical methods for solving direct kinematics problems of the ship motion simulator, a mathematical model of the motion platform is established and the kinematics problems are transformed to the unconstrained optimization problem of the nonlinear equations. The Newton method, single rank inverse Broyden, rank-two BFS and BFGS method are used to solve the problem respectively and the MATLAB program is used to verify and compare the algorithms with the same numerical model. The analysis results show that all the algorithms are convergent and stable in the workspace, while rank-two BFS shows the highest efficiency. The BFGS method can be used in singular cases. Through experiments, all the algorithms are modified and optimized for better iterative efficiency and the robustness to initial valuses.
Keywords: direct kinematics; Newton method; single rank inverse Broyden; rank-two BFS; BFGS; optimization
船舶運動模擬器主要用于艦船設備測試和海員教學培訓,可減少實船試驗次數、縮短設備開發周期、提高海上搜救人員的適應能力和業務素質。運動學正解問題是研究運動模擬器動力學、軌跡規劃和位姿控制等內容的重要基礎,因此進行船舶運動模擬器的運動學正解研究具有重要意義。
受模擬器運動平臺結構特性的影響,其運動學逆解問題容易求解,而正解問題較難求解,因此可利用逆解公式進行桿長逼近,反向求出滿足一定精度要求的正解,這實質上是牛頓法的應用。[1]利用牛頓法求解時每次迭代都需求一次逆矩陣,運算量較大;擬Newton法包括逆Broyden秩1法、Broyden-Fletcher-Shanno (BFS)秩2法和Broyden-Fletcher-Goldfarb-Shanno (BFGS)法等,相比牛頓法,其運算量大大減少,迭代速度也明顯提高。[2]為觀察各算法的迭代效率,采用統一的誤差對這些算法進行對比分析。由于模擬器運動方程具有高維和耦合性,3種擬Newton法標準算法的初始方向選取規則不能保證收斂,因此通過仿真試驗修改3種擬Newton法的初始迭代方向選取規則,這不僅能優化迭代效率,而且可擴大初值的取值范圍。此外,在BFGS法的迭代過程中采用非單調搜索并加入擾動項和重復生成策略,以保證收斂。
1 運動學正解模型
船舶運動模擬器用來模擬船舶在海浪中的搖晃運動,其核心設備是一個Stewart并聯機構。該機構主要由2個平臺和6個支桿構成,驅動單元通過驅動6個支桿的伸縮使上平臺完成空間6個自由度的運動模擬。依據典型的6-6型Stewart平臺建立模型,圖1為該平臺機構簡圖,其中上平臺和下平臺的各絞點連接起來構成2個六邊形,設r1和r2分別為2個六邊形所對應的外接圓半徑,θ1和θ2分別為2個六邊形短邊所對應的圓心角,上平臺和下平臺六邊形隔點相連構成2個正三角形。分別在上平臺和下平臺上建立坐標系O′-x′y′z′和O-xyz,O′和O分別為2個六邊形的外接圓圓心,設O′的絕對坐標為(x0,y0,z0),O的絕對坐標為(0,0,0)。O′x′軸和Ox軸分別取線段B1B6及A1A6的中垂線方向且指向平臺外部,O′z′軸和Oz軸分別垂直于上平臺及下平臺且方向朝上,O′y′軸和Oy軸的方向根據右手規則確定,初始位置處上平臺與下平臺互相平行。Ai為上平臺的第i個鉸點在O-xyz中的坐標,Bi為下平臺的第i個鉸點在O-xyz中的坐標。上平臺位姿設為X(x,y,z,α,β,γ)。R為由坐標系O′-x′y′z′到坐標系O-xyz的齊次變換矩陣。則
(1)
式(1)中: c為cos;s為sin。
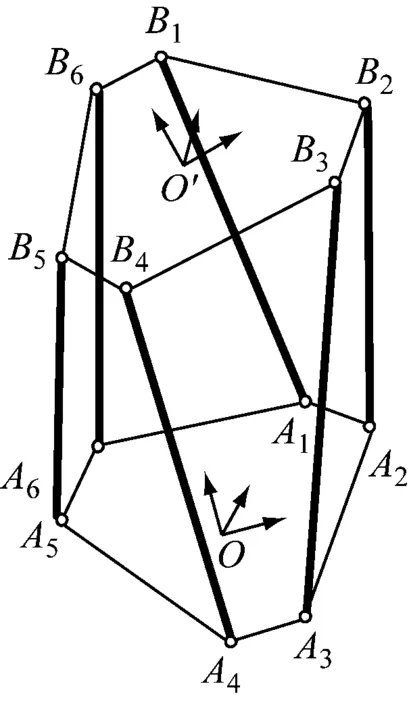
圖1 Stewart平臺機構簡圖
2 算法簡介及優化
2.1牛頓法
對于非線性方程組F(x)=0,滿足
(2)
式(2)中:n≥2。其牛頓迭代式為
xk+1-xk=-(F′(x))-1F(x)
(3)

牛頓法迭代程序:

2) 計算xk+1=xk+dk,dk=-F′(xk)F(xk),F(xk+1),F′(xk+1)。

2.2逆Broyden秩1法
逆Broyden秩1法迭代程序:

一般情況下,初始方向選取為H0=I或H0=(F′(x0))-1。[3]當迭代初值遠離最優解時,該選取規則可能失效,造成結果不收斂。為增加算法對初值的魯棒性,規定初始方向選取新規則:
1)H0=(F′(x0))-1。

3) 根據模型需要,選取a=100。
新規則將遠離最優解的初值的方向矩陣替換為平臺初始點的方向矩陣,經多組初值檢驗發現,新規則既可優化迭代效率,又能增強算法對初值的魯棒性。
2.3BFS秩2法
BFS秩2法迭代程序:

初始方向選取新規則[4]:
1)H0=(F′(x0))-1,記號變量Δ=0。

3) 當Δ=1且迭代次數k>m時,Hk+1=Hk,根據需要選取m=2。
新規則將遠離最優解的初值方向矩陣替換為平臺初始點的方向矩陣,并在迭代過程中保留和維持一個優化的迭代方向,增強了算法對初值的魯棒性。
2.4BFGS法
BFGS法是求解無約束最優化問題最有效的方法之一,但對非凸函數的最優化問題不具有全局收斂性,當目標函數在迭代過程中存在細長、彎曲的峽谷時,采用單調性搜索算法會大大降低計算效率。非單調線性搜索不要求函數值在每步迭代中都單調下降,這使得步長因子的選取更具有彈性。因此,為優化算法的迭代效率,需采用非單調搜索算法并加入擾動項和重復生成策略。[5-6]
BFGS法迭代程序:

7) 輸出xk+1和f(xk+1),結束。
由于方向矩陣的位置分量與姿態分量的變化范圍不同,對目標函數的影響系數也不同,因此BFGS算法的初始方向不能按一般規則直接選擇單位矩陣I,這里規定初始方向H0選取的新規則為
n=round(lg(max(g0(4),g0(5),g0(6))))
(4)
(5)
采用重復生成策略為
(6)
(7)
式(5)~式(7)中:s=3;x=3。
經過仿真試驗,采用新規則可在迭代過程中跳出峽谷現象并收斂于最優解,與標準BFGS法相比,可大大提高迭代速度和初值的魯棒性。
3 數值算例及分析
給定Stewart平臺數據為:r1=250 mm,r2=270 mm,θ1=π/4,θ2=π/5,Lmax= 370 mm,Lmin= 300 mm。給定各桿長為:L1=331.777 1 mm,L2=324.103 0 mm,L3=358.139 2 mm,L4=338.397 0 mm,L5=329.075 2 mm,L6=356.475 7 mm。
為比較各算法的迭代效率,統一設定誤差為max(ΔLi′)。程序存在舍入誤差,經數據驗證后得知最大精度等級約為10-13。定義max(ΔLi′)的大小作為初值距離最優解遠近的標準。[7-8]
初值選取7個點:1個為平臺最初起點[0,0,322.6,0,0,0];2個在最優解[50, 50, 320,0,0,0]附近,分別為[49,49,319, 0,0,0]和 [49.9,49.9,319.9,0,0,0];2個在工作空間內隨機選取,其中一個離最優解較近,另一個離最優解較遠,分別為[48,47,321,0.01, 0.03,0.05]和[4,5,320,0.1,0.05,-0.03];2個在工作空間外選取,一個離最優解較近,另一個離最優解較遠,分別為[53,44,326,0.1,0.05,-0.03]和[55,55, 325,1,1,1]。各算法使用同一臺計算機,CPU為Inter(R)G630,主頻為2.70 GHz,內存為4 GB,操作系統為Windows XP。4種算法迭代效率比較見表1。

表1 4種算法迭代效率比較
由表1可知:
1) 在相同的初值和誤差要求下,BFS秩2法的迭代時間最短、效率最高;牛頓法的迭代次數最少;BFGS法的迭代次數最多且用時較長。
2) 各算法的迭代效果均與初值有關,離最優解較近則迭代效果較好,遠離最優解則可能不收斂或收斂于其他解,因此初值應盡量在最優解附近。
3) 各算法對初值的要求均不高,在工作空間內即可。
為觀察各算法的具體迭代過程,選取初值為[49,49,319,0,0,0],繪出其迭代對比圖及局部放大圖見圖2和圖3。
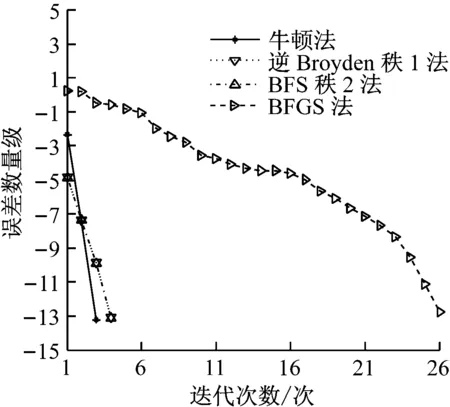
圖2 初值為[49,49,319,0,0,0]時的迭代對比圖
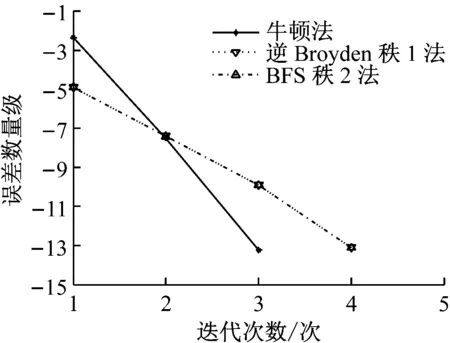
圖3 初值為[49,49,319,0,0,0]時的迭代對比局部放大圖
為說明BFGS法的優點,取奇異點[0,0, 0,0,0,π/2]作為迭代目標位姿。選取最優解附近點[0.1,0.1,0,0,0,1.57]作為迭代初值。[9-10]此時牛頓法、逆Broyden秩1和BFS秩2法全部失效,只有BFGS法依然有效。由奇異特性可知,初值點的位置分量中z軸分量在奇異曲線附近影響系數變大,因此在初始方向選取規則和重復生成策略中需對z軸分量和姿態分量作出相同變換,即令式(5)~式(7)中的s=2,x=4。其迭代過程見圖4。
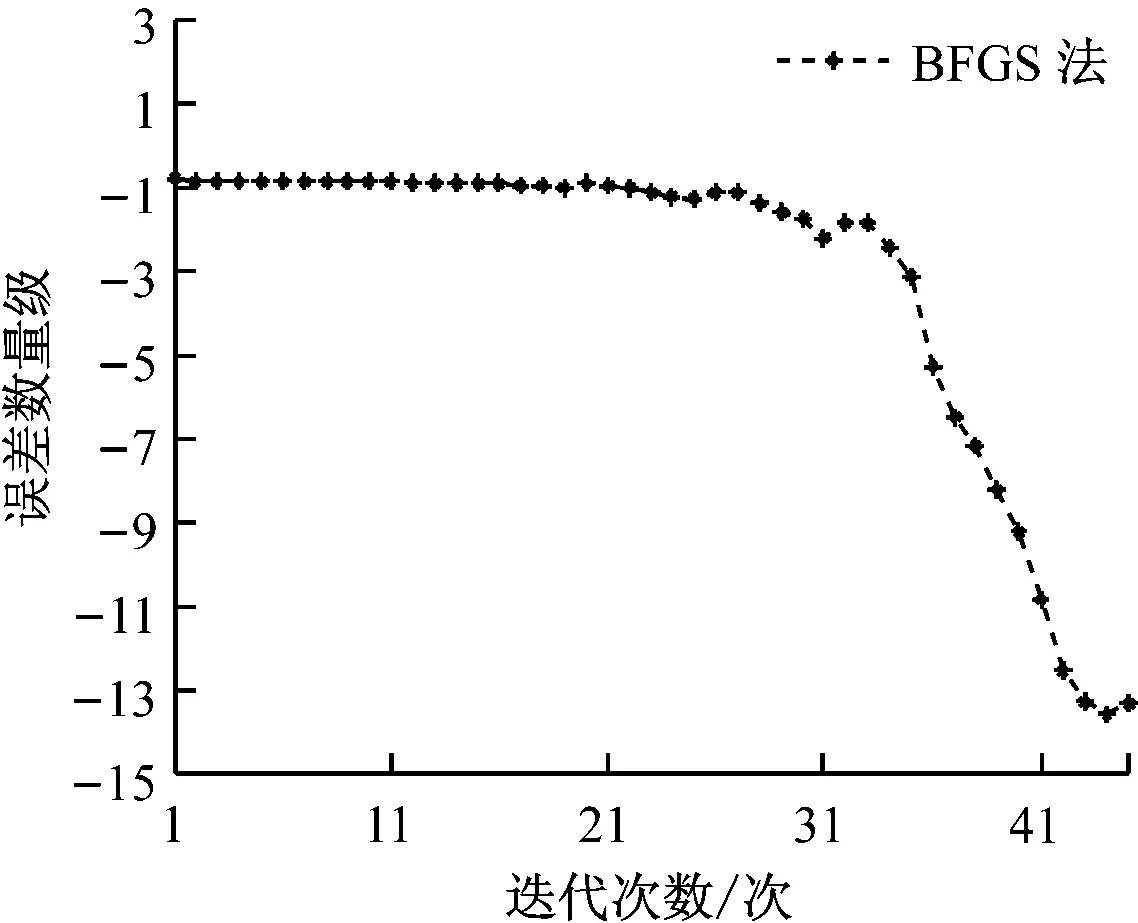
圖4 初值為[0.1,0.1,0,0,0,1.57]的迭代圖
4 結束語
以上4種數值迭代算法在工作空間內非奇異處均收斂,迭代結果均可達到較高的精度等級,而在實際控制中,可直接選用上一時刻的位姿數據作為迭代初值,根據機構運動的連續性,其迭代結果就是所需的最優解。
BFS秩2法用時最短,優于其他算法,對實時控制具有重要意義,但初始時仍需求一次逆矩陣,當初始方向矩陣奇異或病態時易迭代失敗。BFGS法用時雖較長,但無需求逆矩陣,當初值在奇異邊界附近時依然有效,這對模擬器機構奇異分析和初期設計具有重要意義。
[1] 姜虹,賈嶸,董洪智,等. 六自由度并聯機器人位置正解的數值解法[J].上海交通大學學報,2000,34(3):351-353.
[2] 耿明超,趙鐵石,王唱,等.基于擬Newton法的并聯機構位置正解[J].機械工程學報,2015,51(9):28-36.
[3] 王斌.非線性方程組的逆Broyden秩1擬Newton方法及其在MATLAB中的實現[J].云南大學學報(自然科學版),2008,30(S2): 144-148.
[4] 王斌.非線性方程組的BFS秩2擬Newton方法及其在MATLAB中的實現[J].云南民族大學學報(自然科學版),2009,18(3):213-217.
[5] 孫惠娟.求解非凸無約束優化問題的非單調BFGS方法[D].開封:河南大學,2008.
[6] YUAN GL,WEI ZX.Convergence Analysis of a Modified BFGS Method on Convex Mini-Mizations[J].Computational Optimization and Applications,2010,47(2):237-255.
[7] 楊伍梅,劉權.基于MATLAB的無約束優化問題對稱秩-1法與BFGS法之探討[J].懷化學院學報,2015,34(5):24-26.
[8] SEKHAR DC. GANGULI R. Modified Newton, Rank-1 Broyden Update and Rank-2 BFGS Update Methods in Helicopter Trim:A Comparative Study[J].Aerospace Science and Technology,2012,23(1):187-200.
[9] 曹毅.六自由度并聯機器人奇異位形的研究[D].秦皇島:燕山大學,2005.
[10] MA Jianming,HUANG Qitao,XIONG Haiguo.Analysis and Application of the Singularity Locus of the Stewart Platform[J].Chinese Journal of Mechanical Engineering,2011,24(1): 133-140.
ComparativeAnalysisofNumericalMethodsforDirectKinematicsinShipMotionSimulator
DANGYinglong,XUHeli,GAOLan
(Energy and Power Engineering College ,Wuhan University of Technology,Wuhan 430063,China)
TP242.2;U666.158
A
2016-12-11
黨嬰龍(1988—),男,河南洛陽人,碩士生,主要從事船舶自動化研究。E-mail:399811043@qq.com 徐合力(1963—),男,湖北武漢人,高級實驗師,主要研究方向為輪機工程船舶輔助機械系統。E-mail:406176290@qq.com
1000-4653(2017)01-0106-04
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
計算機應用(2022年2期)2022-03-01 12:33:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
甘肅教育(2020年14期)2020-09-11 07:57:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
時代英語·高二(2015年1期)2015-03-16 00:08:11
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05