一種方便上下爬樓的輪椅
2017-10-23 18:19:34李小齊
學習導刊 2017年1期
關鍵詞:自動化
李小齊
摘要:
普通輪椅一般由輪椅架、車輪、剎車裝置及座靠四部分組成。手搖輪椅在普通輪椅基礎上,增加手搖裝置。樓梯臺階等卻使輪椅的使用受到很大限制,傳統的輪椅智能在平地上行走,不能順利通過臺階等障礙物,更不能上下樓梯,一般需要借助外人進行搬抬,這對于一些住在沒有安裝電梯樓房中的輪椅使用者造成了麻煩。本設計將輪式和履帶型結合,以及輪椅自動化設計有效的解決了目前輪椅無法順利通過臺階樓梯等障礙的問題。
關鍵詞:輪椅 履帶型 自動化
技術背景:
輪椅是年老體弱者以及下肢傷殘者必不可少的代步工具。目前年老體弱者以及下肢傷殘者所用輪椅大多都是普通車輪式輪椅。隨著無障礙設施的增多,輪椅使用者的活動范圍逐步加大。但樓梯臺階等卻使輪椅的使用受到很大限制,因此研發價格低廉簡單易用的可爬樓梯臺階等障礙的輪椅是一項比較緊迫的任務。本設計主要用于解決目前輪椅無法順利通過臺階樓梯等障礙的問題。保證能夠在平地行走的同時,還能夠順利通過臺階登爬樓梯。本設計老人上下臺階輪椅具有占用空間小,使用方便,運動平穩,安全高效,行走效率高等特點。另外,本設計老人上下臺階輪椅中座椅高度具有可調節功能,以及在爬樓梯和斜坡時座椅可調節角度保證座椅水平平衡。
技術特點:
本設計主要用于解決目前輪椅無法順利通過臺階樓梯等障礙的問題。保證能夠在平地行走的同時,還能夠順利通過臺階登爬樓梯。本設計老人上下臺階輪椅具有占用空間小,使用方便,運動平穩,安全高效,行走效率高效等特點。另外,本設計老人上下臺階輪椅中座椅高度具有可調節功能,以及在爬樓梯和斜坡時座椅可調節角度保證使用者平衡舒適。
技術介紹:
1. 首先調整好座椅到適當高度和角度位置,之后使用者通過控制手柄可以對輪椅進行操作。
2. 在平地行走時,通過控制器,選擇使用輪式機構操作模式模式行走
3. 擋遇到臺階和樓梯等時,選擇履帶型機構行走模式,液壓控制系統降出內置履帶型機構,此時可調節座椅姿態,并調整座椅到合適高度和角度,保持座椅平衡和穩定。不用時,履帶型機構收回內部。
4. 通過控制器控制行走速度和方向。
結構介紹:
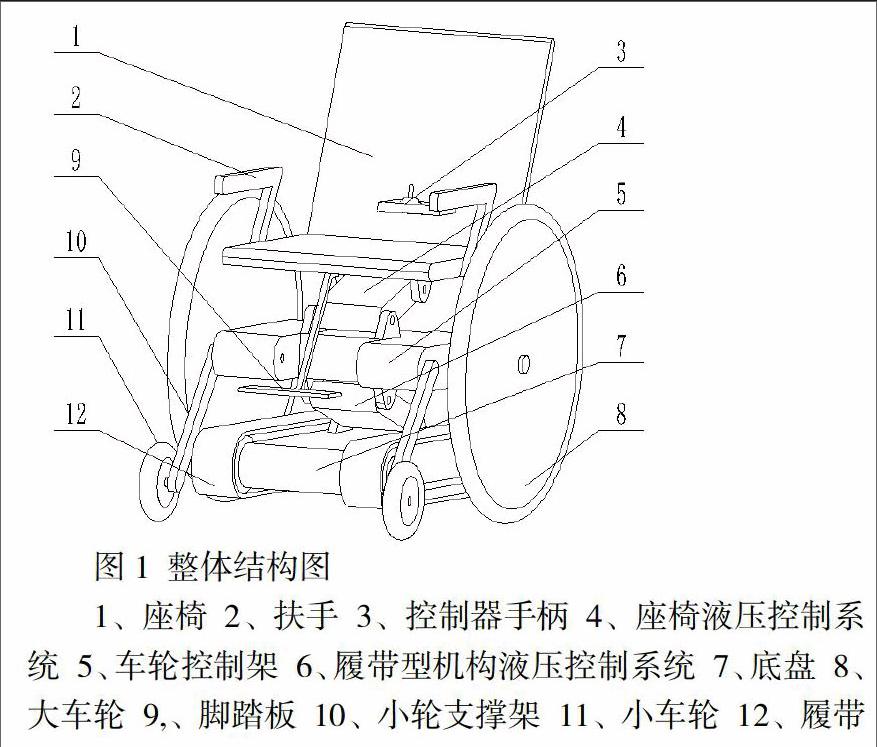
控制器手柄用于選擇行走模式,智能調空座椅姿態以適應使用者,以及控制行走速度。調整座椅高度。如圖所示控制器手柄固定在右扶手一側,適應使用者右手控制輪椅。腳踏板用于放置使用者雙腳,防止觸碰地面和履帶型機構,保證使用者安全。
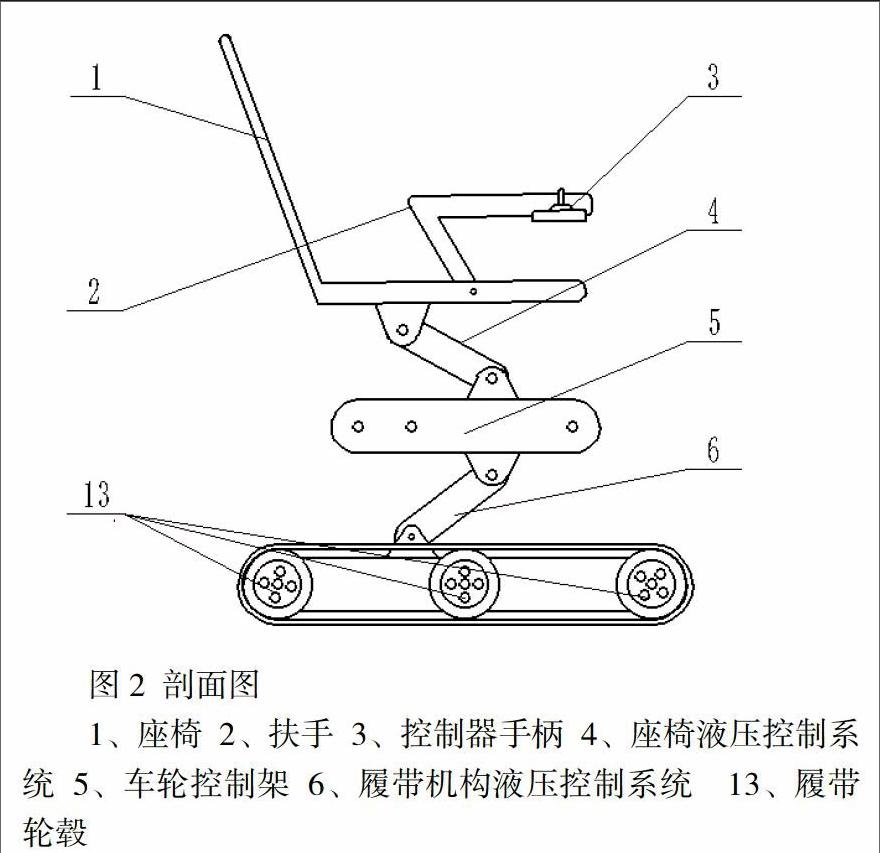
座椅液壓控制系統控制調節座椅姿態,保持一定高度和水平,適應使用者;履帶機構液壓控制系統控制調節履帶型機構。
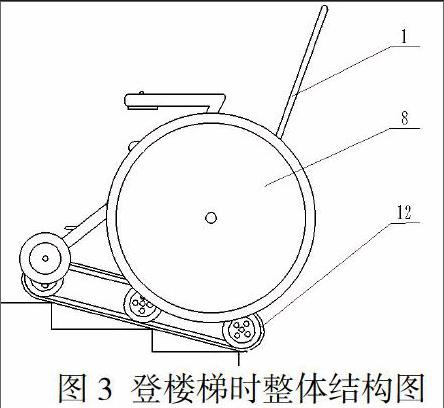
如圖3所示上述老人上下臺階輪椅遇到樓梯時,使用者在控制器手柄選擇履帶型行走模式,履帶型機構液壓控制系統控制履帶型機構,降下內置履帶型機構,并自動調整角度適應樓梯坡度,底盤控制驅動履帶運動登爬樓梯,使用控制手柄控制前進速度,同時可調節座椅到合適姿態。在平地行走時,選擇車輪行走模式,履帶型機構收回,車輪觸及地面,車輪控制架驅動大車輪前進,手動操作控制手柄控制前進速度和方向。
工作原理:
使用時,首先調整座椅到適當高度和角度位置,之后通過控制器手柄對輪椅進行操作。在平地行走時,通過控制器手柄,選擇使用輪式機構操作模式行走;擋遇到臺階和樓梯等時,選擇履帶型機構行走模式,此時內置履帶型機構液壓控制系統將履帶機構降下,隨著履帶機構的下降整個座椅抬起,直到大車輪離開地面,根據需要通過控制器手柄調節座椅的姿態,并調整座椅到合適高度和角度,保持座椅平衡和穩定,操控控制器手柄通過控制履帶型機構液壓控制底盤控制履帶車輪的行走速度和方向,進行爬樓。爬樓梯結束后,履帶型機構液壓控制系統收回內部。
部分零部件:
參考文獻
[1] 李超, 胡延平, 韋端利,等. 一種輪組結構的爬樓梯輪椅的設計[J]. 現代機械, 2010(6):42-44.
[2] 郭永利. 一種爬樓梯的輪椅: CN, CN2461518[P]. 2001.
[3] 王淑坤, 孟曉東, 尚鴻鵬. 一種輪履組合式爬樓輪椅的設計[J]. 機械傳動, 2013(10):156-159.
[4] 周秋雨, 邢曉冬. 一種可全向移動爬樓梯輪椅的結構設計與分析[J]. 機械傳動, 2016(4):74-80.
[5] 李育文, 位建康, 王紅衛,等. 一種新型的可爬樓梯輪椅結構設計及運動分析[J]. 制造業自動化, 2014(7):135-137.
[6] 張林, 黃亞宇. 基于TRIZ理論的爬樓輪椅行走機構創新分析與設計[J]. 新技術新工藝, 2014(10):62-64.endprint
猜你喜歡
經營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 21:28:54
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:49:55
科學與財富(2016年28期)2016-10-14 19:33:38
科學與財富(2016年28期)2016-10-14 03:14:22
